背景
车型:一辆上海通用君越,配置2.0T缸内直喷发动机。VIN:LSGGF59F1EHXXXXXX。行驶里程:23145km。
现象
车辆经过事故车维修之后, 在符合定速条件下,车辆无法定速,仪表显示“维修自适应巡航系统”(如图1所示)。并且车道偏离报警系统和前方碰撞预警系统也不工作,其他系统工作正常。
分析
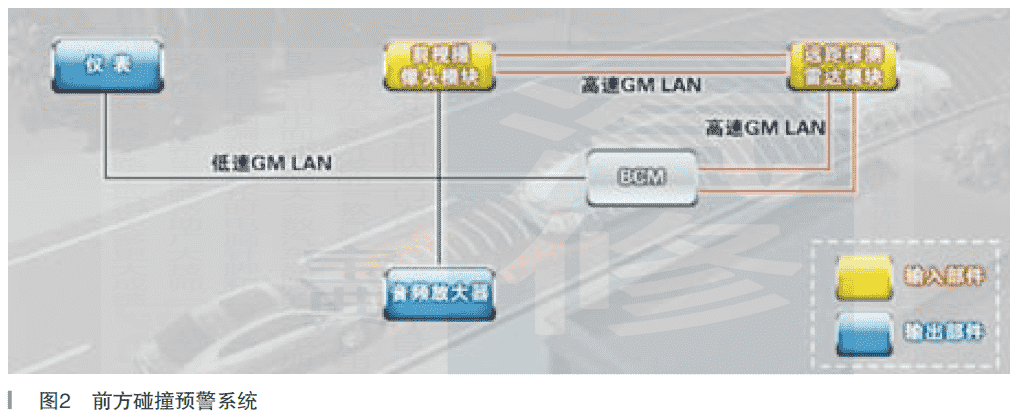
先来了解一下前方碰撞预警系统。前方碰撞预警系统的组成部件如图2所示,主要包括:前视摄像头模块、远距探测雷达模块、间距开关、仪表、音响系统。通过前视摄像头模块及远距探测雷达模块探测前方车辆,当存在碰撞风险时,该系统会向驾驶员发出警报,从而减少车辆行驶时追尾事故的发生概率。
 车道偏离报警系统:主要组成部件如图3所示。
车道偏离报警系统:主要组成部件如图3所示。
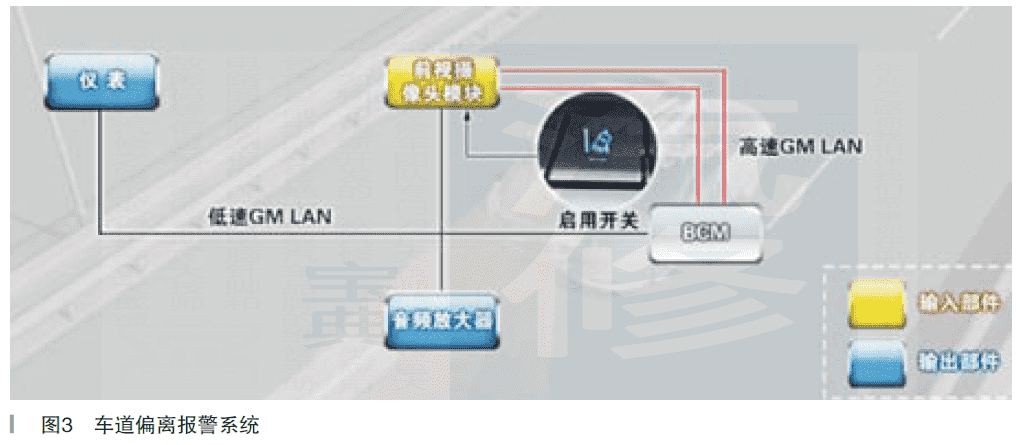 部件包括前视摄像头模块、启用/禁用开关、仪表、音响系统。安装在车内后视镜附近的前视
摄像头模块可以识别车道标记线,当系统探测到车辆偏离车道时,可提供音频报警(可以设置为打开状态或关闭状态)。只有超过一定车速时,且探测到车道标记线,车道偏离报警系
统才会工作。若转向灯开启或急转弯操作时,系统不会发出上述警告。
自适应巡航控制系统:部件组成如图4所示。
部件包括前视摄像头模块、启用/禁用开关、仪表、音响系统。安装在车内后视镜附近的前视
摄像头模块可以识别车道标记线,当系统探测到车辆偏离车道时,可提供音频报警(可以设置为打开状态或关闭状态)。只有超过一定车速时,且探测到车道标记线,车道偏离报警系
统才会工作。若转向灯开启或急转弯操作时,系统不会发出上述警告。
自适应巡航控制系统:部件组成如图4所示。
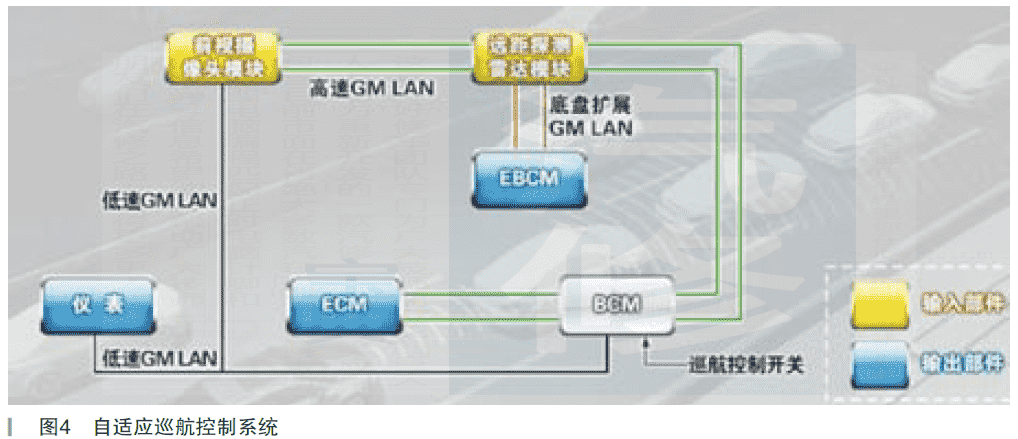 自适应巡航控制系统(ACC)是一个增强型的巡航控制系统,能够感知前进方向的交通情况并
作出反应。与许多车辆上使用的普通巡航控制系统相比,自适应巡航控制系统的主要增强功能在于,能够探测车辆前方是否有车辆存在。自适应巡航控制系统保留了已有的巡航控制功
能,能够将车速控制为驾驶员选定的车速,巡航控制车距传感器模块计算一个跟随速度极限值,以确保能够保持与前方车辆的可接受距离。当前方车辆的行驶速度变慢时,自适应巡航
