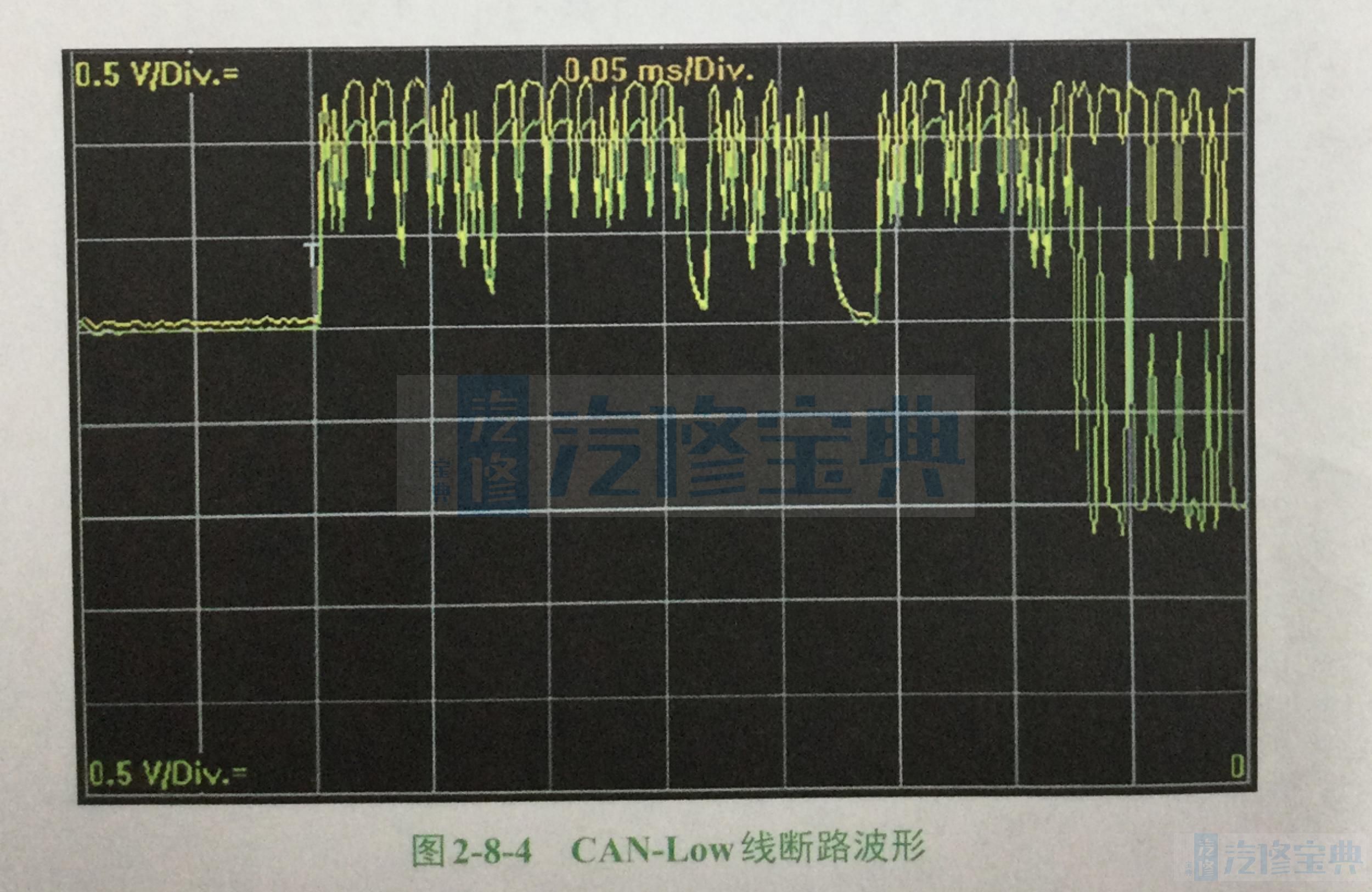
(1)CAN-LOW线断路故障: CAN-Low线断路波形如图2-8-4所示。
CAN-Low线断路故障原理图如图2-8-5所示。
故障查询方法。
a.拔下相应控制单元的插头,检查触点是否弯曲。
