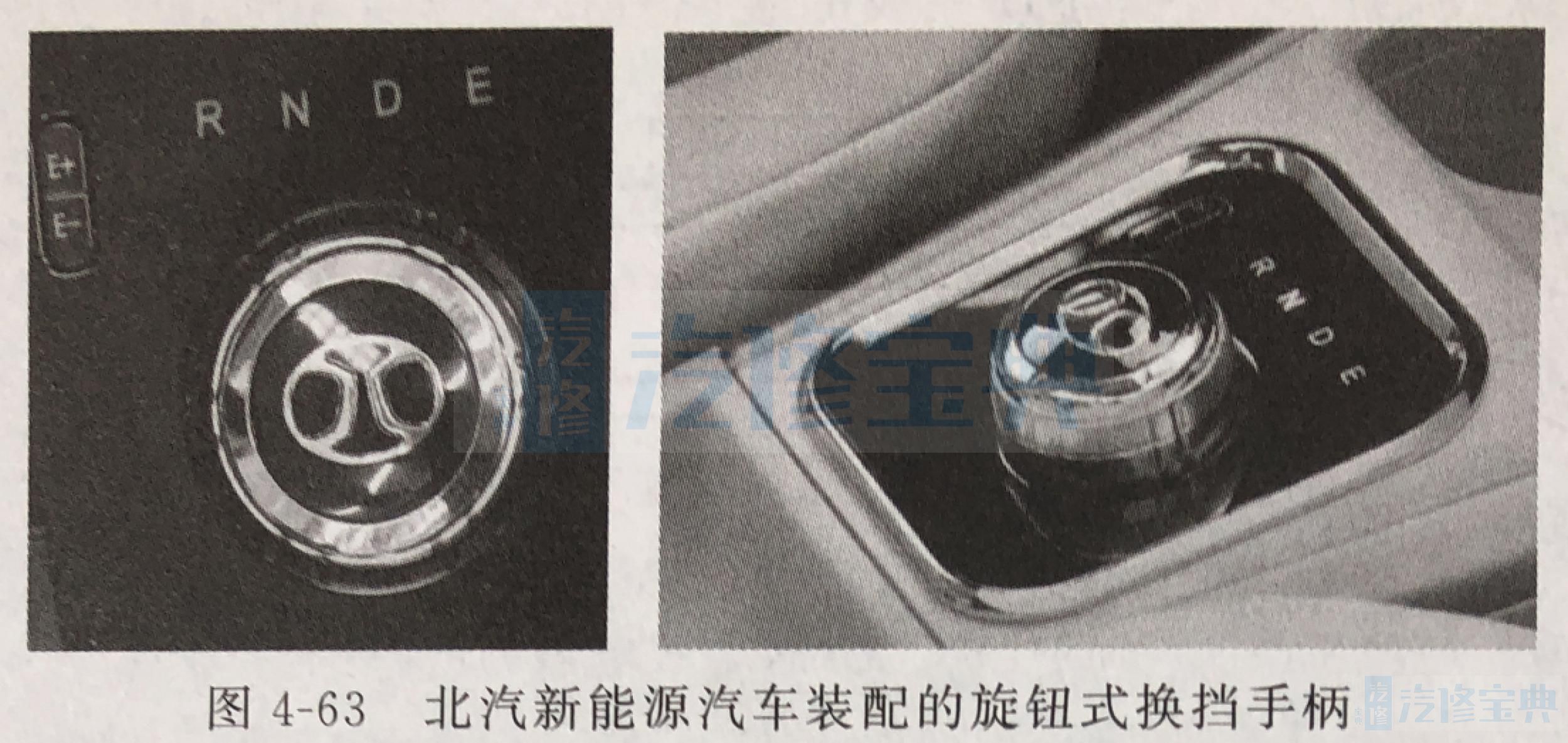
北汽新能源汽车的制动系统基本是在传统汽车的基础上进行改造升级的,行车制动系统和驻车制动系统与传统能源车辆基本没有本质上的区别。 电动机制动馈能控制策略及方法是各新能源主机厂整车控制系统的核心内容之如图4-63所示是北汽新能源车装配的旋钮式换挡手柄,其中E挡就是电动机制动馈能的选择位置,能根据用户不同需求改善能量回收强度及制动性能,妥善使用能量回收系统,可增加续航5%~15%。