电动汽车热门的主驱电动机—开关磁阻电动机( switched relutmce motor,SRM)及其控制调速系统具有免维护、控制简捷便利、启/制动性能好、较佳的动态运行性能和稳态精度、运行效率高、可靠性优异、环境适应性强、成本低等特点,正快速普及至家用电器、工矿机械、自动化设备、电子工程、航空、航天及电动车辆等国民经济中的各个领域。 结构开关磁阻电动机硅钢片叠压带绕组的定子磁极和“齿槽”形的转子磁极有不同的极对数。定子极数与转子齿槽数不能相等,又必须相近。只有两者相近,才能加大定子相绕组电感随转角变化的平均变化率,这是提高电动机输出的重要条件。定子绕组可配置为三相、四相、五相等多种类型,定子绕组的组数与其类型相对应。相数较大,其转矩脉动则较小。图3-15为拆解的开关磁阻电动机的定转子。
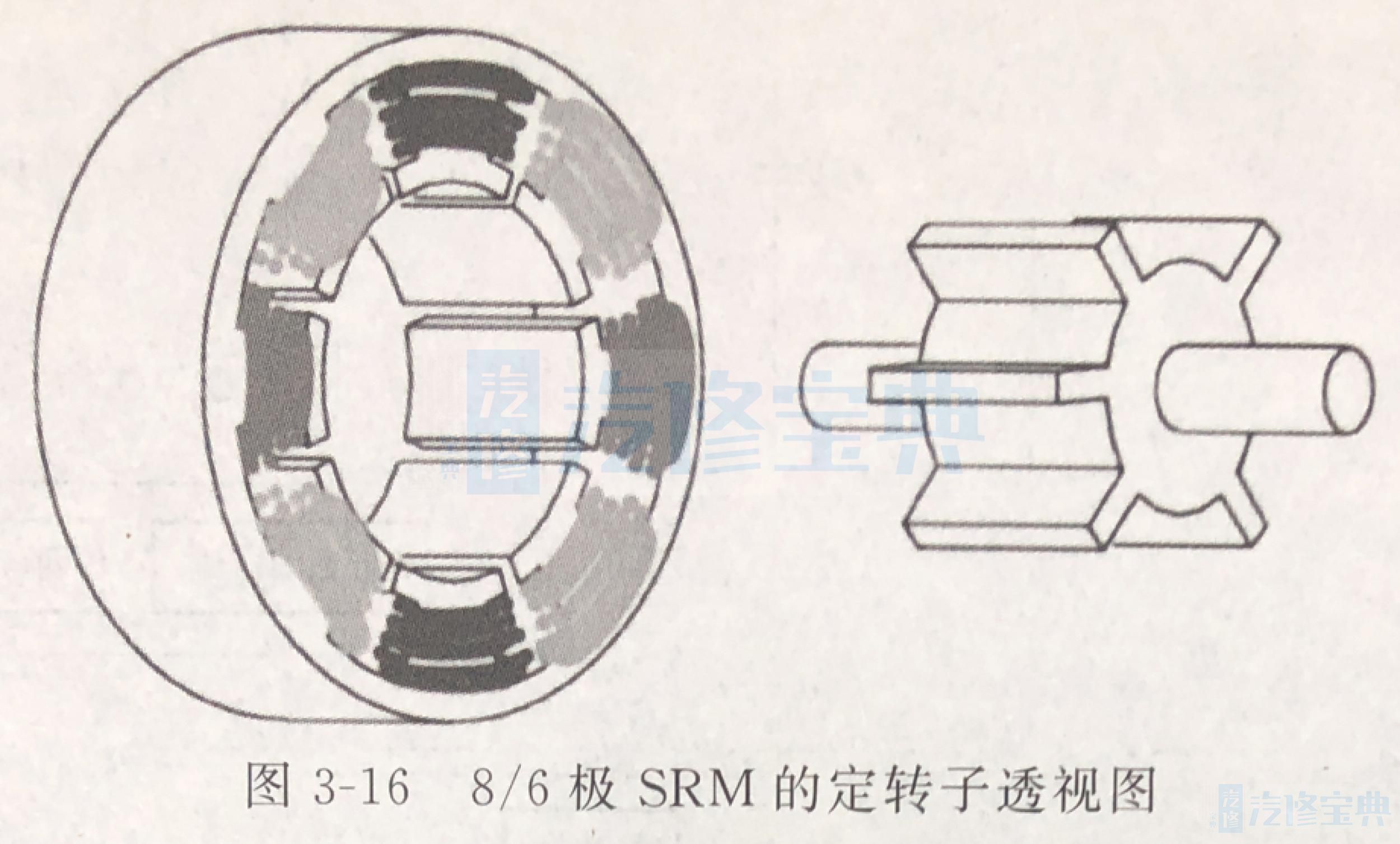
图3-16为8/6极SRM的定转子透视图,用4种色彩表示绕组,绕组连接成四相。当前,开关磁阻电动机的定子磁极数和转子齿极数的差值必须有规律,以四相(8/6)结构和三相(12/8)结构应用较多。
2.原理。
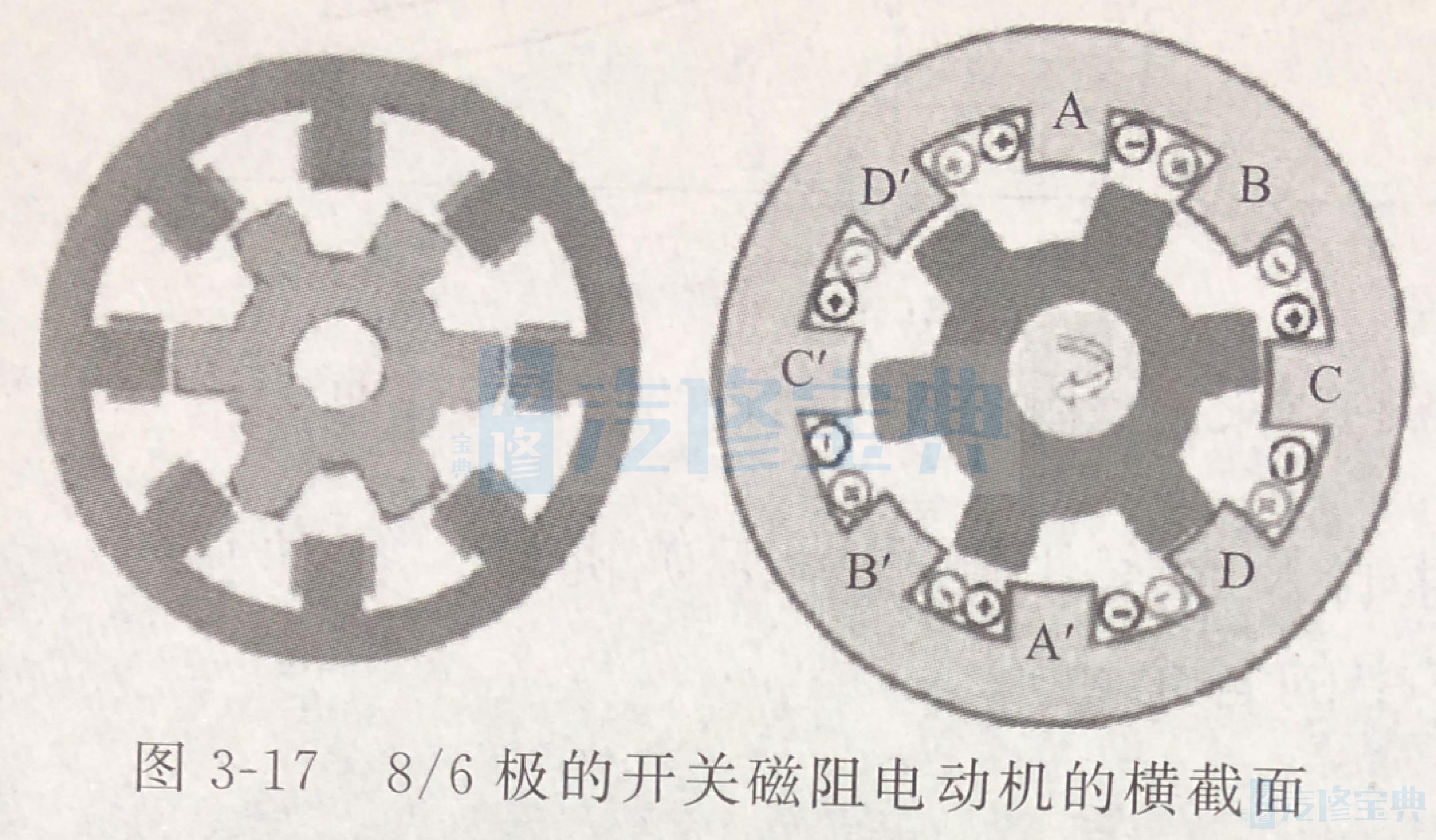
