具有制动功能的定速巡航控制系统也称为动态定速巡航控制系统(DCC)。在车流量较少的道路上,动态定速巡航控制系统(DC)可不受行驶阻力(坡度,下坡行驶和车辆负荷)干扰,通过保持车速恒定不变来减轻驾驶员的负担。但是仍由驾驶员负责控制车辆,驾驶员可随时通过制动或加速来控制DCC功能1.调节功能。
定速巡航控制系统根据驾驶员设置的预期车速和实际车速计算出一个规定加速度及规定减速度。驾驶员可通过多功能方向盘MFL上的翘板开关设置所需车速或所需加速度(1)转弯行驶时的定速巡航控制系统转弯行驶时的定速巡航控制系统又称为“横向加速度调节功能”,用于在定速巡航控制系统接通情况下防止车辆转弯行驶时橫向加速度超过舒适限值。系统根据车速和横摆率计算出横向加速度,并将该数值与随车速变化的限值进行比较,从而实现下列看似矛盾的目标:在驾驶员希望以较高横向加速度行驶的情况下,避免进行限制过强的干扰性干预。在高速行驶时进行有效干预,从而显著降低动力性。大多数驾驶员都会因横向加速度过高感觉不舒服,因此会采用较低限值。转弯速度调节功能的输出参数也是纵向加速度的规定值。
部分规定值的优先级排序,系统按照上述调节功能的纵向加速度规定值,根据具体情况选择具有最高优先级的规定值。在此通过信号过滤避免切换规定值时出现突然跳跃。
(2)干扰力评估为了通过执行机构实现经过优先级排序的纵向加速度,必须计算出加速度和制动力。例如:为了达到相同的纵向加速度,上坡行驶时比在平坦路面上行驶时需要更大的驱动力。如果需要在上坡行驶时减速,则所需制动力低于平坦路面。为了准确计算出所需作用力,不仅需要道路坡度的精确数值,而且需要车辆重量、滚动阻力、空气阻力和其他加速作用力的相关数据。
由于没有针对所有这些干扰力的传感器系统,通过比较实际车辆移动参数和根据有效驱动力及制动力计算出的预期车辆移动参数这两项参数计算出一个评估值,在进一步的纵向加速度规定值处理过程中添加或扣除由此得到的干扰力数值。
2.控制执行机构。
为了实现调节功能计算出的纵向加速度并补偿出现的干扰力,必须产生相应的驱动力和/或制动力,为了使车辆加速,通常会向传动系统提供一个规定值。在下坡坡度较大的特殊情况下,可能还需要通过控制制动器来使加速度限制在特定数值。
需要车辆减速时,系统首先确定传动系统可达到的减速效果以及发动机和变速箱的制动作用。将该数值发送至数字式发动机电子系统DME或数字式柴油机电子系统DDE以及变速箱电子控制系统EGS。如果仅靠传动系统自身无法实现该数值,则将所需附加数值发送至动态稳定控制系统DSC。如果通过明显操作制动器来达到预期车辆减速度,也会接通车辆的制动信号灯。
3.控制开关操作。
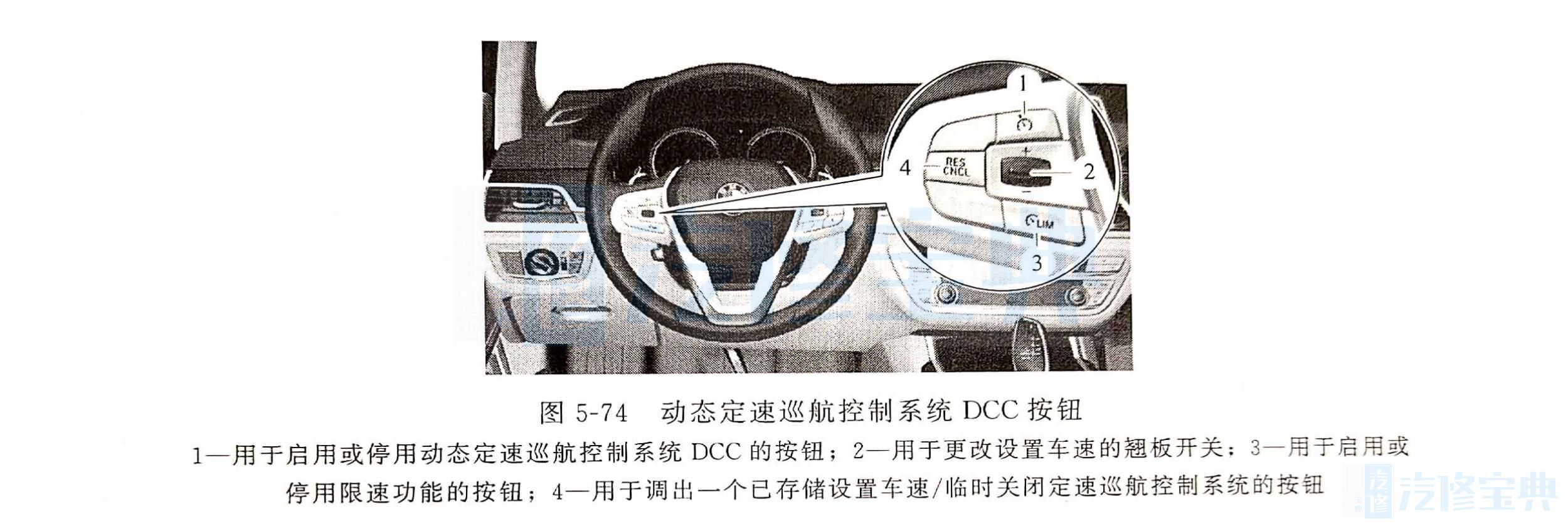
如图5-74所示,驾驶员可对设置车速进行微调和粗调,系统通过控制传动系统和制动器调节车速。通过多功能方向盘MFL上的左侧开关组件进行操作,每次轻按翘板开关可车速提高或降低1km/h,每次将翘板开关压过压力点都会使车速提高或降低10km/h,超过约30km/h后,DCC就会恒定保持所选车速。
像以前一样,在组合仪表内通过一个围绕车速表移动的标记显示预期车速。需要时会对组合仪表内的显示提供文字补充说明。如果车辆自身减速度不足以保持预设车速,就会相应控制制动器。设置车速的调节范围最高限制在210km/h启用 ECOPRO或运动模式时也会将定速巡航控制系统调节为节省燃油或运动的驾驶方式。采用 ECOPRO驾驶模式时,在某些情况下可能会由于节省燃油的驾驶方式导致超过或低于设置的预期车速,例如下坡或上坡行驶时。
自动中断巡航系统的情况有:
①进行制动;
②离开选挡杆位置D;
③启用动态牵引力控制系统DTC或停用动态稳定控制系统DSC;
④动态稳定控制系统DSC进行调节。