车辆前进挡分2种,一种是D挡,另一种是E挡(经济模式)。E挡行驶过程中,松开加速踏板时,车辆自动回收能量。回收强度可通过换挡旋钮左上方“E+和“E-”进行选择,如图4-64所示,在仪表中会进行相应地显示。
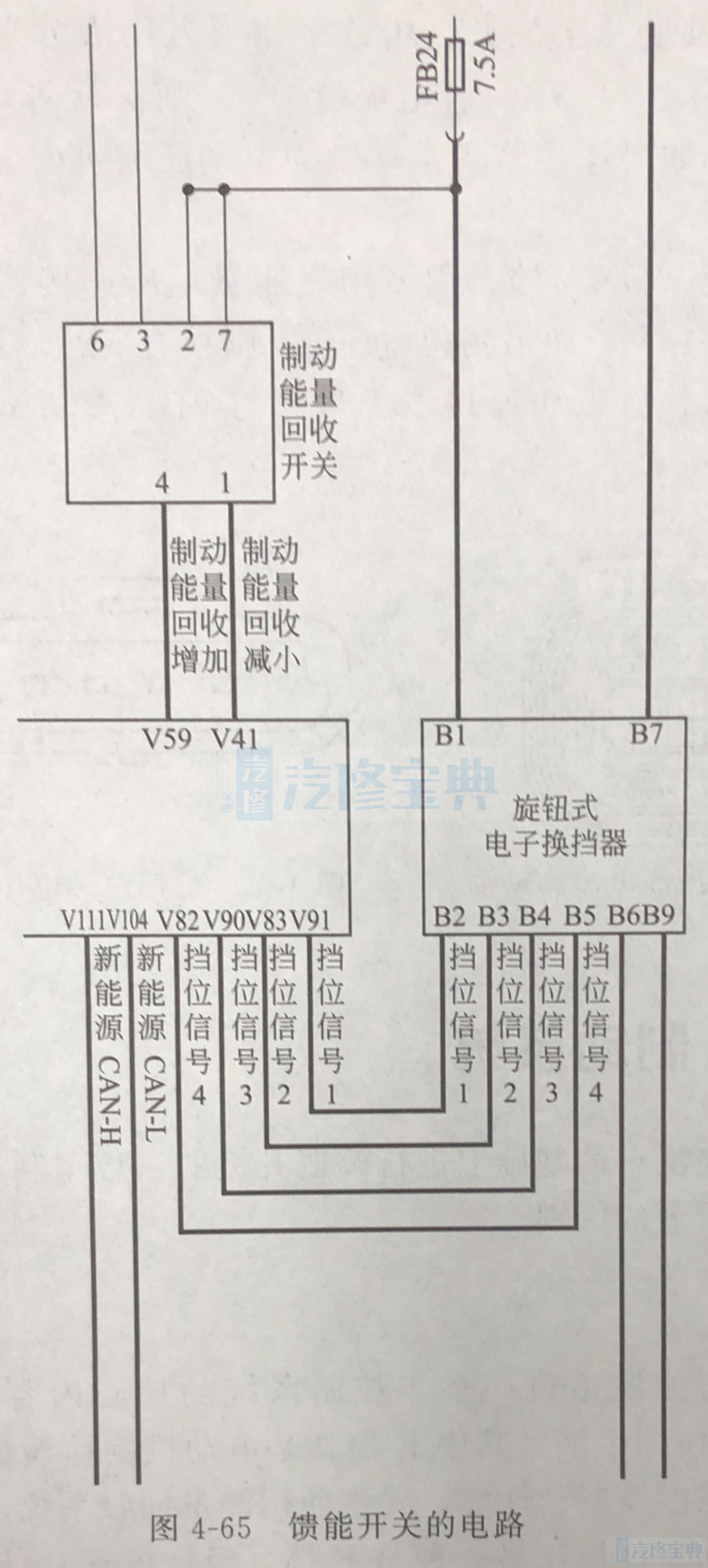
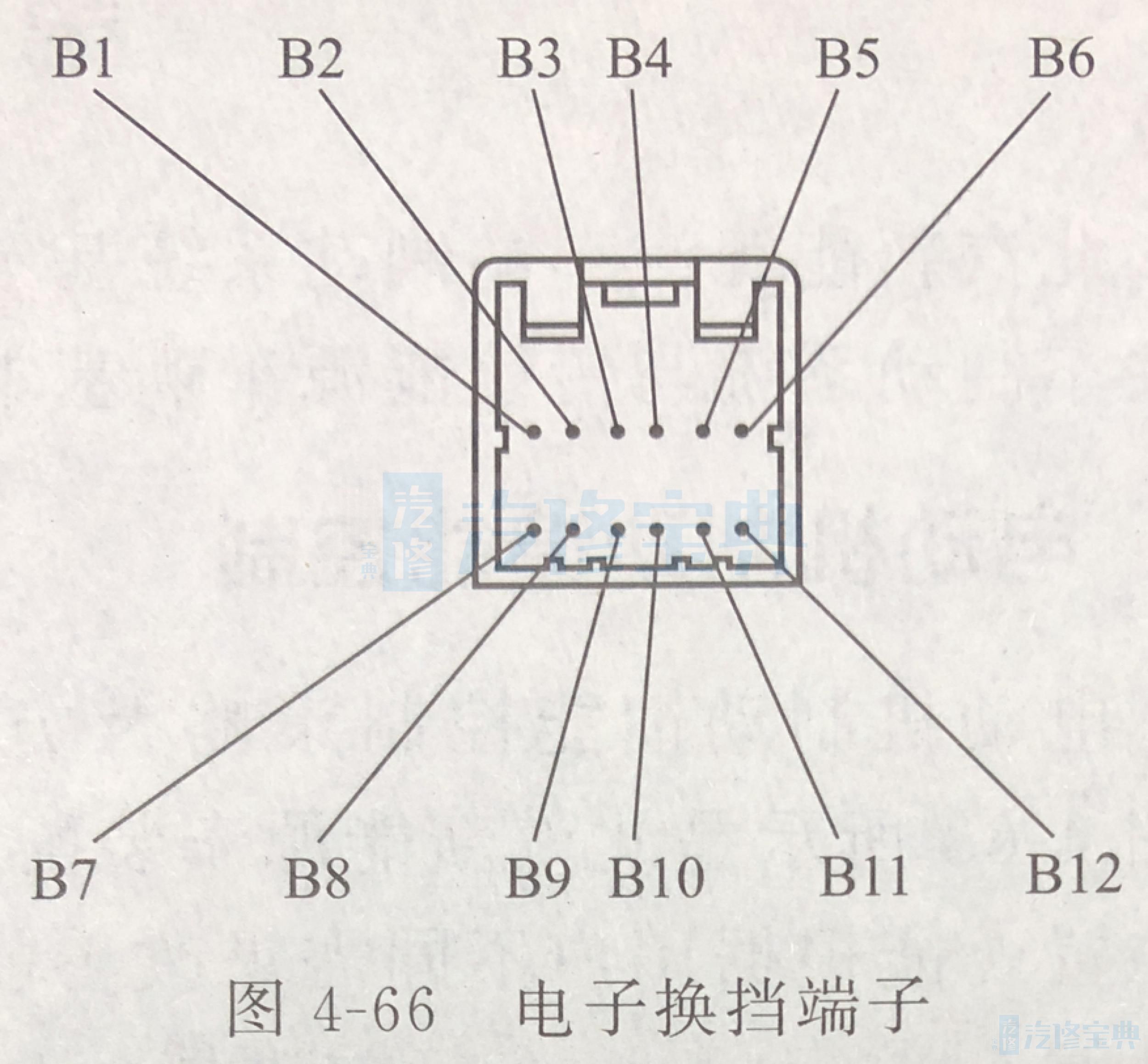
