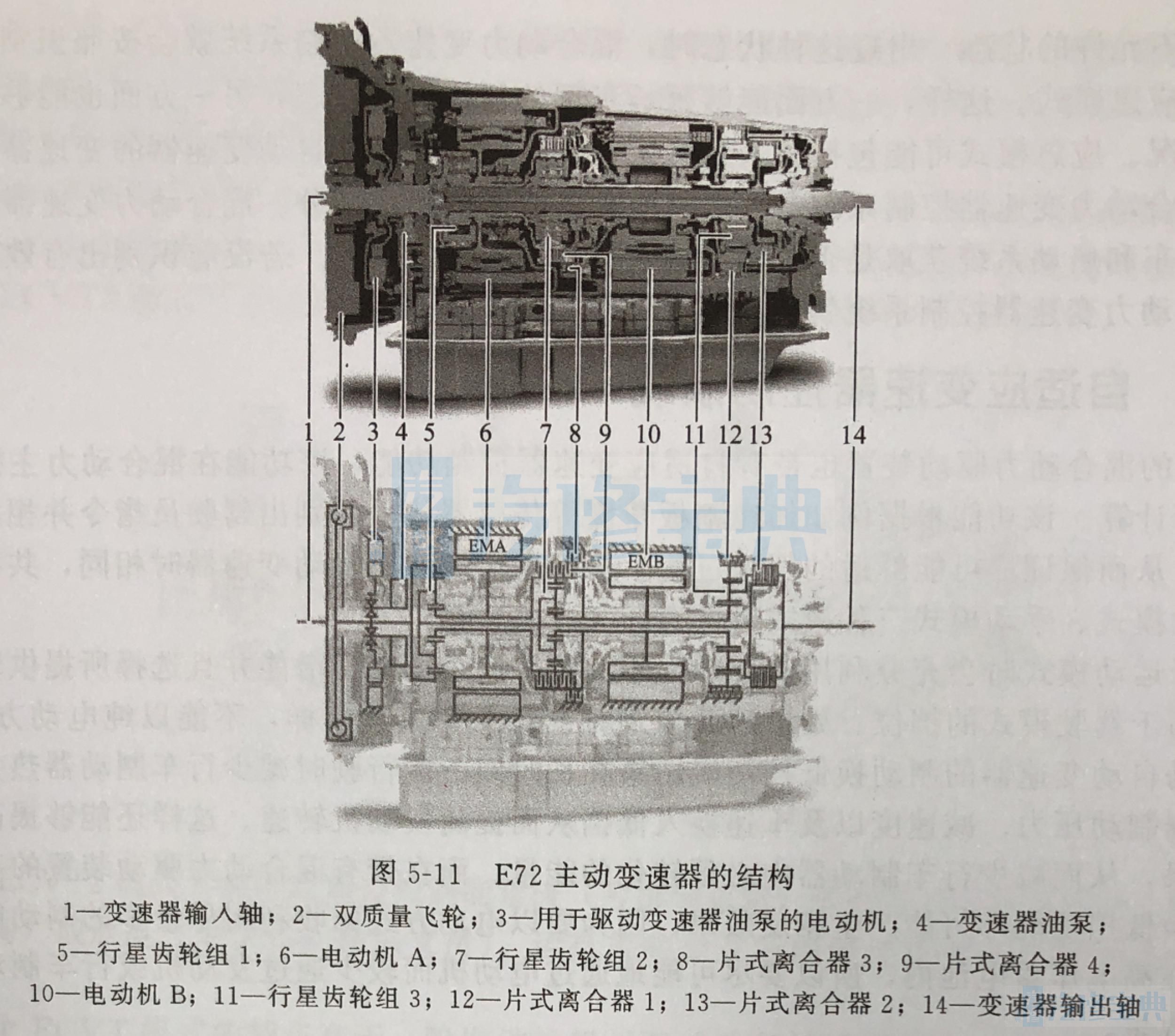
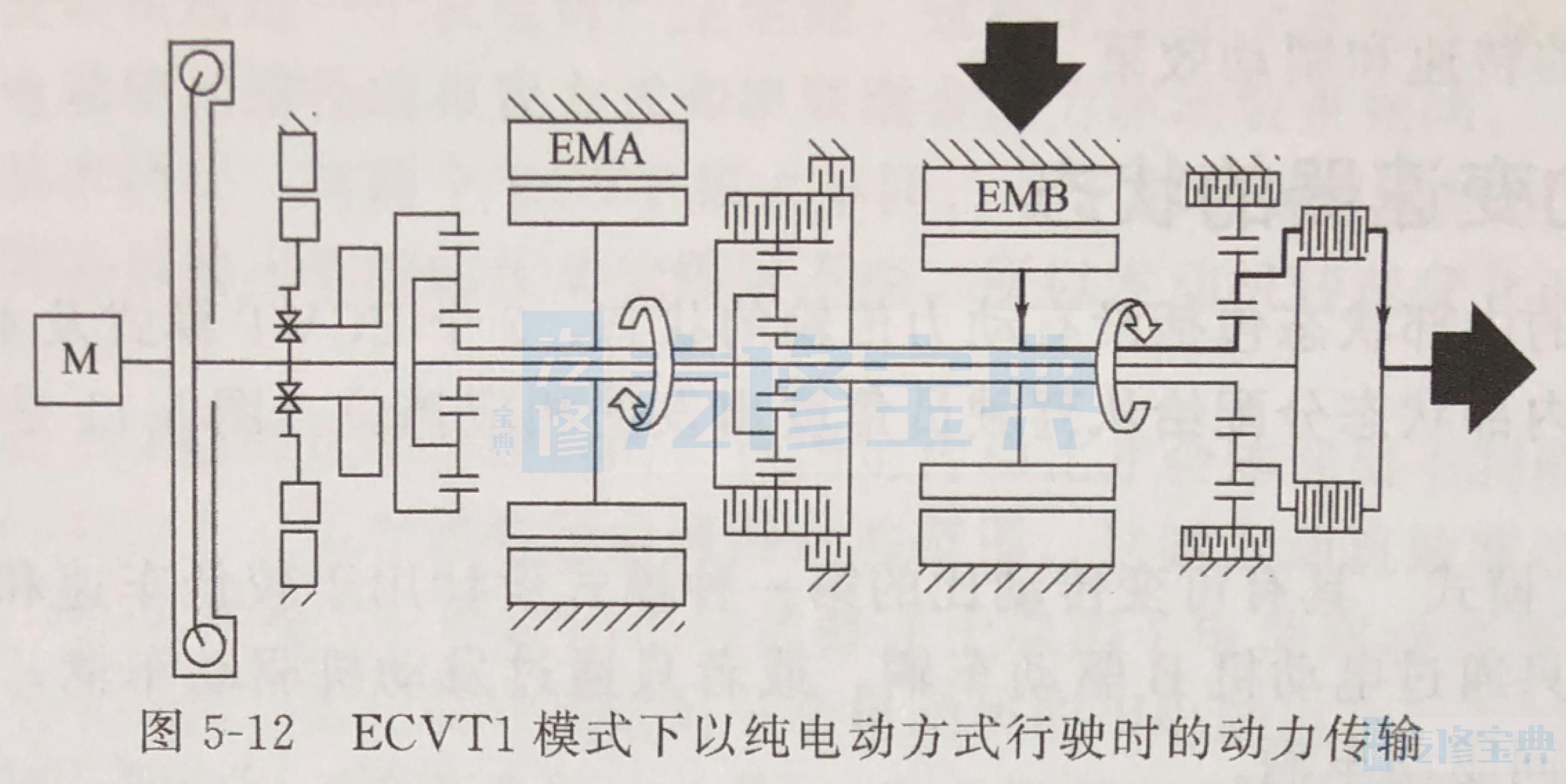
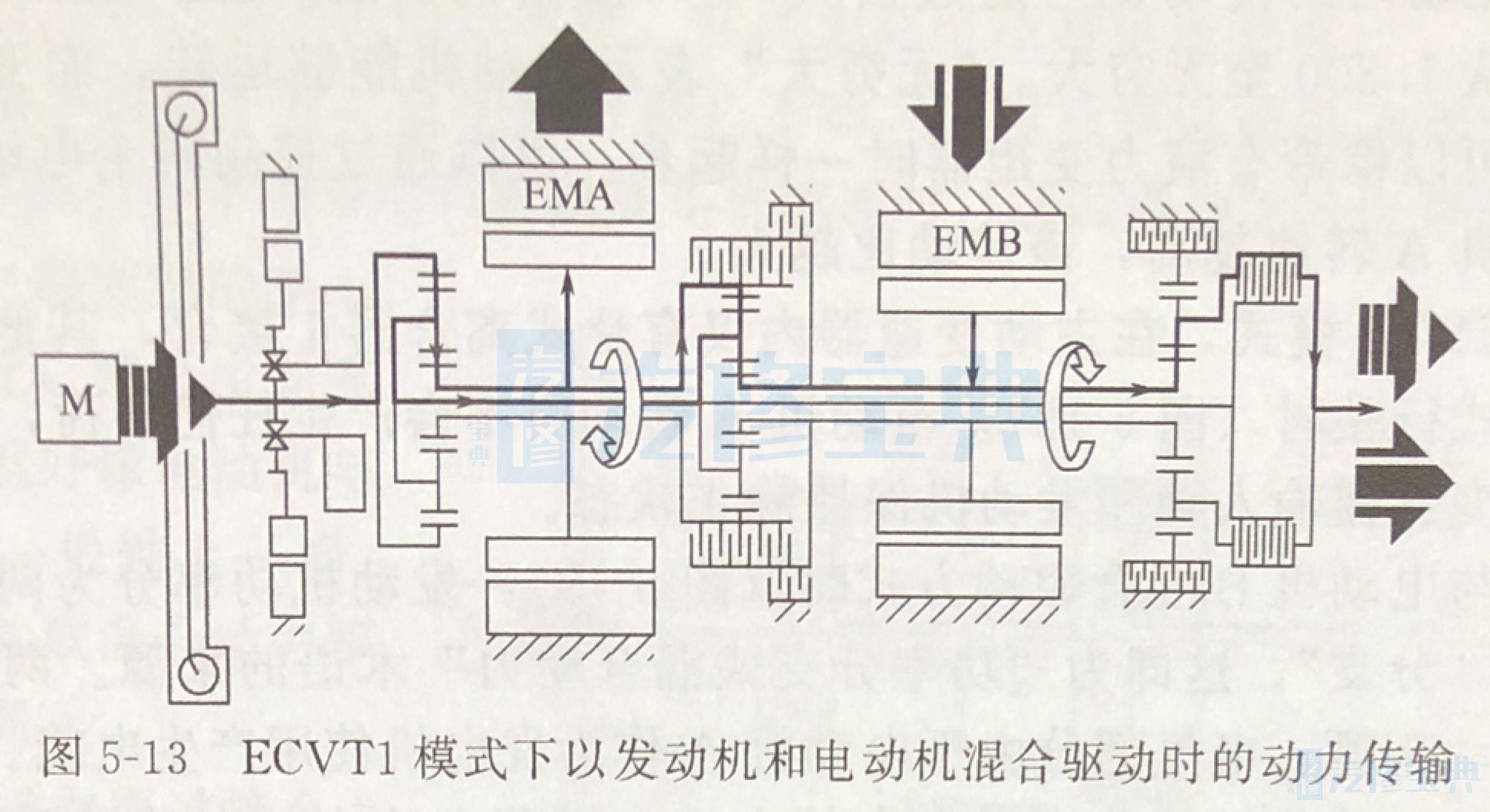
主动变速器的内部状态包括没有动力传输的状态、2个ECVT模式及4个固定的基本挡位。然后将这些内部状态分配给从驾驶员角度出发的相应挡位。图5-11是E72主动变速器的结构。 (1)ECVT1模式 具有可变传动比的第一种模式设计用于较低车速和最大牵引力。处于该模式时可以只通过电动机B驱动车辆,或者只通过发动机驱动车辆,也可以通过电动机B和发动机共同驱动车辆。 