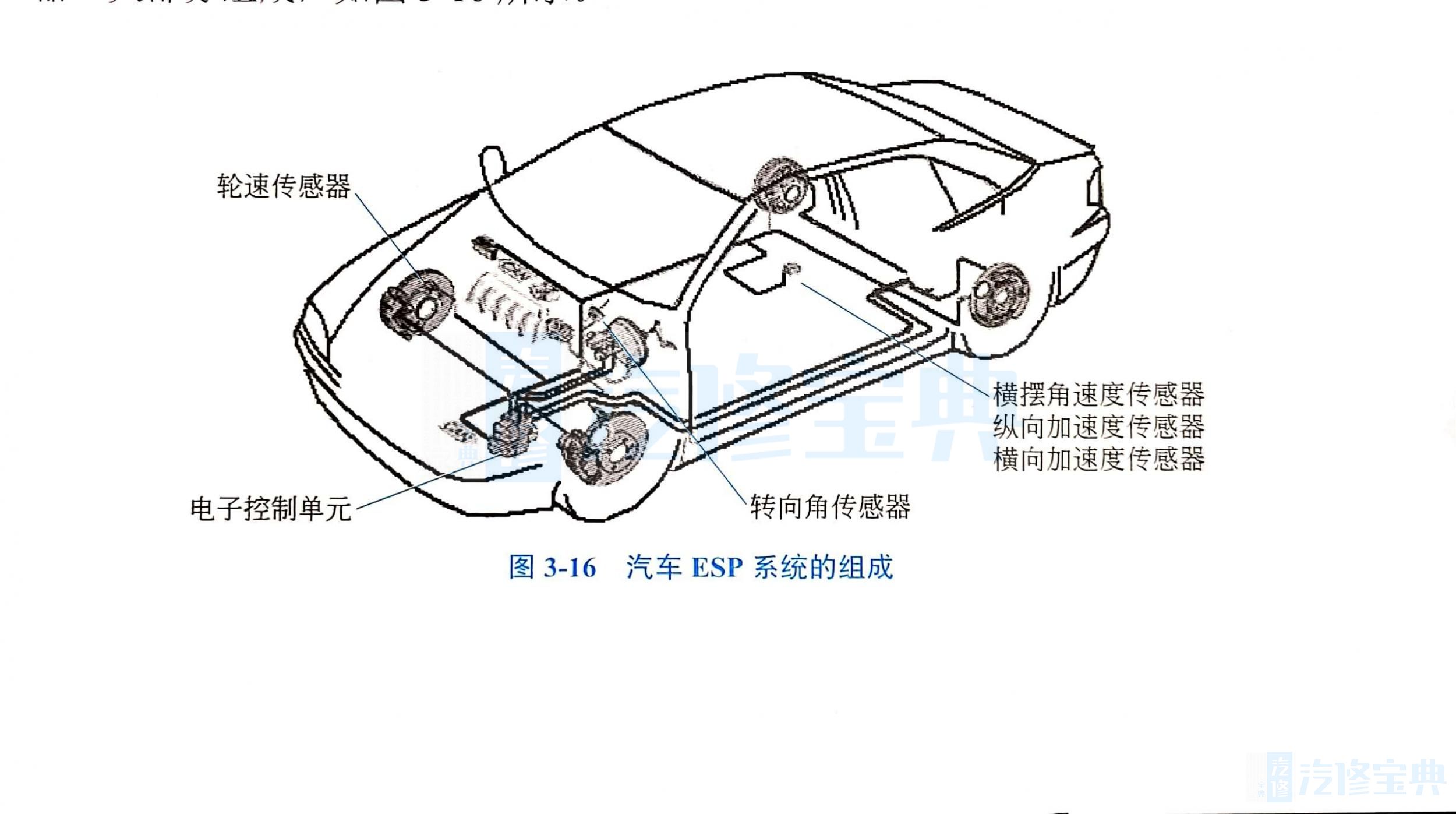
汽车ESP系统是汽车新型的主动安全系统,是汽车 ABS/ASR系统功能的进步扩展。它采用车载在线传感系统对汽车行驶的纵向/侧向/横摆运动状态、车轮运动状态、发动机工作状态、自动变速器工作状态、制动工作状态以及驾驶员转向意图等进行自动识别,判断汽车是否发生车轮抱死、驱动轮滑转及丧失操纵稳定性,进而对发动机转矩、变速器挡位和驱动轮制动进行综合协调控制,实现制动工况下车轮防抱死和稳定性控制、驱动工况下驱动轮防滑和稳定性控制以及转向工况下稳定性控制,即实现对汽车与地面的纵向和侧向动力学的综合控制使汽车的操纵稳定性、加速性和制动性实现综合最佳汽车ESP系统以ABS为基础,由各种传感器、电子控制单元(ECU)和执行器三大部分组成,如图3-16所示。