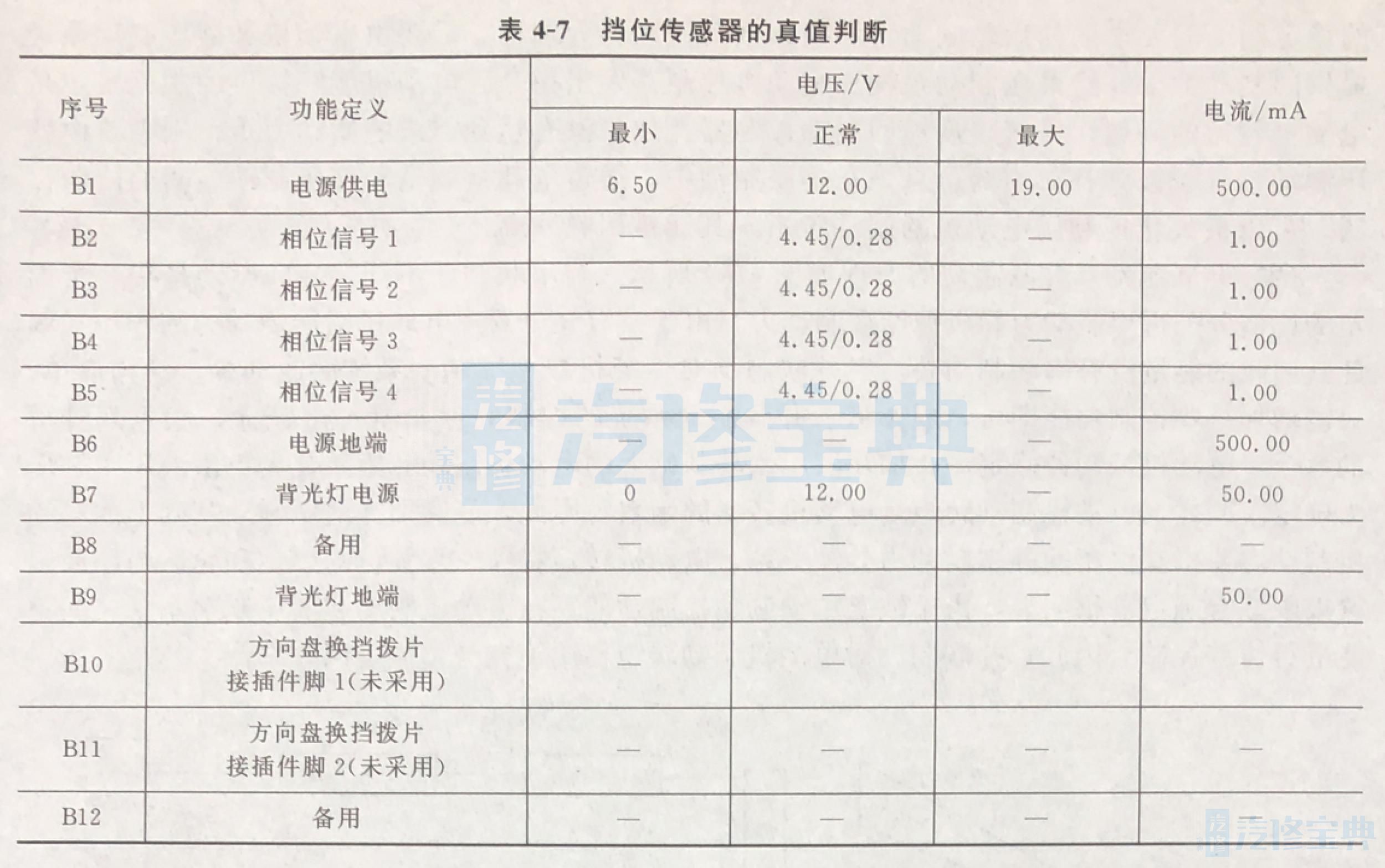
电动机制动馈能控制开关的电路图及端子如图4-65和图4-66所示,挡位传感器的真值判断表如表4-7所示,根据电路图或表中数据,我们可以对开关的信号进行故障分析及判断。
在产生足够制动力矩的同时,通过电动机发电模式在制动的同时能回收的能量越多越好。但是,制动力矩的大小受到诸多因素的制约,因此,为保证可靠的制动效能,电动汽车必须保留传统的机械摩擦制动系统,并与制动馈能组成混合制动结构。