使用发动机驱动时的传动比可通过公式“i=发动机转速/变速器输出轴转速”进行计算。该传动比可从1.800至无穷大。“无穷大”表示发动机能够运转,而变速器输出轴保持静止状态。所以可以像带有液力变矩器时一样起步。可以通过控制两个电动机的转速来调整该传动比,电动机A转速越高,该传动比越大。 为了实现ECVT1模式,在主动变速器内仅有片式离合器1接合,其他片式离合器都断开。以纯电动方式行驶时(图5-12),电动机A转动时不会产生任何负荷,而电动机B则正相反。这样可使变速器输入轴和发动机保持静止状态。 采用发动机与电动机B混合驱动方式时(图5-13),发动机功率分为两个部分,也可以说发动机的功率“分支”,这即为“功率分支式混合动力”术语的来源。两个部分包括机械部分直接用于驱动车辆;电气部分由于电动机A作为发电机使用产生电能发电机产生的电能能够部分或完全存储在高电压蓄电池内。电动机B以电动机形式吸收电能。电能完全或部分来自电动机A或高电压蓄电池。各能量的大小取决于各种因素,这些能量由混合动力主控控制单元随时重新计算和调节。
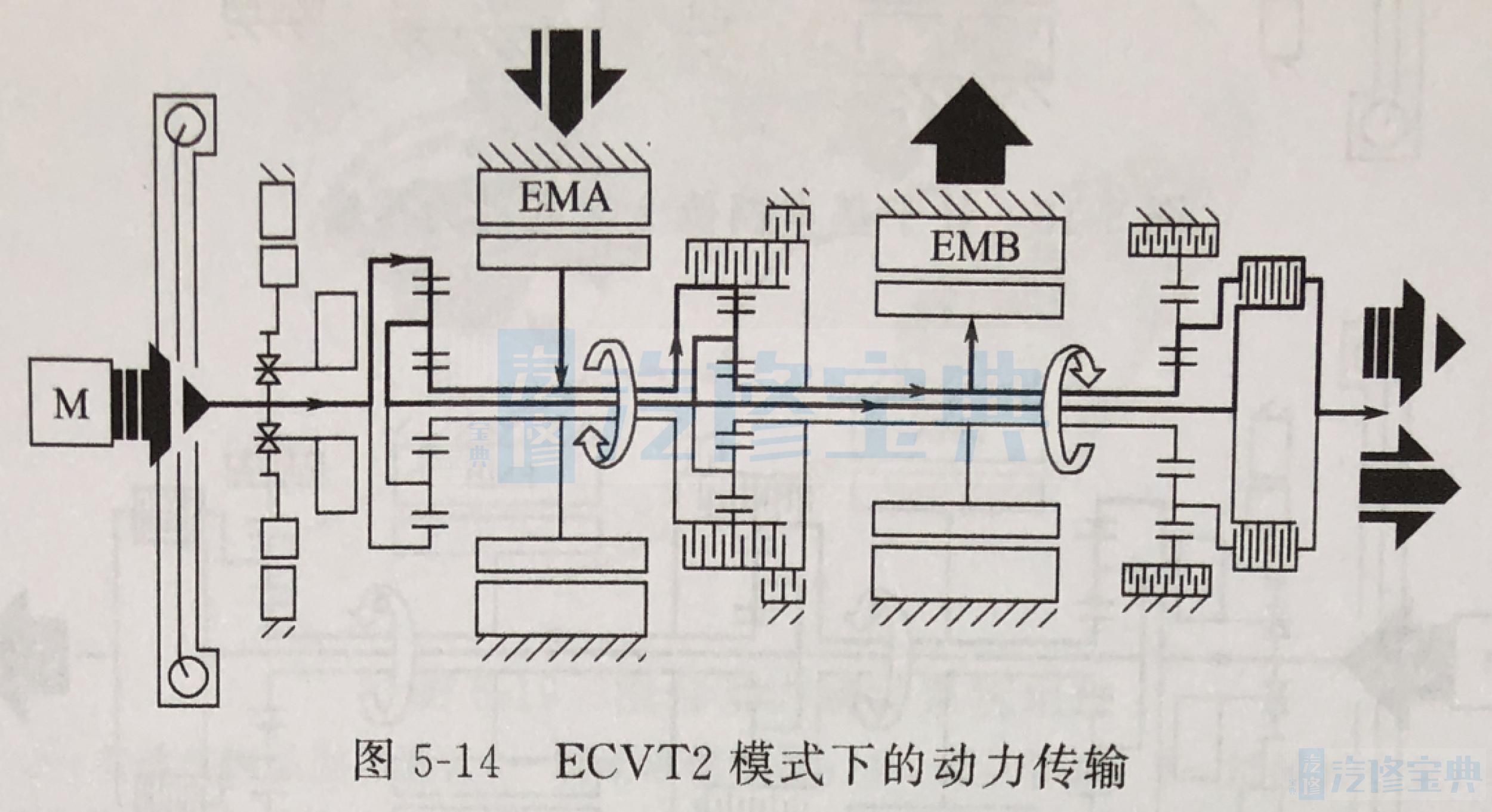