控制系统会自动调整车辆的车速。在保持自适应巡航控制车辆的设置跟随车距时,自适应巡航控制系统会在无驾驶员输入信号的情况下,进行有限的自动制动和节气门控制。前方车辆
的车速和加速度、自适应巡航控制车辆的车速和加速度以及两车之间的距离,是巡航控制车距传感器模块用于确定自适应巡航控制跟随车速极限值的几大因素。当前方无车辆时,自适应巡航控制车辆在无驾驶员输入信号的情况下将加速到驾驶员最初选定的设置车速。当系统进入工作状态后,远距探测雷达模块和前视摄像头模块在设定的跟车间距内进行监测,当监
测到前方有车辆时,系统将会自动转入跟随模式,经网络向ECM及EBCM发出指令,通过控制发动机动力或制动的方式控制车速,保持车距。若前方车辆加速,本车也会随之加速,但加速的最大值为自适应巡航控制的设定车速。
自适应巡航控制系统各部件介绍:
01 巡航距离传感器控制模块(远距探测雷达模块)
巡航距离传感器控制模块含有雷达和控制器。巡航距离传感器控制模块利用雷达来识别和分类道路环境中的目标。雷达通过扫描道路环境来探测其指定视区域内的目标。然后控制器通过GMLAN串行数据电路向发动机控制模块(ECM)和电子制动控制模块(EBCM)发送节气门或制动指令,以根据雷达数据控制车辆加速或减速。发动机控制模块和电子制动控制模块则提供正确巡航速度调整所需的节气门控制和自动制动。
02 车身控制模块(BCM)
车身控制模块为高速GMLAN串行数据电路提供转换网关。车身控制模块读取所有巡航控制开关和车距开关数据。巡航控制车距传感器模块通过经由GMLAN串行数据电路传输的车身控制模块开关状态信息监测各种用户操作开关。在自动制动过程中,车身控制模块根据来自于巡航控制车距传感器模块的GMLAN信息点亮制动灯。车身控制模块测量制动踏板的位置,并将制动踏板行程状态通过GMLAN串行数据电路发送给发动机控制模块。当驾驶员踩下制动踏板制动后,发动机控制模块将断开自适应巡航控制系统。车身控制模块可以作为组合仪表和驾驶员信息中心的一种网关。车身控制模块将根据巡航控制车距传感器模块发送的高速GMLAN串行数据信息产生可视警告。
03 发动机控制模块(ECM)
发动机控制模块为自适应巡航控制系统提供电子节气门控制。发动机控制模块处理所收到的车身控制模块通过GMLAN串行数据电路发送的巡航控制请求。自适应巡航控制系统的启用和断开由发动机控制模块执行。发动机控制模块允许在未断开自适应巡航控制系统的情况下自动制动。
04 电子制动力控制模块(EBCM)