开关磁阻电动机不同于由电磁感应作用产生转矩的传统交直流电动机,它由磁路中定转子间气隙磁阻变化的原理产生转矩磁阻转矩。开关磁阻电动机是因励磁绕组通断状态的变换皆受开关控制而得名。如图3-17所示为定转子8/6极的开关磁阻电动机的横截面,其中定子直径方向上一对磁极绕组形成一相电路。
开关磁阻电动机运行原理:磁通总是要沿着磁阻最小的路径闭合,转子磁极与定子磁极主轴线相重合时,即是磁阻最小位置,于是就促使转子向最小磁阻的位置转移,励磁绕组依次通电,产生旋转转矩,从而形成旋转的磁场。如图3-18所示的转矩作用,类同于励磁的电磁铁吸引铁磁物质而产生拉动转子转动的现象。
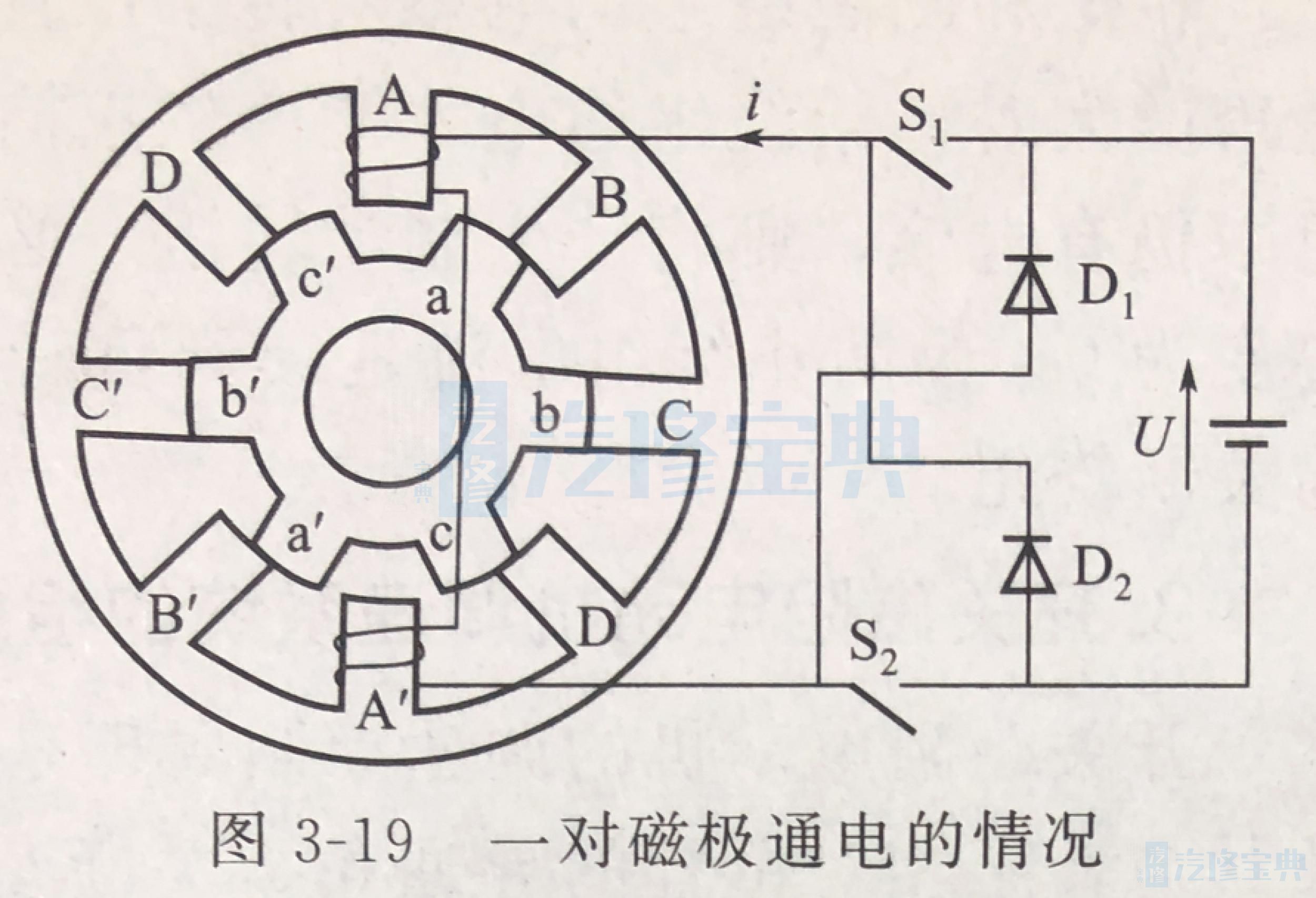
图3-19中仅标出A相励磁绕组及其供电电路磁阻最小原理”揭示,磁通会沿着磁阻最小途径闭合,转子的凸极中心轴线与励磁定子凸极磁场轴线相重合时,磁路有最小磁阻。亦即通电的一组励极对产生的磁通会追逐到最近的磁导体闭合磁通,由于磁通总是沿磁阻最小的路径闭合而产生力矩,将转子由0°旋转到10°,实现最小磁阻。当A-A’极励磁时,转子a-a’向定子A-A’轴线重合的位置转动,这时A相励磁绕组的电感量L最大。