(2)ECVT2模式与第一种模式相反,第二种模式设计用于较高车速。在ECVT2模式下既能够以纯电动方式行驶,也可启动发动机行驶。发动机的传动比可在0.723~1.800的范围内调节。与ECVT1模式相同,电动机转速在此也作为控制参数。根据具体数值可以看出传动比较ECVT1模式更小,所以适于较高车速。电动机的传动比也更小,就是说,它的有效转速范围向更高速度推移。
电动机能够给发动机提供支持或用于为高电压蓄电池充电。与ECVT1模式类似,通常个电动机作为电动机运行(在此为电动机A),另一个作为发电机运行(在此为电动机B)。
在ECVT2模式下片式离合器2接合,其他片式离合器都断开(图5-14)。
在ECVT2模式下也可以通过控制能量流(考虑到总量)使高电压蓄电池充电(发动机负荷点提高)或放电(为发动机提供支持)。运行策略会在考虑最佳总效率的同时调节相应能量流。
两个ECVT模式的特点在于,除发动机机械驱动路径外还包括电动驱动路径。使用电动驱动路径时,发动机通过一个发电机产生电能,这些电能完全或部分通过一个电动机用于驱动车辆。这种电动驱动路径的布置方式和串联混合动力驱动装置相同。
(3)固定的基本挡位 与两个ECVT模式不同,对于主动变速器固定的基本挡位来说,变速器输入轴与变速器输出轴间的传动比固定不变。所以发动机转速变化时,车速也会发生相应程度的改变。
