1.车辆中心对称面( longitudinal center plane)如图1-74中的A所示,车辆中心对称面是汽车几何中心平面,它垂直于行驶平面并通过前后轴的轮距中点,它是后轴前束的测量基准,在定位仪的调整前检测中,第一次打正方向盘时测出。 2.车辆的几何轴线(推力线)—( geometrical axis①车轮中心线是轮胎上对车轮轴垂直的中心线(图1-75)。
②几何轴线是后轴总前束的角平分线(后轴的前束是以前面中心对称面为基准测出的)。
用途:几何轴线由后轴前束决定,它是车辆行驶时的推力线,也是前轴前束的测量基准。
3.车辆的驱动偏角( geometrical angle)如图1-76所示,驱动偏角是车辆中心对称面与几何轴线所形成的夹角。驱动偏角是由后轴的前束、横向偏移和斜向偏位产生的,汽车按照几何轴线方向行驶。
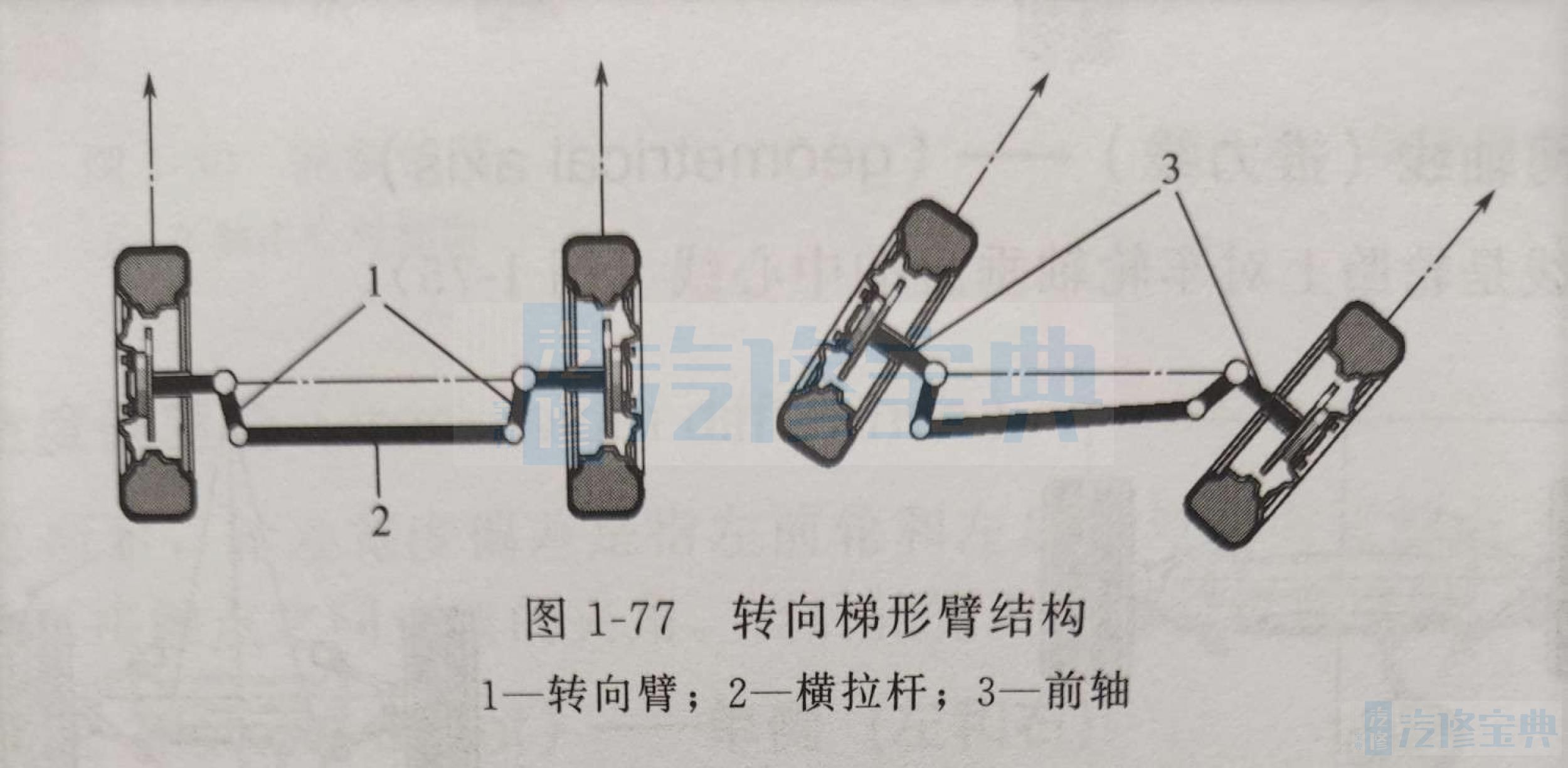