电子制动控制模块控制防抱死制动系统的运行。电子制动控制模块为自适应巡航控制系统提供自动制动功能。巡航控制车距传感器模块将通过高速GMLAN串行数据电路请求车辆减速。当驾驶员踩下加速踏板来操控节气门时,电子制动控制模块将释放车辆自动制动装置。
电子制动控制模块将预测制动温度。由于自动制动,制动系统可能会过热。当制动器过热时,电子制动控制模块请求发动机控制模块暂时关闭自适应巡航控制系统,直到制动器冷却到正常的工作温度。
05 变速器控制模块 (TCM)
变速器控制模块 (TCM)提供降速换挡来保护制动器。当变速器控制模块检测到驾驶员的制动动作或自适应巡航控制系统的自动制动动作时,变速器控制模块将降低车辆变速器的挡位来增大发动机的制动力。从而有助于减小制动动作,延长制动片的使用寿命,并减轻制动系统的过热情况。
06 驾驶员信息中心
驾驶员信息中心是组合仪表的一部分,能够显示自适应巡航控制系统的警告消息。巡航距离传感器模块通过向车身控制模块发送一个GMLAN请求,要求在驾驶员信息中心上显示消息。车身控制模块向组合仪表发送一个GMLAN串行数据请求,要求显示警告消息。如果驾驶员已获知了该消息并且问题已得到了解决,驾驶员信息中心将关闭该消息。如果驾驶员信息中心出现故障,则自适应巡航控制系统将不会运行。
自适应巡航控制系统(ACC)是一个增强型的巡航控制系统,能够感知前进方向的交通情况并
作出反应。与许多车辆上使用的普通巡航控制系统相比,自适应巡航控制系统的主要增强功能在于,能够探测车辆前方是否有车辆存在。自适应巡航控制系统保留了已有的巡航控制功
能,能够将车速控制为驾驶员选定的车速,巡航控制车距传感器模块计算一个跟随速度极限值,以确保能够保持与前方车辆的可接受距离。当前方车辆的行驶速度变慢时,自适应巡航
控制系统会自动调整车辆的车速。在保持自适应巡航控制车辆的设置跟随车距时,自适应巡航控制系统会在无驾驶员输入信号的情况下,进行有限的自动制动和节气门控制。前方车辆
的车速和加速度、自适应巡航控制车辆的车速和加速度以及两车之间的距离,是巡航控制车距传感器模块用于确定自适应巡航控制跟随车速极限值的几大因素。当前方无车辆时,自适应巡航控制车辆在无驾驶员输入信号的情况下将加速到驾驶员最初选定的设置车速。当系统进入工作状态后,远距探测雷达模块和前视摄像头模块在设定的跟车间距内进行监测,当监
测到前方有车辆时,系统将会自动转入跟随模式,经网络向ECM及EBCM发出指令,通过控制发动机动力或制动的方式控制车速,保持车距。若前方车辆加速,本车也会随之加速,但加速的最大值为自适应巡航控制的设定车速。