这种混合制动系统可以按照2种制动系统工作的方式,分为串联和并联2种类型。
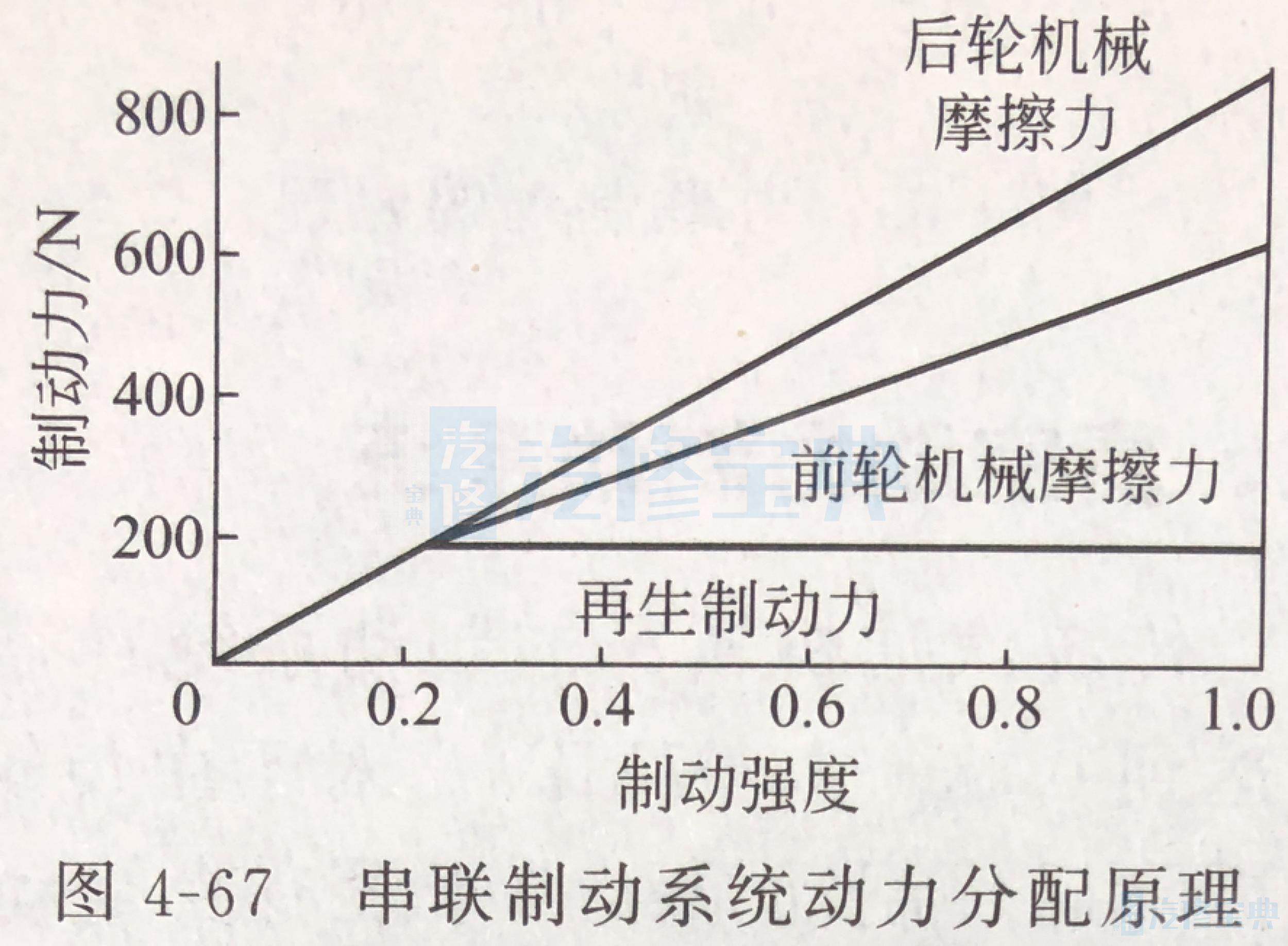
(1)串联制动串联制动系统动力分配原理如图。
4-67所示。串联制动的特点是电动机馈能时的制动力达到其最大值时,机械摩擦制动系统才参与工作,以满足车辆的制动需求。