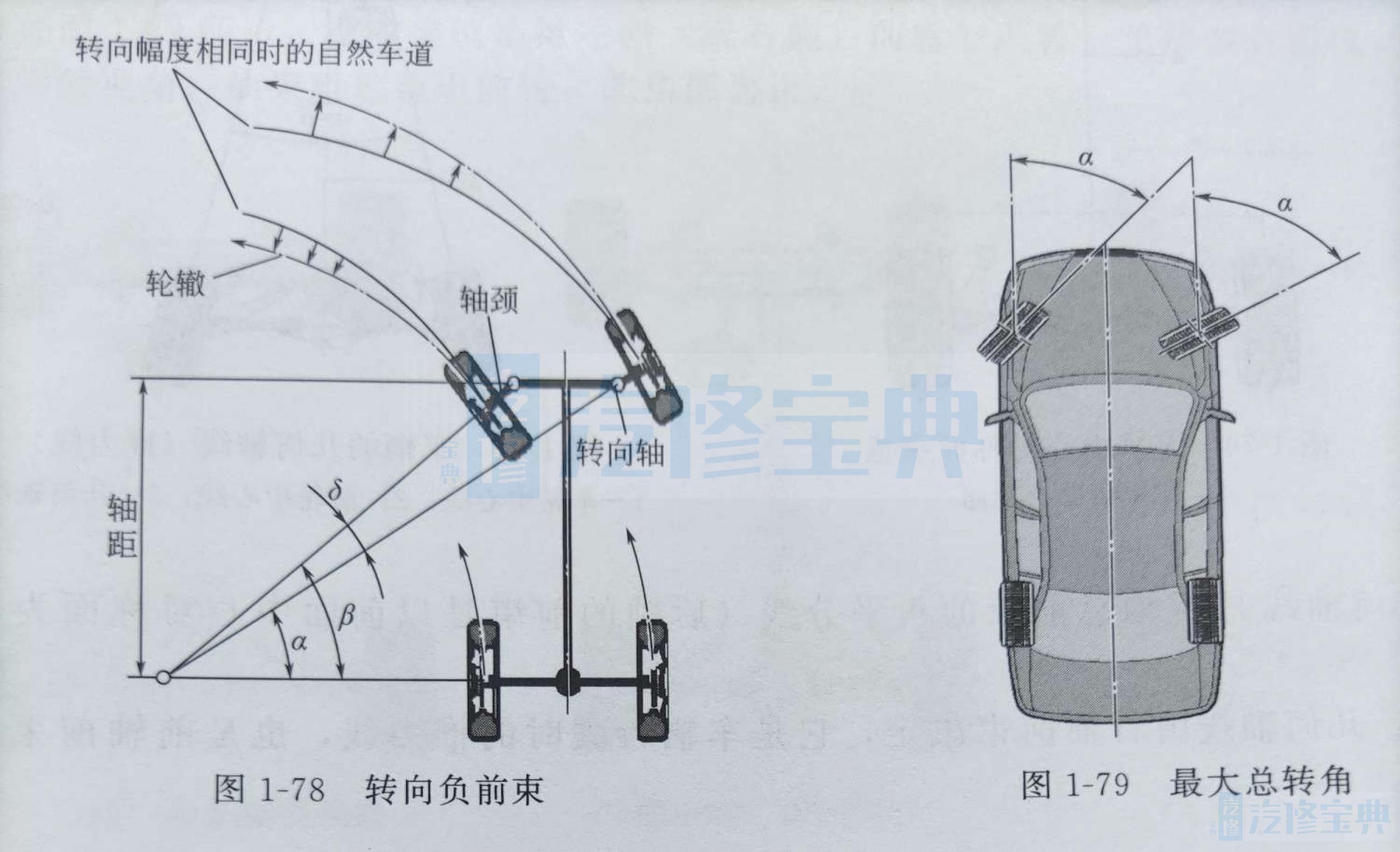
4.转向时负前束( toe-out on turns)如图1-77所示,前轴3、转向臂1和横拉杆2一起组成转向梯形臂。它可以在转向时形成不同的转向角。车辆直线行驶时,横拉杆平行于前轴,转向时横拉杆不再平行于前轴。如图1-78所示,转向时负前束是指转向时内轮相对外轮的前束差值。实际数值在左右20转向时测得。转向负前束表示当向左右转向时,转向梯形臂的工作状态。通过转向时负前束的测量值,可以判断梯形是否变形。
5.最大总转角( maximum steering lock)如图1-79所示,最大总转角是分别向左右最大转向时,内侧车轮和外侧车轮中心线与车辆中心线的夹角。通过左右的最大转向角可以判断车辆的横拉杆即球头工作是否正常。通过电子转角盘测出此角度。如果电子转角盘损坏,该角度不能被测量。