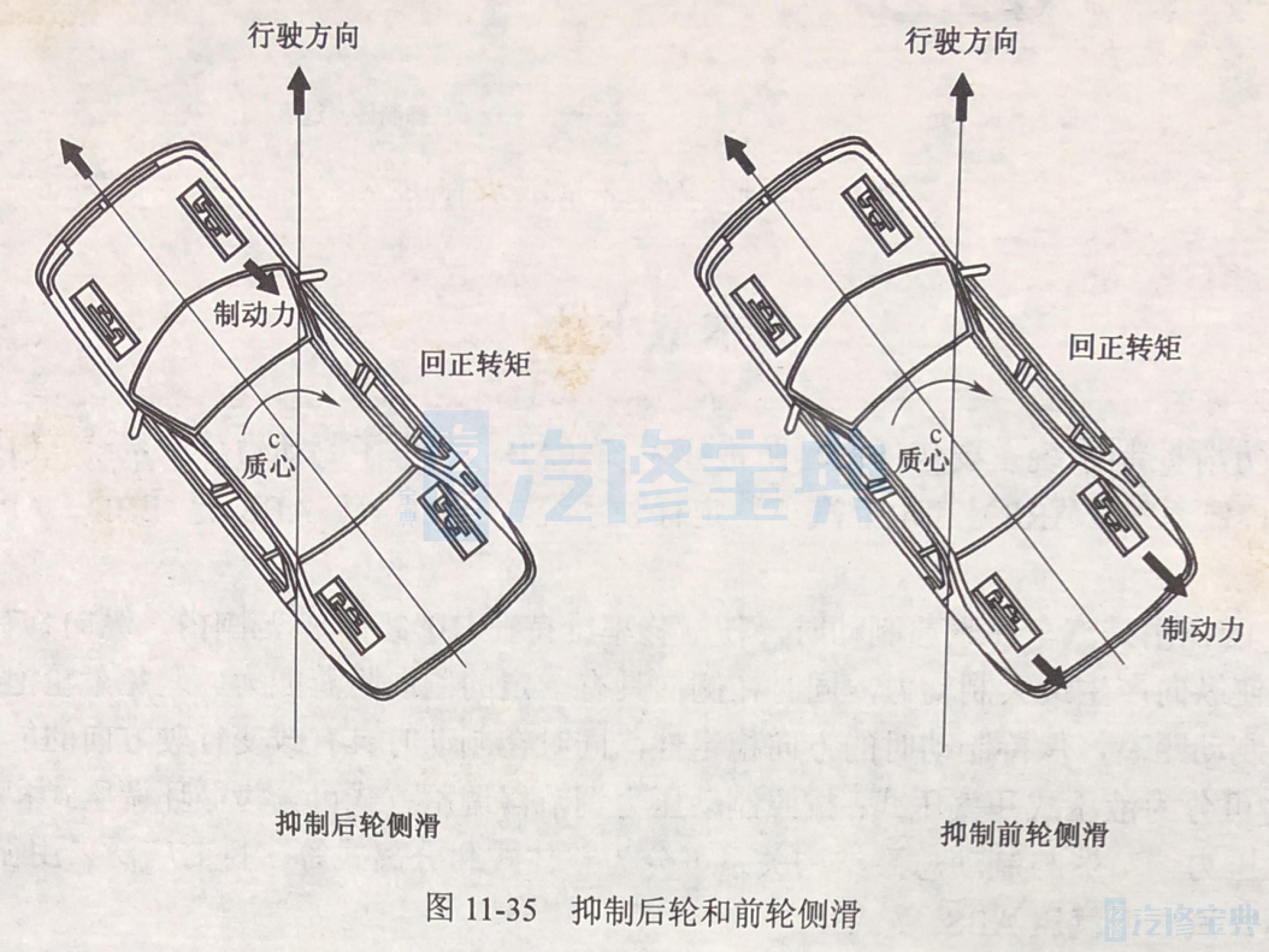
(1)抑制后轮侧滑。当汽车在弯道上或湿滑的路面上高速行驶时,因地面的原因,附着力变化无常时,后轮会产生侧滑,使汽车横向甩尾。ESP系统立即把制动力施加到转弯的外前轮上,使汽车产生相反的回正力矩,恢复直线行驶,参见图11-35。
(2)抑制前轮侧滑。同理,前轮也会产生侧滑,使汽车横向漂出。ESP系统立即把制动力施加到两个非驱动的后轮上,使汽车产生相反的回正力矩,恢复直线行驶,参见图11-32。
因前轮为驱动轮,应使后轮采用先拉后摆的办法恢复直行,对两后轮还可以用占空比方式调节制动力的大小。
(3)抑制转向不足。汽车高速行驶出现障碍物时,驾驶员向左急转向,但惯性力是向前的,与转向轮方向不一致,会出现转向不足状态,ESP系统立即制动左后轮(内弧线后轮),生向左的转矩,迅速向左转向,消除转向不足状态,参见图11-36。
(4)抑制转向过度。当汽车向左急转向绕过障碍物后,绕过了障碍物后,需急速向右转向恢复直线行驶,ESP系统立即制动右前轮(内弧线前轮),恢复直行状态。当惯性分力较大时,会使汽车产生转向过度状态,严重时会造成向左甩尾现象。ESP系统又立即制动左前轮(外弧线前轮),产生向左的转矩,消除转向过度,使汽车平稳的回到直线行驶状态,抑制了转向过度。