若以图3-19定转子的相对位置作为起始态,依次给D→A→B→C相绕组通电,转子即会逆着励磁顺序以逆时针方向连续转动;相反,若依次给B→A→D→C相通电,则电动机即会沿顺时针方向转动。故依次对A-A’、B-B′、C-C’、D-D’按顺序变换绕组正负极通电,即可控制形成一个固定转向的旋转磁场。完整的相位变换,使采用简单的开关变换电路便可实现转向的变换。其顺序是,A-A’相绕组通电→a-a’与A-A’重合;B-B’相绕组通电→b-b′与B-B’重合;C-C’相绕组通电→c-c’与C-C’重合;D-D’相绕组通电→a-a’与D-D’重合;电动机转子便会逆励磁顺序方向连续旋转。
当向A~D各相绕组依次通电流时,电动机转子会逐步沿着逆励磁顺序方向连续旋转。
若改变各相绕组通电的顺序,电动机将改变旋转方向。但是,绕组相电流通电的方向,并不会影响转子旋转的方向。亦即开关磁阻电动机的转向与相绕组电流方向无直接关联,而仅取决于各相绕组通电的顺序。
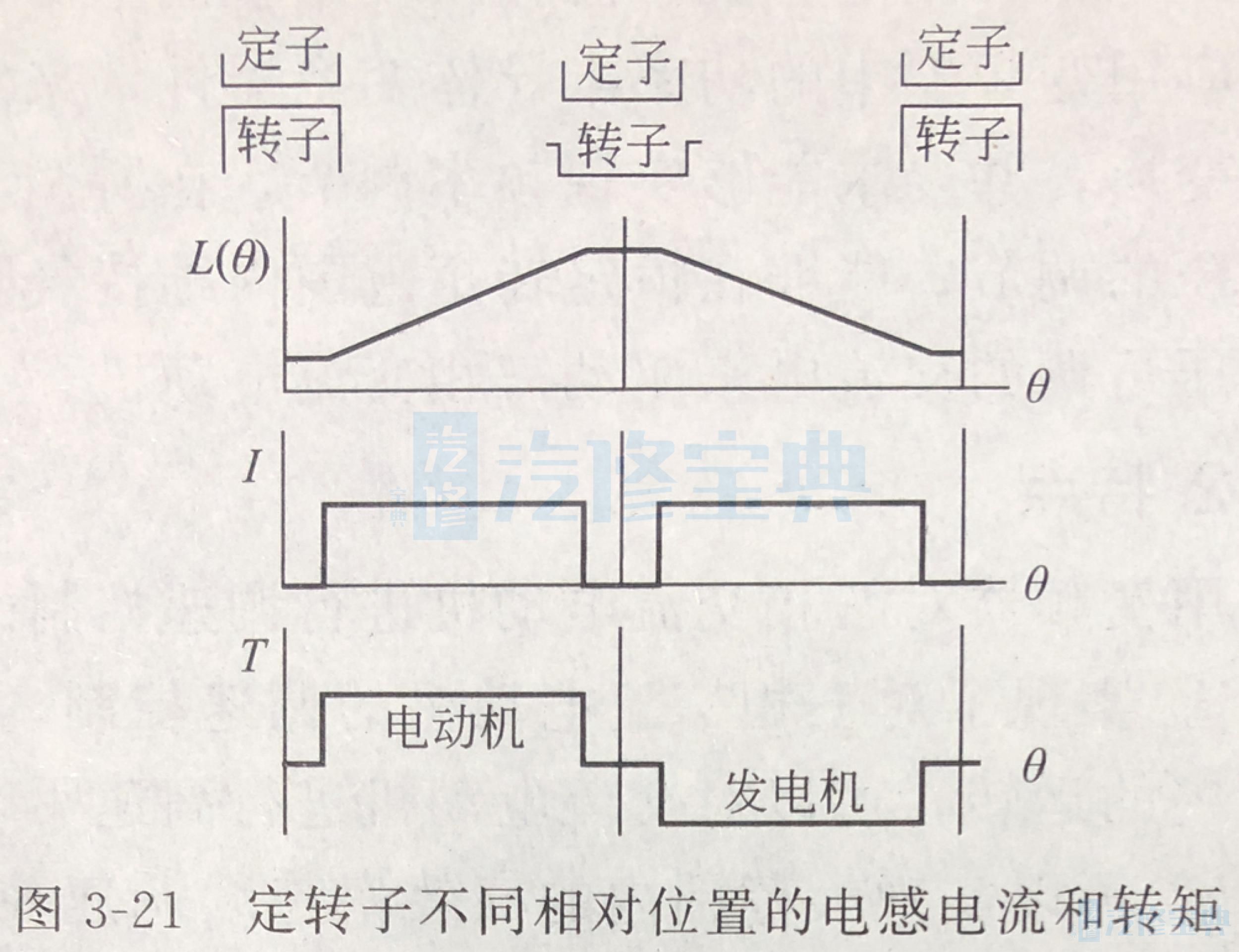
转矩和励磁绕组的电感对转子位置角θ的变化率呈正比关系。只有当绕组电感随转子位置角增大时,给绕组通电才能产生正向电动转矩;而当电感随转子位置角变化下降时,若绕组中仍有电流,则将产生制动转矩。