串联制动需要与车辆的ABS集成控制,它能够对单个车轮的液压制动力进行单独调整,并可以保证使用再生制动与路面附着(滑移率)所能允许的最大极限。很显然,由于充分利用了再生制动,因此串联制动将获得最大的能量回收率。但是,串联制动结构复杂、成本高,需要集成的控制系统。
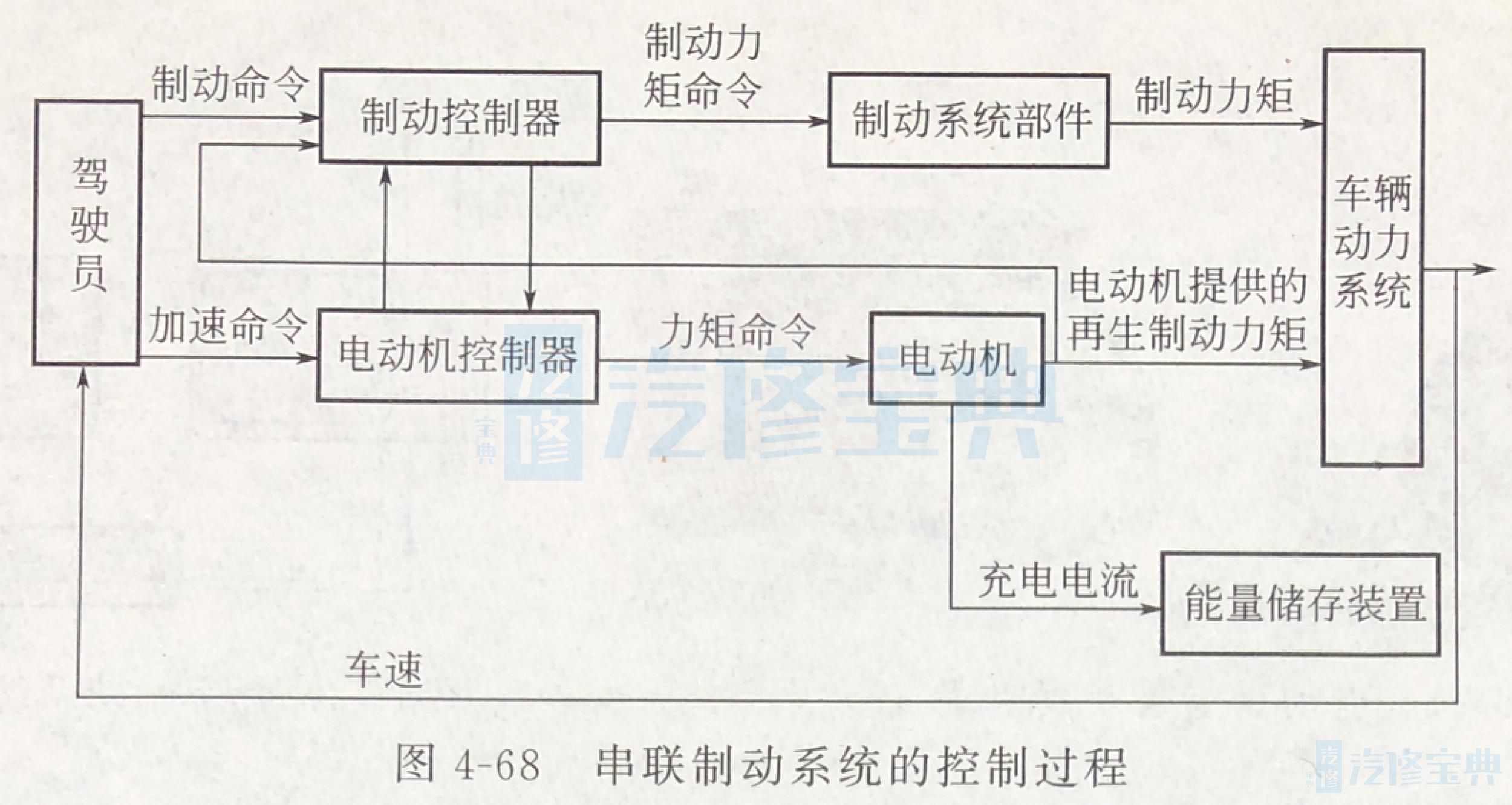
串联制动系统的控制过程如图4-68所示。根据驾驶员的制动命令,考虑到为保持车辆的稳定制动而要求的前后轮制动力