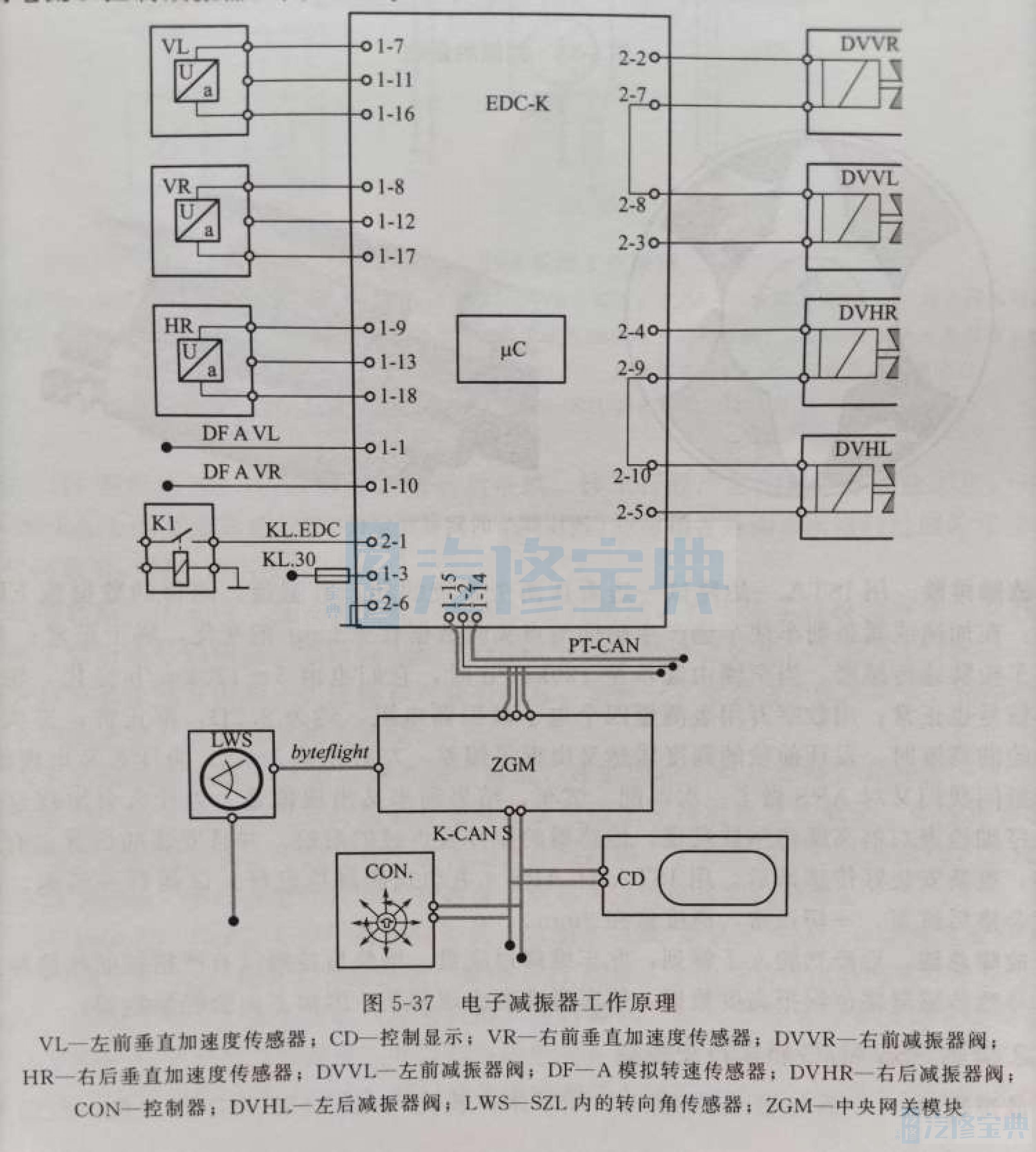
故障现象: 辆2004年款进口宝马E66 745Li轿车,行驶里108258km,驾驶员反映行驶时车辆跑偏,做过四轮定位以后,有所改变,但还是有向右跑偏的现象,维修过多次都没有解决。 故障诊断: 接车后,看过汽车底盘,没有发现有被撞过痕迹,检查四轮轴承、转向摇臂、转向横拉杆、平衡吊杆、转向控制臂头球、带橡胶支座压杆、轮胎气压均正常,只是发现前轮左右轴高度有9mm的高度差。 首先用IsTA(宝马专用诊断仪)把前后轮统一调整到标准高度,确认在标准范围内接着用KDs(四轮定位仪)检查四轮定位数据,调整前报告左右后轮外倾角、右后轮前束两前轮前東、右前轮倾角,有不同程度超出了标准范围。按照调整后轮倾角→调整后轮前束→前轮倾角→调整前轮前束的步骤进行调整。经过KDS调整后,其数据都在标准范围内然后路试,有些好转,但还是轻微向右跑偏,怀疑是轮胎有轻微磨损导致。于是左右调换轮胎再试,结果还是一样,这说明真正的问题还没有找到。 以上引起跑偏最常见的基本问题已排除,接下来必须对该车底盘系统进行深入的学习理解,经查资料,宝马(E66)带有EDCK(电子减振器)和ARS(主动式侧翻稳定杆)两大控制系统。EDCK的任务是补偿行驶期间作用在车辆上的动态力,这些力有:垂直力(如因路面不平)引起的、横向力离心力(如侧风)引起的、纵向力加速(如制动)引起的。 这些力大部分由连续调节式减振器消除。EDCK控制单元接收相关传感器信号,然后调节电磁阀电流以控制减振器(图5-37)。