必须注意:相绕组关断后,因电感的延迟作用电流不能突变为0,为防止绕组电流延续到负转矩区(制动转矩),必须在绕组电感开始下降前,提前关断绕组。
3.开关磁阻电动机调速系统的组成。
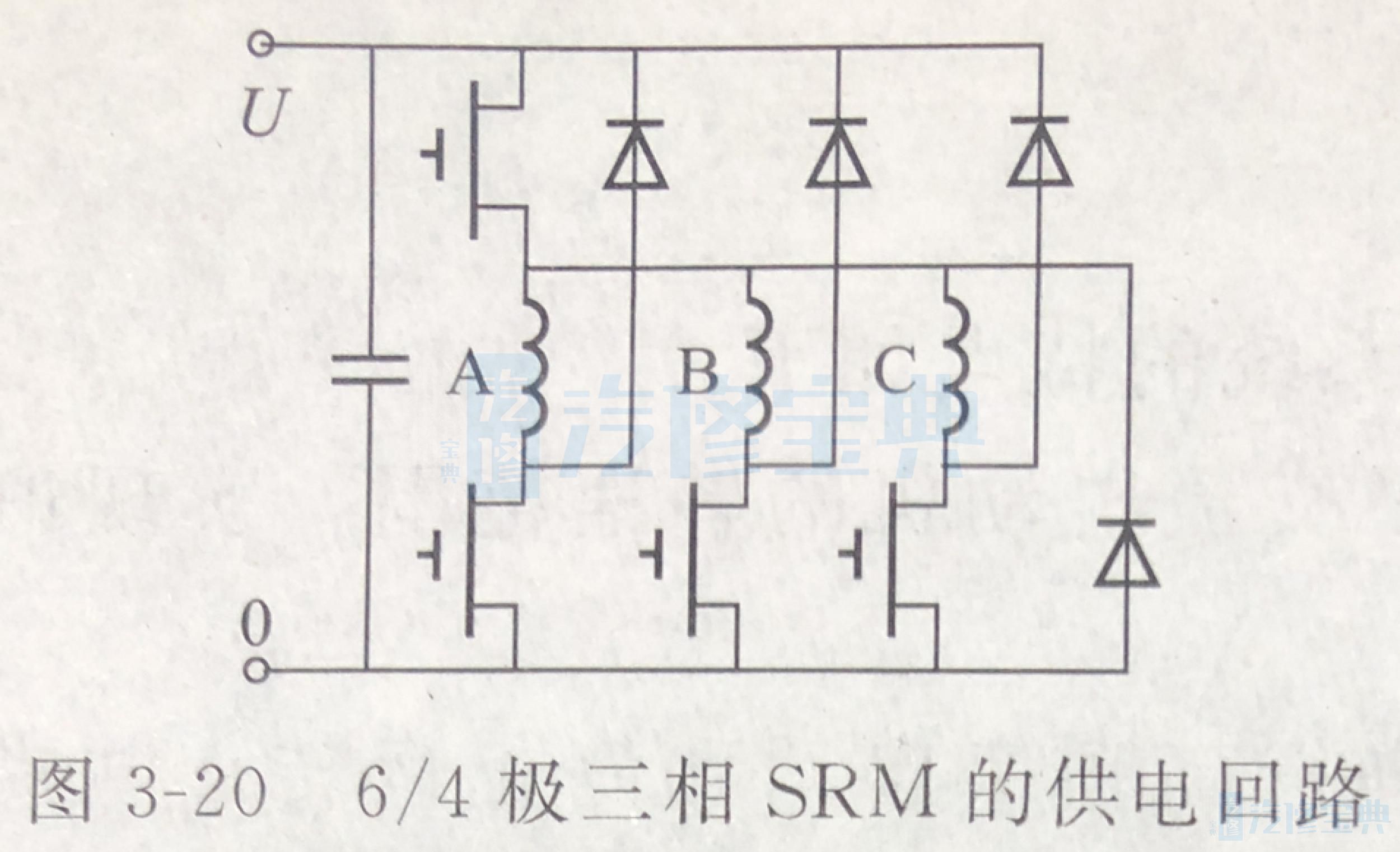
开关磁阻电动机的调速控制原理是通过控制加至SRM绕组端的电流脉冲的幅度、宽度及其与转子相对位置的导通角、关断角来实现的,从而控制开关磁阻电动机转矩大小与方向,成为一种新型的无级调速驱动系统,广为应用。
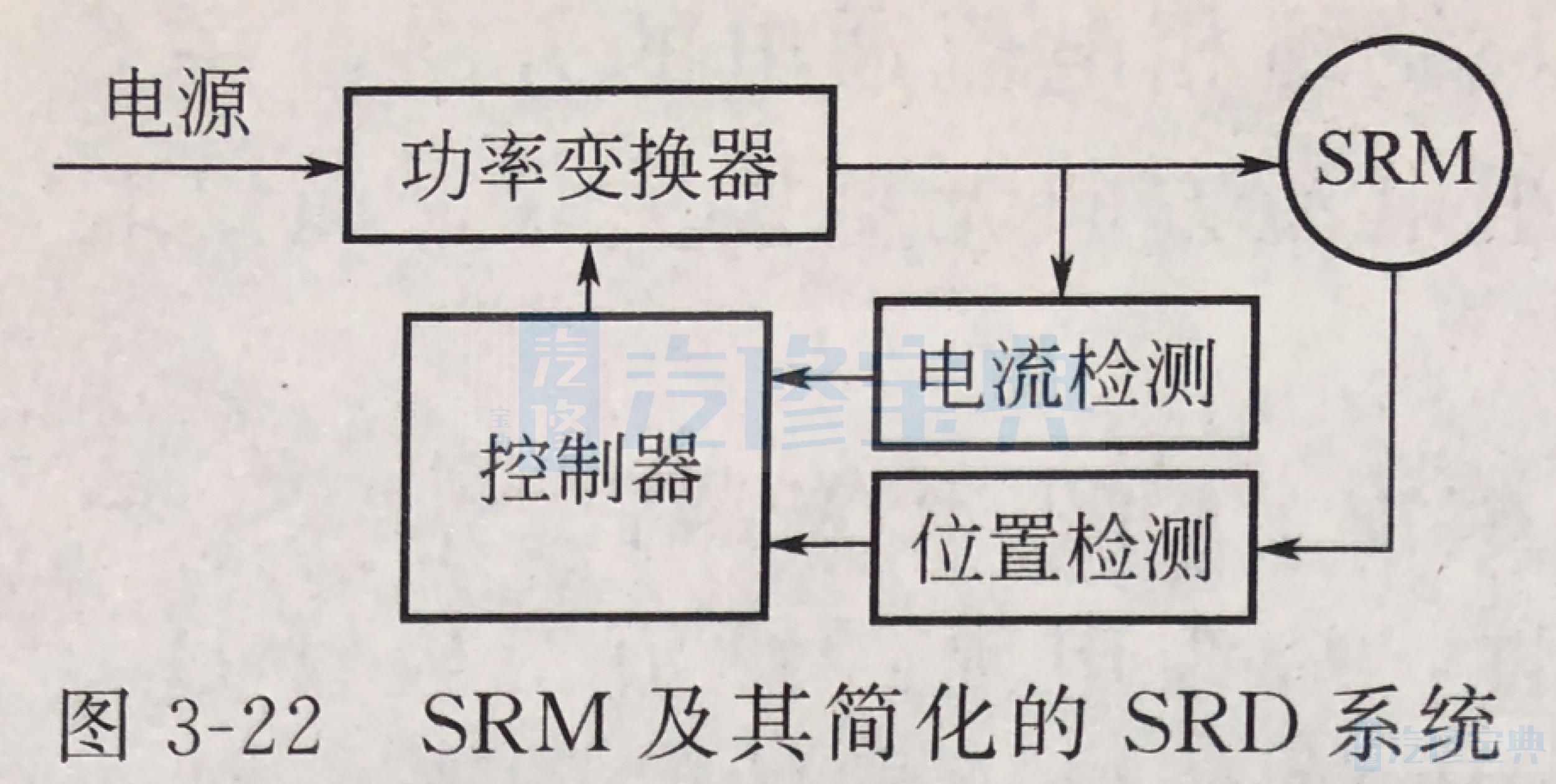