汽车ESP系统中的传感器主要包括转向角传感器、轮速传感器、纵向加速度传感器、侧向加速度传感器、横摆角速度传感器、制动压力传感器等,采用这些传感器采集汽车行驶状况的各种信息。转向角传感器的任务是判定转向角度,测量车辆转向轮的位置,这一数据与车辆速度、理想的制动压力或者加速器的位置结合起来能够计算出驾驶员的目标动作;轮速传感器测量车轮的转速:横摆角速度传感器记录车轮绕垂直轴线的横向运动,结合来自集成在一起的侧向加速度传感器的信息,车辆的状态及其是否与驾驶员的意图一致可以得到判定。横摆角速度传感器、纵向加速度传感器和横向加速度传感器通常集成化为一体。
ECU接收上述各传感器的信号,然后进行分析、判断、计算从而得出汽车的运动状态,进而发出控制指令,控制一个或多个车轮制动器的制动力,使汽车按照驾驶员所期望的理想路线行驶。
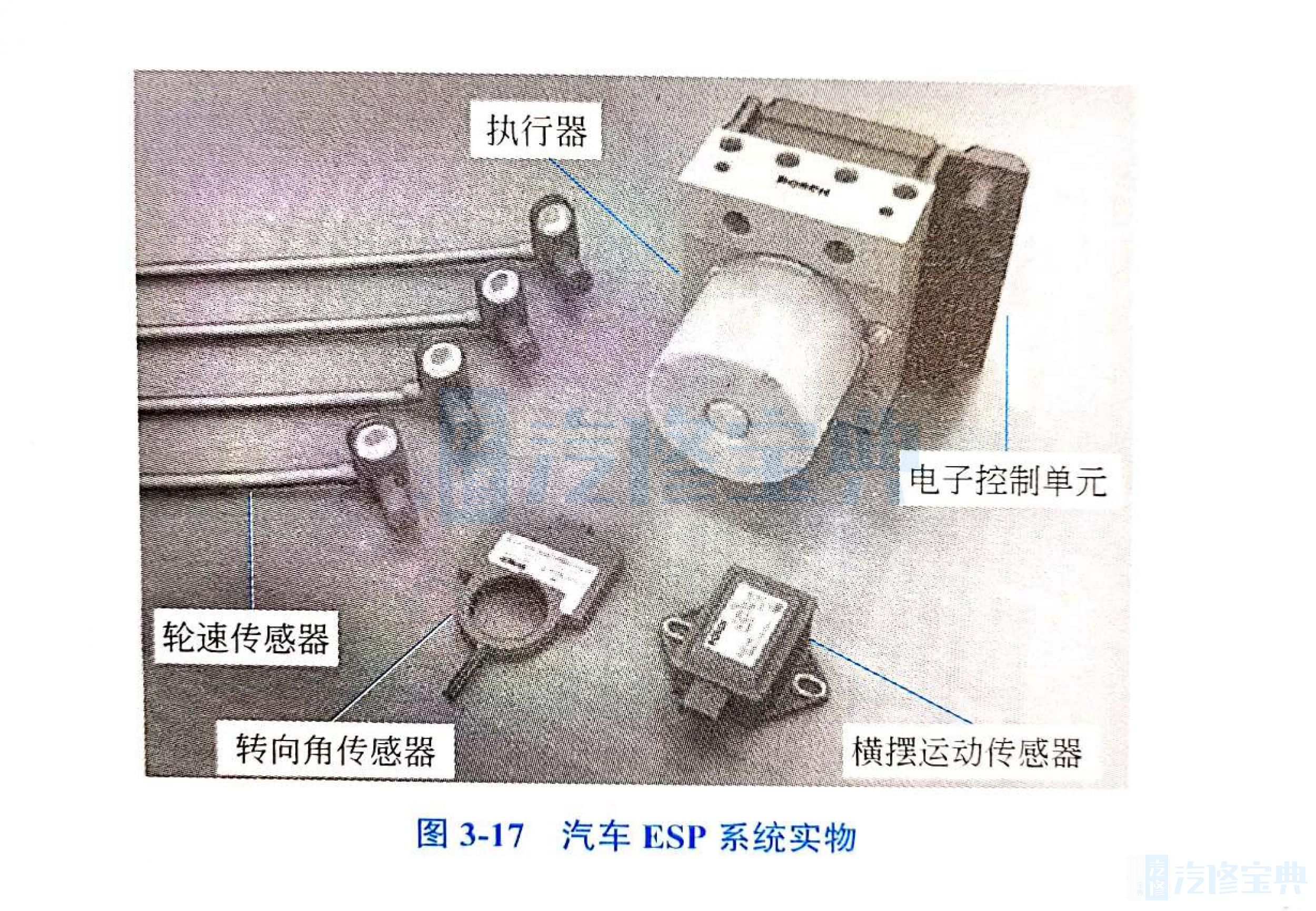
执行器接收ECU发出的命令信号,同时执行控制信号汽车ESP系统实物如图3-17所示。