ARS系统的结构原理如下。
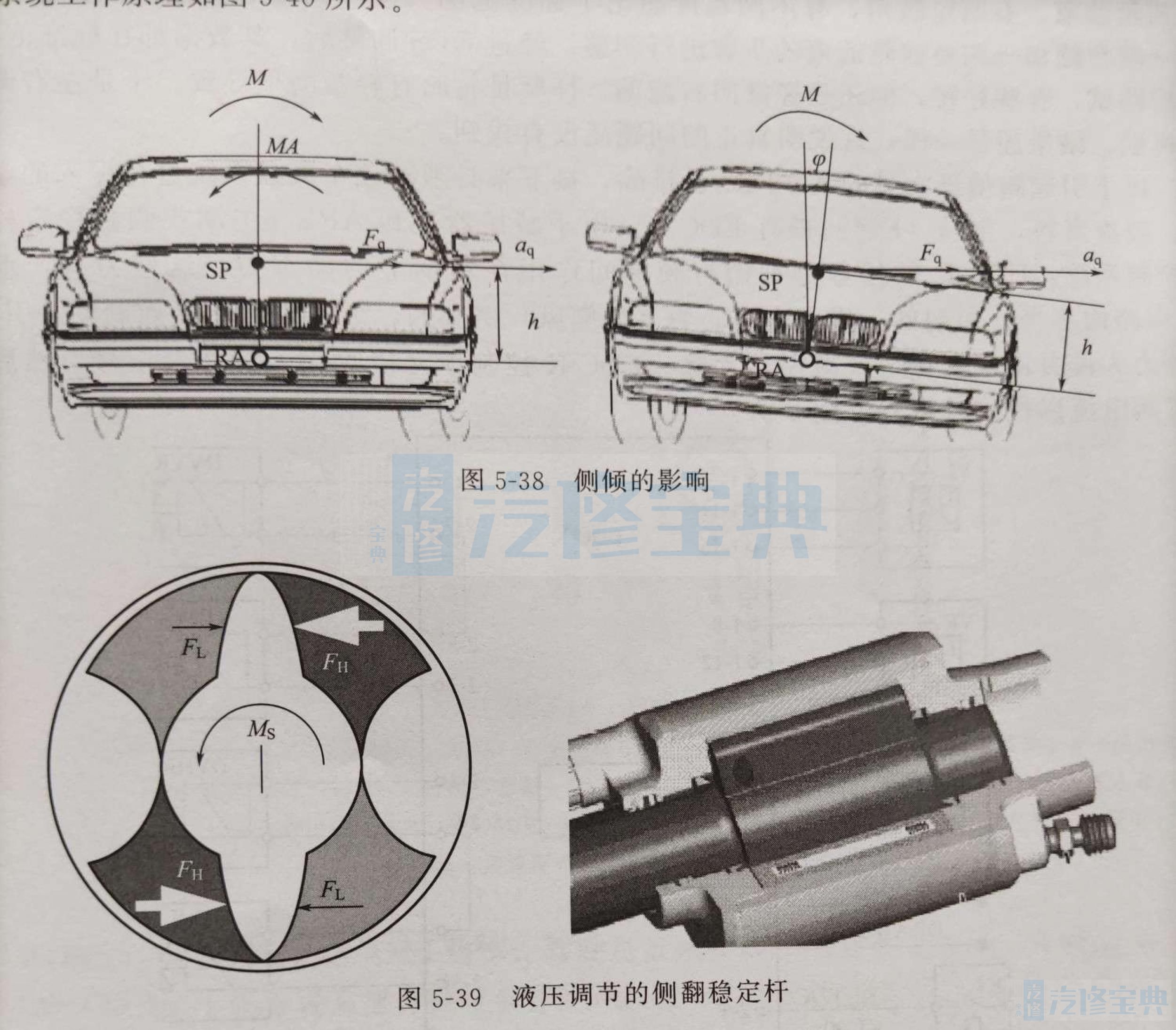
车辆转向时会产生一个横向加速度aq,它作用在车身的重心SP上(图5-38),车身绕侧滚轴线侧倾。若车辆带有动态驾驶装置,横向加速度小于3m/s2时,侧倾力矩M则完全由被动式弹簧抵消。当橫向加速度大于3m/s2时,侧倾力矩M由ARS系统主动调节(侧翻稳定杆)力矩MA进行抵消,以保证车身不会过度倾斜。液压调节的侧翻稳定杆如图5-39所示,ARS系统工作原理如图5-40所示。
故障排除:
用ISTA一边路试一边看这两个系统的动态数据流。测得的数据流EDCK包括:在加速或紧急刹车使车辆产生俯仰与点头时数据在±2.5g内变化,属于正常;左前/右前车轮转速传感器,当车辆由起步至120km/h时,它们也由5~120km/h变化,轮速传感器信号也正常;用数字万用表测量四个电子减振器电阻,约为2.20,都正常;再次测量前后轮的高度时,发现前轮的高度居然又出现了偏差,左右相差9mm。为什么又出现偏差带着疑问我们又对ARS做了一次匹配,试车,结果回来又出现偏差。为什么会出现这种问题?仔细检查右前高度传感器发现,传感器的拉杆有拆过的痕迹,并且安装的位置也有略微偏移,重新安装好传感器后,用1STA对ARS(主动式侧翻稳定杆)试运行并匹配,测量高度合格后试车,一切正常,高度差在3mm故障总结:
后经驾驶人了解到,此车维修过底盘,维修后技师没有严格按照维修标准施工,导致传感器错位误报高度数据,使车身高度出现偏差,因而方向会轻微跑偏。