只有当发动机不在最佳效率范围内时,该固定传动比才会体现出不利的一面。但是在需要发动机高转矩的情况下,运行策略仍会选择这些范围。这时发动机效率已经处于非常好的状态。相对于ECVT模式而言,固定挡位的优势在于取消了电动驱动装置内的双重能量转换。因为通过一个电动机产生电能并通过另一个电动机使用电能也会引起相应损失。
处于固定的基本挡位时(除基本挡位4外),电动机可以无负荷旋转;作为电动机驱动,从而为发动机提供支持;作为发电机驱动,从而为高电压蓄电池充电。
处于固定的基本挡位4时,电动机B静止不动,所以只有电动机A可以灵活使用以发电机方式运行非常适合滑行阶段或车辆减速时,从而将动能转化为电能并存储到高电压蓄电池内。若忽略固定的基本挡位的不同传动比,那么主动变速器的工作状态就好像电动机与发动机安装在同一根轴上一样。
这种布置方式和并联混合动力驱动装置的完全相同。
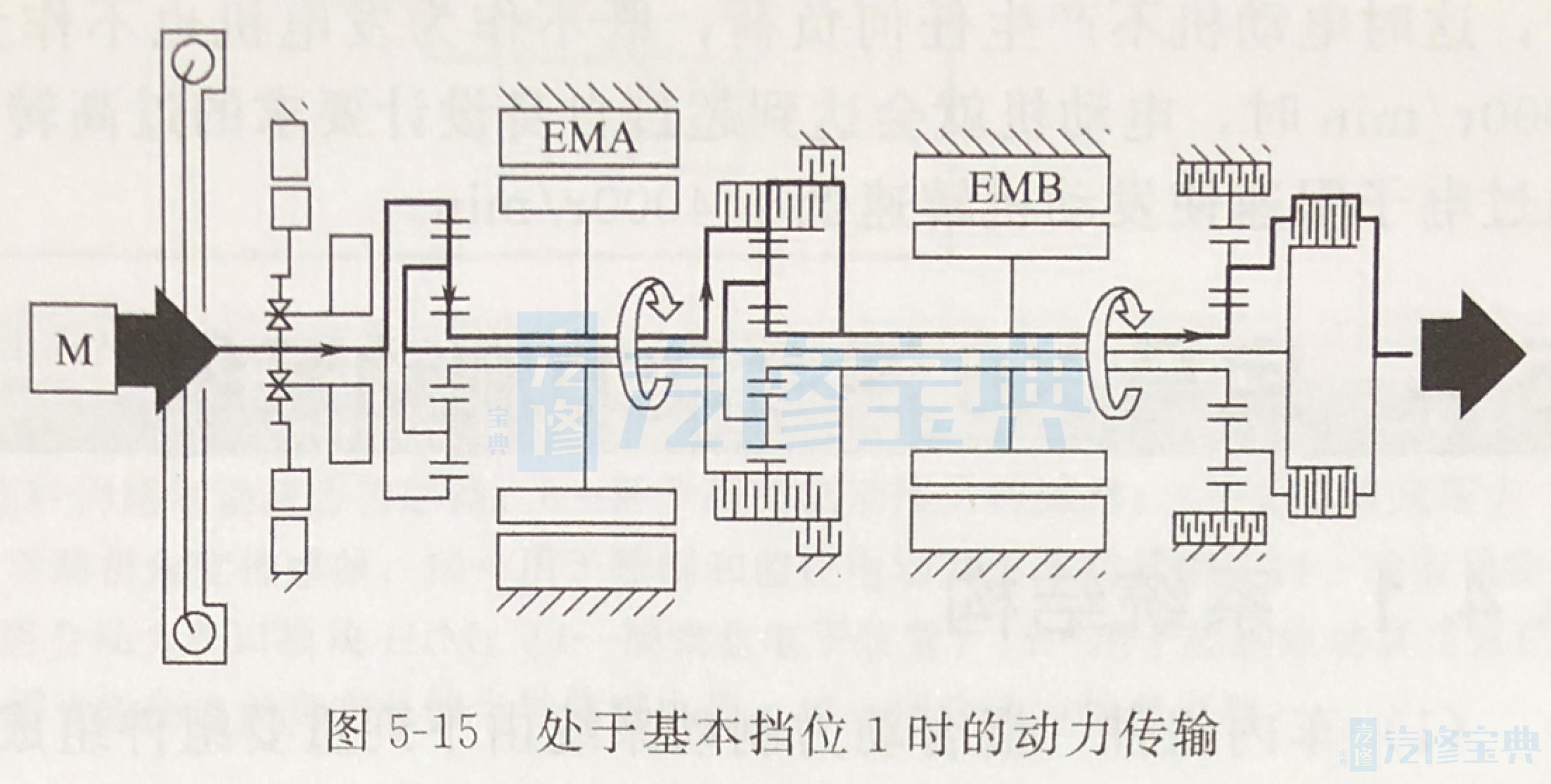
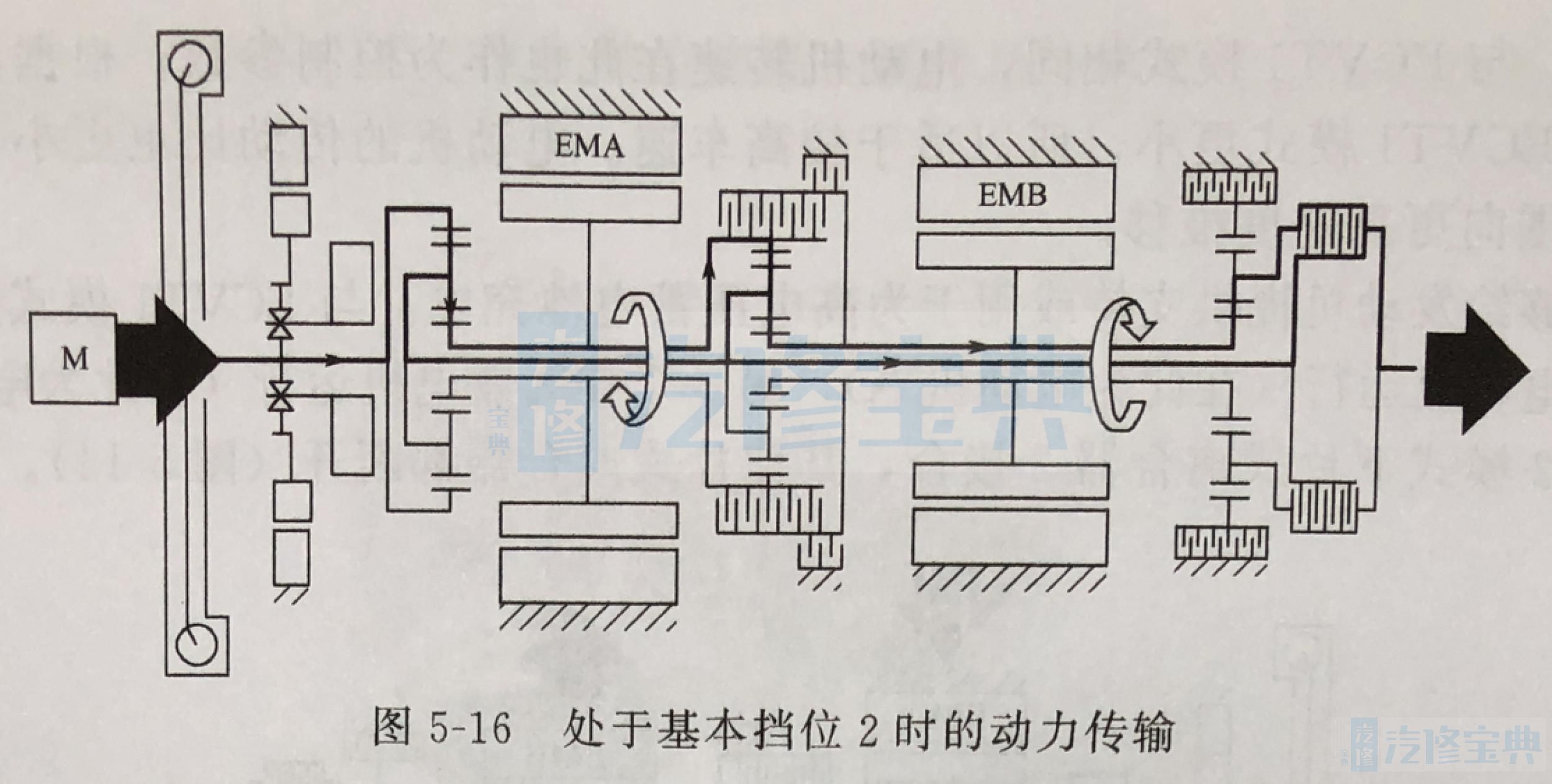
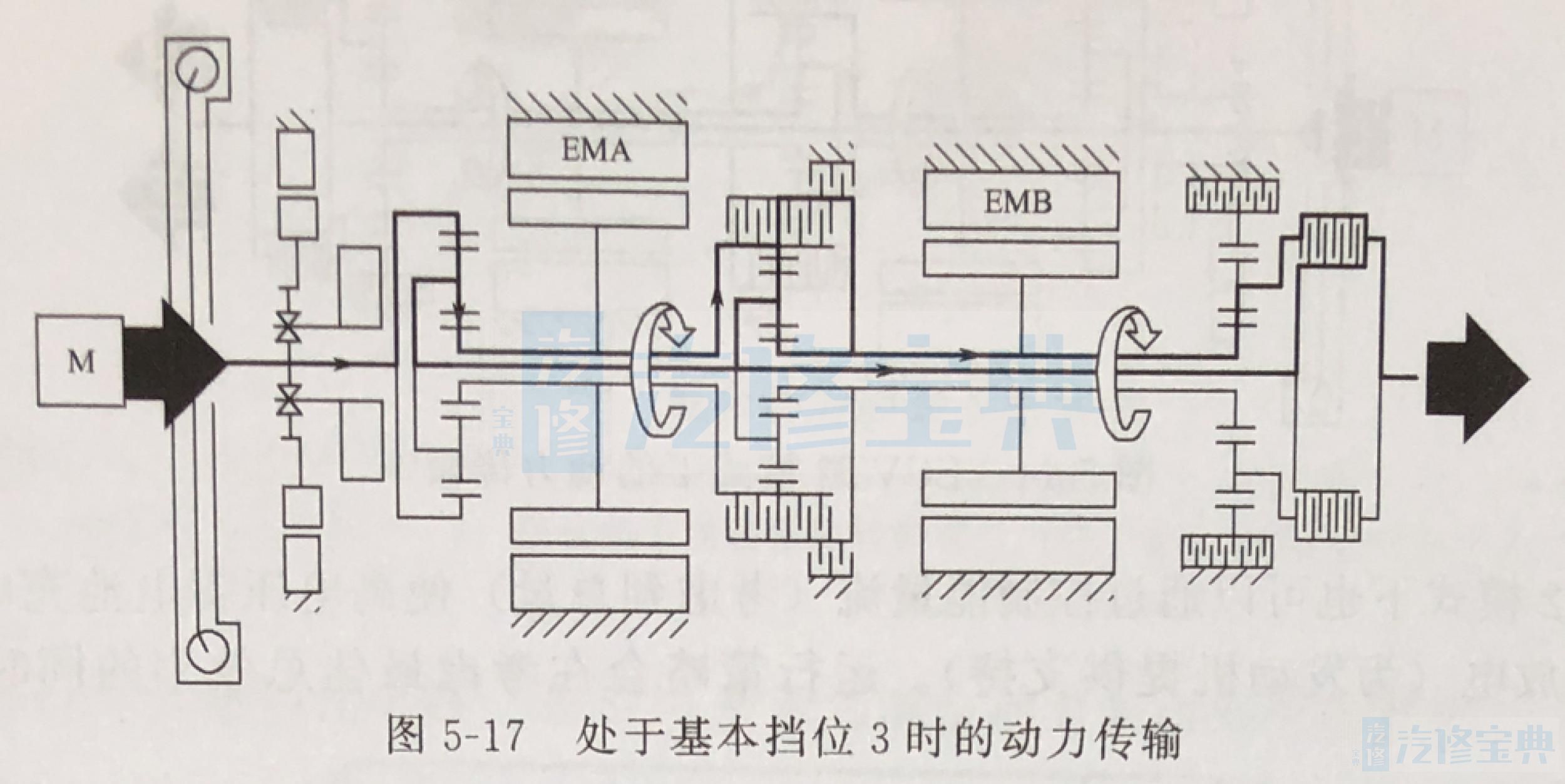
在主动变速器内通过接合2个片式离合器能够实现所有固定的基本挡位(图5-15~图5-18)。
(4)没有动力传输因为在发动机与主动变速器之间没有中央离合器,主动变速器必须提供一种在变速器输入轴与变速器输出轴之间没有动力传输的状态。这样可保证在发动机自由转动的同时车辆不会移动。相反也可以保证在车轮自由滚动的同时发动机不会输出或吸收转矩。
没有动力传输的状态通过断开4个片式离合器来实现。发动机运转时电动机也随之运转,这时电动机不产生任何负荷,既不作为发电机也不作为电动机应用。发动机转速超过4000r/min时,电动机就会达到超过自身设计要求的过高转速。所以在这种变速器状态下会通过电子限速使发动机转速低于4000r/min。