自适应巡航控制系统各部件介绍:
01 巡航距离传感器控制模块(远距探测雷达模块)
巡航距离传感器控制模块含有雷达和控制器。巡航距离传感器控制模块利用雷达来识别和分类道路环境中的目标。雷达通过扫描道路环境来探测其指定视区域内的目标。然后控制器通过GMLAN串行数据电路向发动机控制模块(ECM)和电子制动控制模块(EBCM)发送节气门或制动指令,以根据雷达数据控制车辆加速或减速。发动机控制模块和电子制动控制模块则提供正确巡航速度调整所需的节气门控制和自动制动。
02 车身控制模块(BCM)
车身控制模块为高速GMLAN串行数据电路提供转换网关。车身控制模块读取所有巡航控制开关和车距开关数据。巡航控制车距传感器模块通过经由GMLAN串行数据电路传输的车身控制模块开关状态信息监测各种用户操作开关。在自动制动过程中,车身控制模块根据来自于巡航控制车距传感器模块的GMLAN信息点亮制动灯。车身控制模块测量制动踏板的位置,并将制动踏板行程状态通过GMLAN串行数据电路发送给发动机控制模块。当驾驶员踩下制动踏板制动后,发动机控制模块将断开自适应巡航控制系统。车身控制模块可以作为组合仪表和驾驶员信息中心的一种网关。车身控制模块将根据巡航控制车距传感器模块发送的高速GMLAN串行数据信息产生可视警告。
03 发动机控制模块(ECM)
发动机控制模块为自适应巡航控制系统提供电子节气门控制。发动机控制模块处理所收到的车身控制模块通过GMLAN串行数据电路发送的巡航控制请求。自适应巡航控制系统的启用和断开由发动机控制模块执行。发动机控制模块允许在未断开自适应巡航控制系统的情况下自动制动。
04 电子制动力控制模块(EBCM)
电子制动控制模块控制防抱死制动系统的运行。电子制动控制模块为自适应巡航控制系统提供自动制动功能。巡航控制车距传感器模块将通过高速GMLAN串行数据电路请求车辆减速。当驾驶员踩下加速踏板来操控节气门时,电子制动控制模块将释放车辆自动制动装置。
电子制动控制模块将预测制动温度。由于自动制动,制动系统可能会过热。当制动器过热时,电子制动控制模块请求发动机控制模块暂时关闭自适应巡航控制系统,直到制动器冷却到正常的工作温度。
05 变速器控制模块 (TCM)
变速器控制模块 (TCM)提供降速换挡来保护制动器。当变速器控制模块检测到驾驶员的制动动作或自适应巡航控制系统的自动制动动作时,变速器控制模块将降低车辆变速器的挡位来增大发动机的制动力。从而有助于减小制动动作,延长制动片的使用寿命,并减轻制动系统的过热情况。