平衡,制动控制器分别计算需要由电动机和液压制动系统提供的制动力,并给液压制动系统和电动机控制器发出指令。电动机能够提供的制动转矩是电动机转速的函数,该转矩反馈回制动控制器。如果没有达到需求的制动力矩,则需要由液压制动系统予以弥补。由此可见,在串联制动中,通过电动机制动和液压制动之间的协调控制,可以最大化地利用电动机的制动转矩,其能量回收率高。
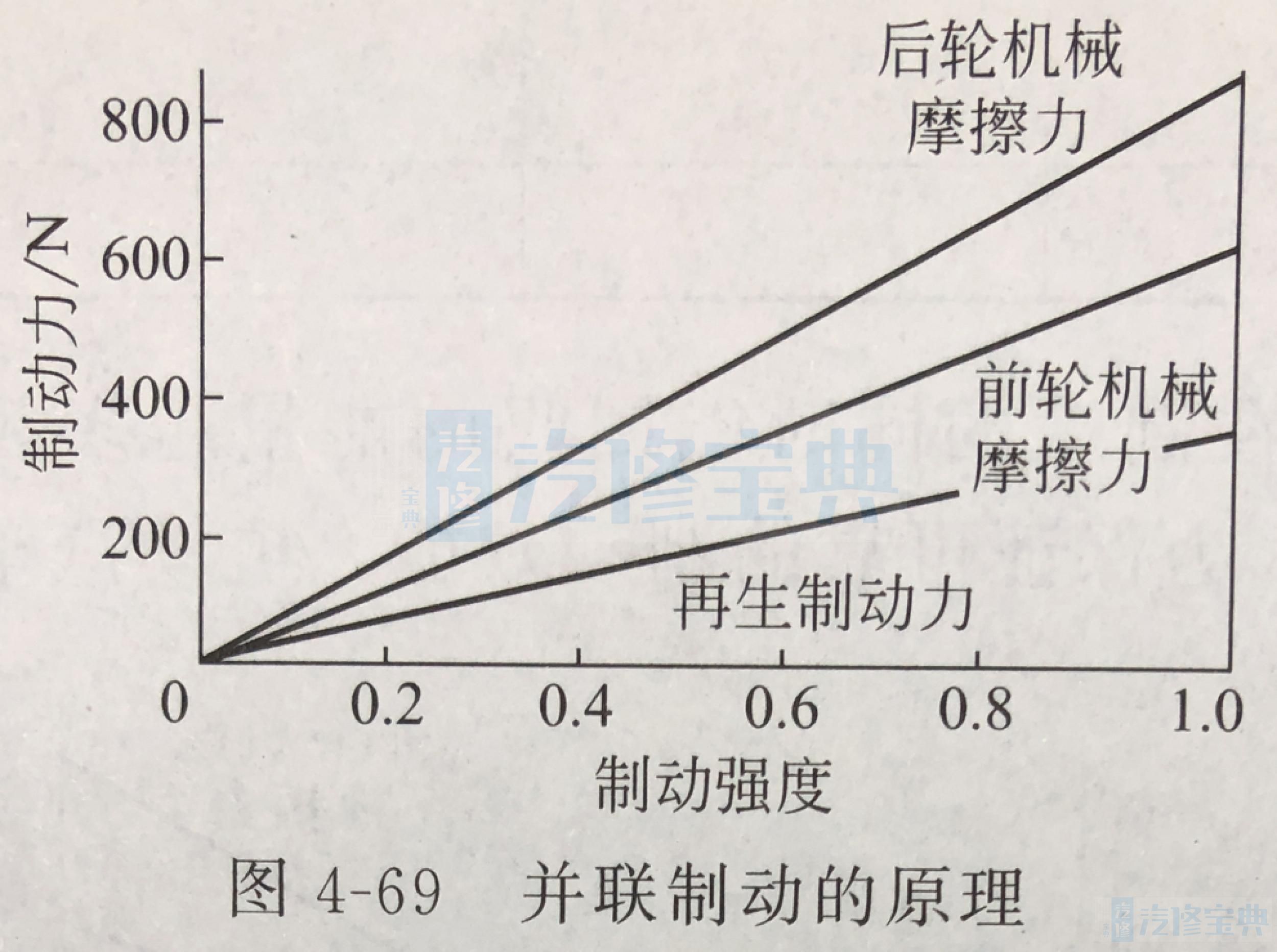