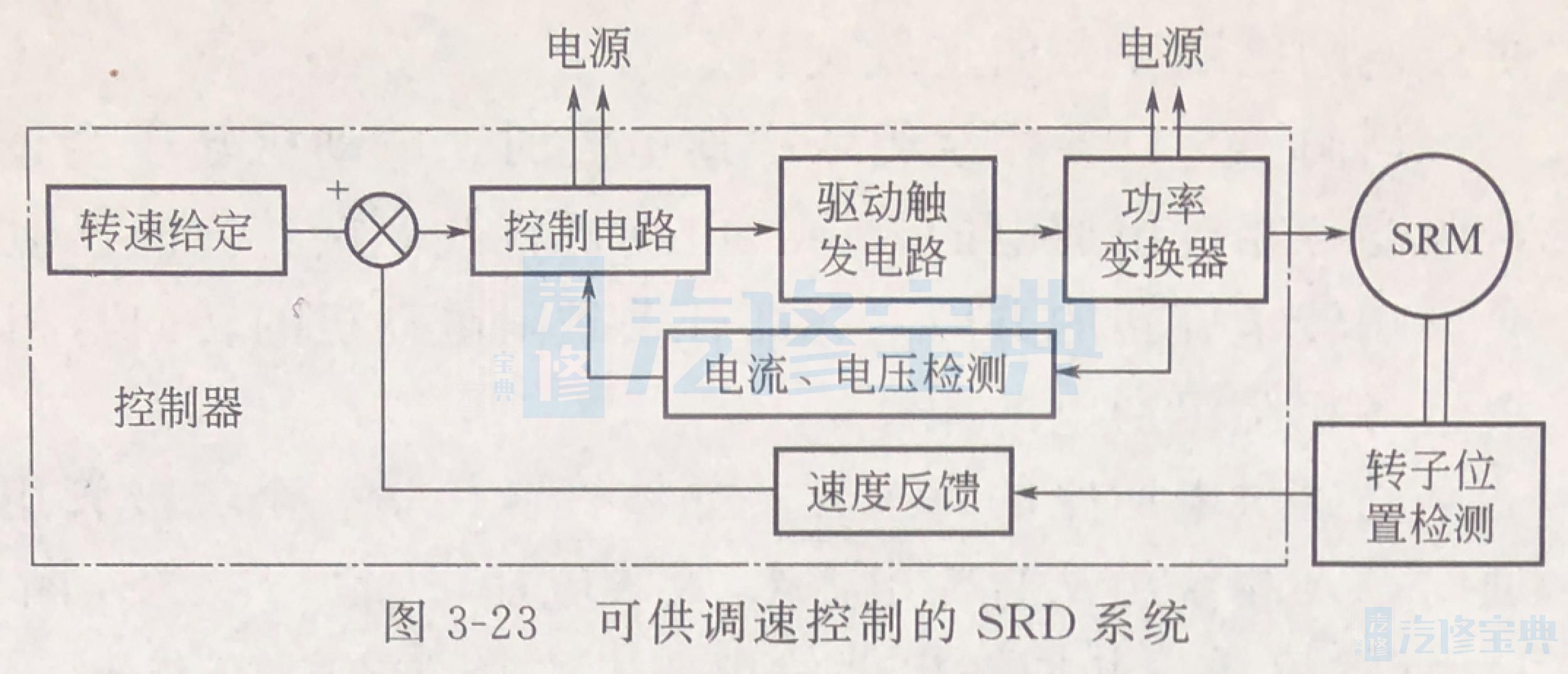
正是因为开关磁阻电动机是一类机电一体化的产品,实际现场使用,电动机无法直接连接一个简单的交流或直流电源来驱动负载工作,必须和驱动控制部分不可分割地联系在起,形成一个系统。开关磁阻电动机调速系统(SRD),由开关磁阻电动机、功率变换器控制器和位置检测器等几部分组成,也有把功率变换器和控制电路合称为控制器的,而转子位置检测器一般总是装置在电动机的非输出轴一侧。如图3-22所示为SRM及其简化的SRD系统。如图3-23所示为可供调速控制的SRD系统。