06 驾驶员信息中心
驾驶员信息中心是组合仪表的一部分,能够显示自适应巡航控制系统的警告消息。巡航距离传感器模块通过向车身控制模块发送一个GMLAN请求,要求在驾驶员信息中心上显示消息。车身控制模块向组合仪表发送一个GMLAN串行数据请求,要求显示警告消息。如果驾驶员已获知了该消息并且问题已得到了解决,驾驶员信息中心将关闭该消息。如果驾驶员信息中心出现故障,则自适应巡航控制系统将不会运行。
方案
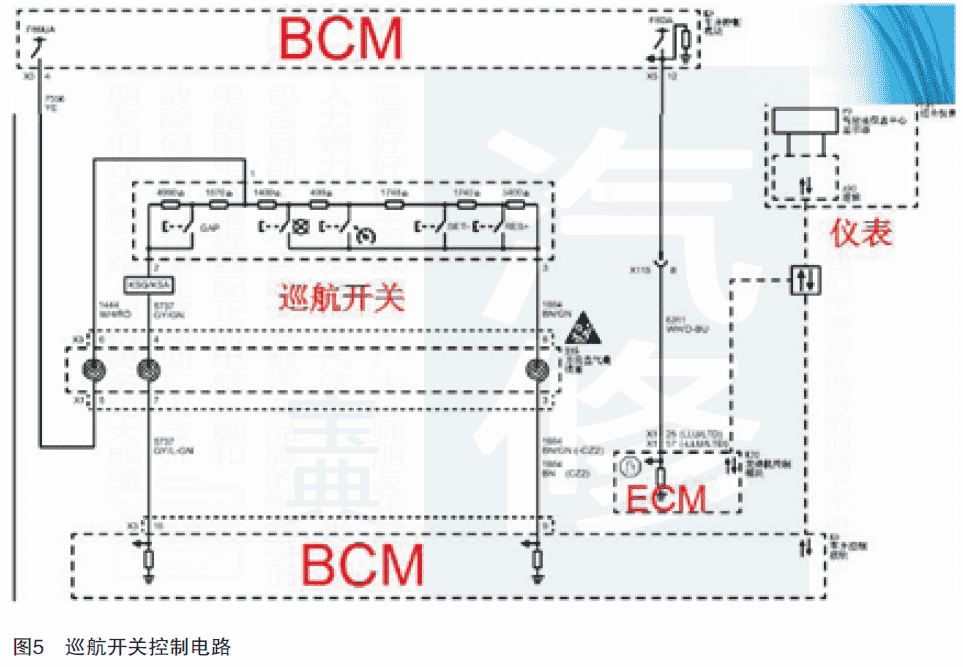
根据电路图(如图5所示)和自适应巡航工作原理分析,发动机控制模块ECM和电子制动力EBCM控制自适应巡航。用GDS2检测发动机控制模块和电子制动力模块,没有故障码储存。
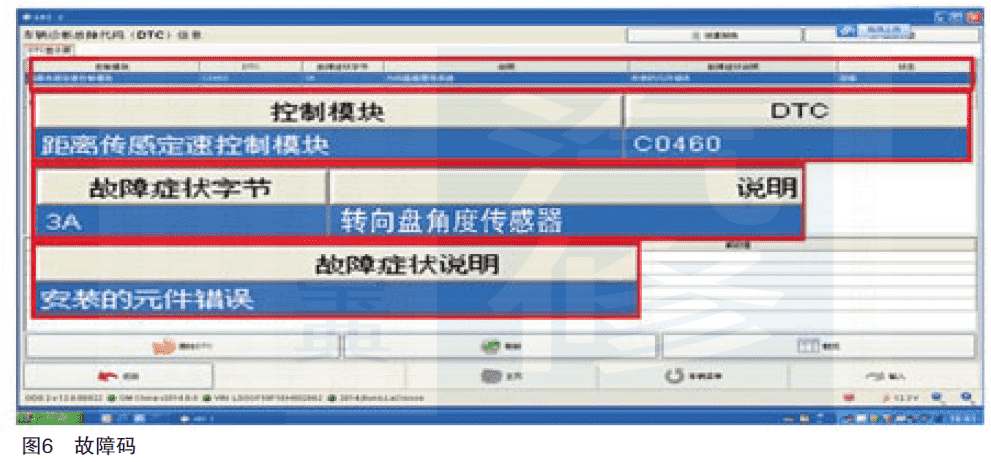
 对所有的系统进行全面检查,最后发现巡航距离传感器控制模块内有故障码储存,故障码为“C0460-3A 转向盘转角传感器安装元件错误”(如图6所示)。
对所有的系统进行全面检查,最后发现巡航距离传感器控制模块内有故障码储存,故障码为“C0460-3A 转向盘转角传感器安装元件错误”(如图6所示)。
 转向角传感器总成因事故损坏已更换新件,马上与配件库确认此配件是否与此车相符。配件库工作人员称,此配件专门给此车订购,配件号按其底盘号订购,配件绝对没有错误。
巡航距离传感器因事故损坏已更换。查找维修通信,依照维修通信的安装步骤和注意事项,再一次正确安装巡航距离传感器前雷达模块,并进行编程和设定。编程完成后,故障依旧。测试巡航距离传感器模块、车身BCM、发动机ECM之间的通信线路匀正常,不存在短路和断路故障。
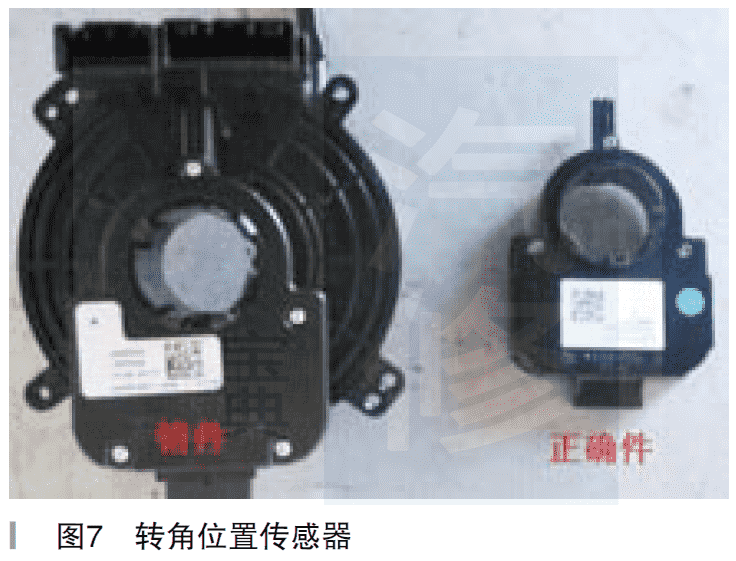
再一次检查转向角传感器(如图7 所示),发现新件的零件号为“13579709”,而旧件的配件号为“13589991”,两个配件号明显的不同。
转向角传感器总成因事故损坏已更换新件,马上与配件库确认此配件是否与此车相符。配件库工作人员称,此配件专门给此车订购,配件号按其底盘号订购,配件绝对没有错误。
巡航距离传感器因事故损坏已更换。查找维修通信,依照维修通信的安装步骤和注意事项,再一次正确安装巡航距离传感器前雷达模块,并进行编程和设定。编程完成后,故障依旧。测试巡航距离传感器模块、车身BCM、发动机ECM之间的通信线路匀正常,不存在短路和断路故障。