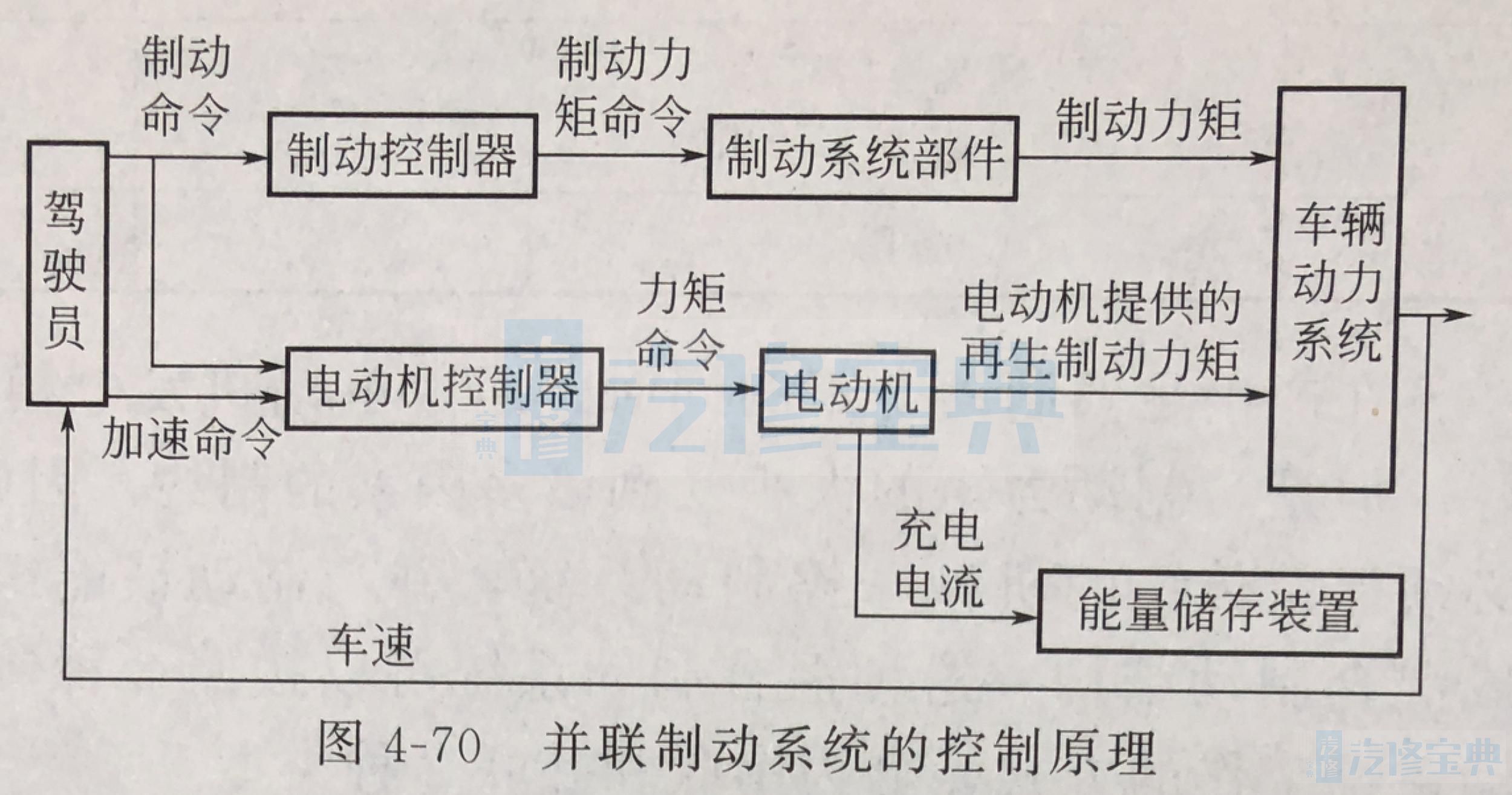
(2)并联制动 并联制动的原理如图4-69所示。与串联制动不同,并联制动是按一个固定的比例分配再生制动力和机械摩擦制动力。由于没有充分发挥电动机馈能制动力的作用,因此其回收的能量没有串联制动高。但并联制动对传统机械摩擦制动系统的改动少,结构简单,只需增加一些控制功能即可,成本低。并联制动系统的控制原理如图4-70所示。根据驾驶员的命令,电动机控制器确定需要加在液压制动基础上的电动机制动转矩,其大小由液压主缸压力确定。同样,电动机制动转矩是电动机转速的函数。因此,能够加在液压制动基础上的电动机制动力要根基汽车的静态制动力分配关系、电动机转矩特性、驾驶员的感觉和轮胎与路面附着极限综合确定。很明显,由于缺乏主动制动控制功能,在电动机制动和液压制动系统之间不能进行协调控制。因此,并联制动对电动机制动转矩使用不充分,能量回收率低。