再一次检查转向角传感器(如图7 所示),发现新件的零件号为“13579709”,而旧件的配件号为“13589991”,两个配件号明显的不同。
 怀疑转向角传感器与实车不符,询问配件部门新旧件为什么不同,配件人员肯定的回答,两个件可以互相替代。
在电子制动控制模块中查看转向盘转向角位置传感的数据,打转向盘的角度与GDS上的数据流中的转向角度相同,转向盘转向角传感器正常。转向盘转向角传感器的嫌疑又被排除。故障原因究竟在哪里?维修陷入了僵局。
重新梳理维修过程,所有的线路检测正常,测试数据也正常。但是巡航距离传感器控制模块中还是报“C0460-3A 转向盘转角传感器安装元件错误”的故障码。经过测试诊断后,又回到原点。把一辆相同的正常车的转向盘转角位置传感器换到故障车上,试车故障排除。
再次和配件库核对该部件是否与此车相符。配件人员请教了配件技术专家,仔细查询订购系统,发现两个件不能通用,新件是用于液压助力的车上的,不是用于电子转向助力的车,车型的RPO码弄错了。
怀疑转向角传感器与实车不符,询问配件部门新旧件为什么不同,配件人员肯定的回答,两个件可以互相替代。
在电子制动控制模块中查看转向盘转向角位置传感的数据,打转向盘的角度与GDS上的数据流中的转向角度相同,转向盘转向角传感器正常。转向盘转向角传感器的嫌疑又被排除。故障原因究竟在哪里?维修陷入了僵局。
重新梳理维修过程,所有的线路检测正常,测试数据也正常。但是巡航距离传感器控制模块中还是报“C0460-3A 转向盘转角传感器安装元件错误”的故障码。经过测试诊断后,又回到原点。把一辆相同的正常车的转向盘转角位置传感器换到故障车上,试车故障排除。
再次和配件库核对该部件是否与此车相符。配件人员请教了配件技术专家,仔细查询订购系统,发现两个件不能通用,新件是用于液压助力的车上的,不是用于电子转向助力的车,车型的RPO码弄错了。
备注
此故障原因是安装的配件错误,与此车不符。它成为疑难故障在于,第一次咨询配件,配件说为此车订购,不会错。第二次配件说两个件可以通用。配件人员在出现问题后,没有及时的核对,敷衍了事,造成了不必要的麻烦。
配件人员要加强技术能力和责任心,否则订错件不但给维修造成麻烦,而且还会造成配件积压。
再一次证明配件是新的,不一定是好的。所以替换件最好是选用正常车上的。