b.再次插上插头,查询故障存储器。如果还是显示有故障,那么再次拔下通信有故障的控制单元插头。
c.查看一下电路图,将与有故障的控制单元直接相连的控制单元插头拔下。
d.对于CAN-Low线来说,检查插头内针脚之间的连接是否断路。
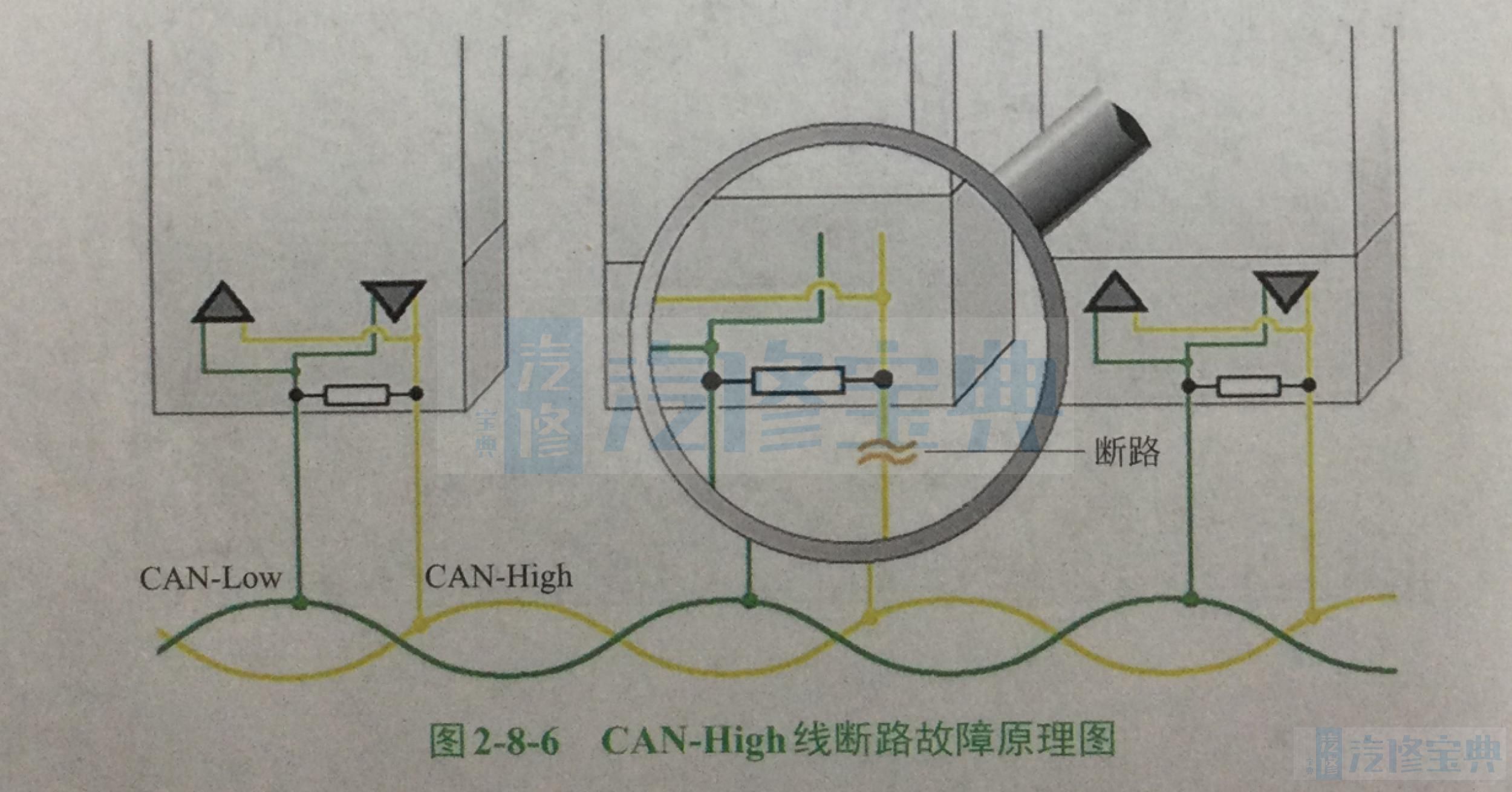
(2)CAN-High线断路故障:
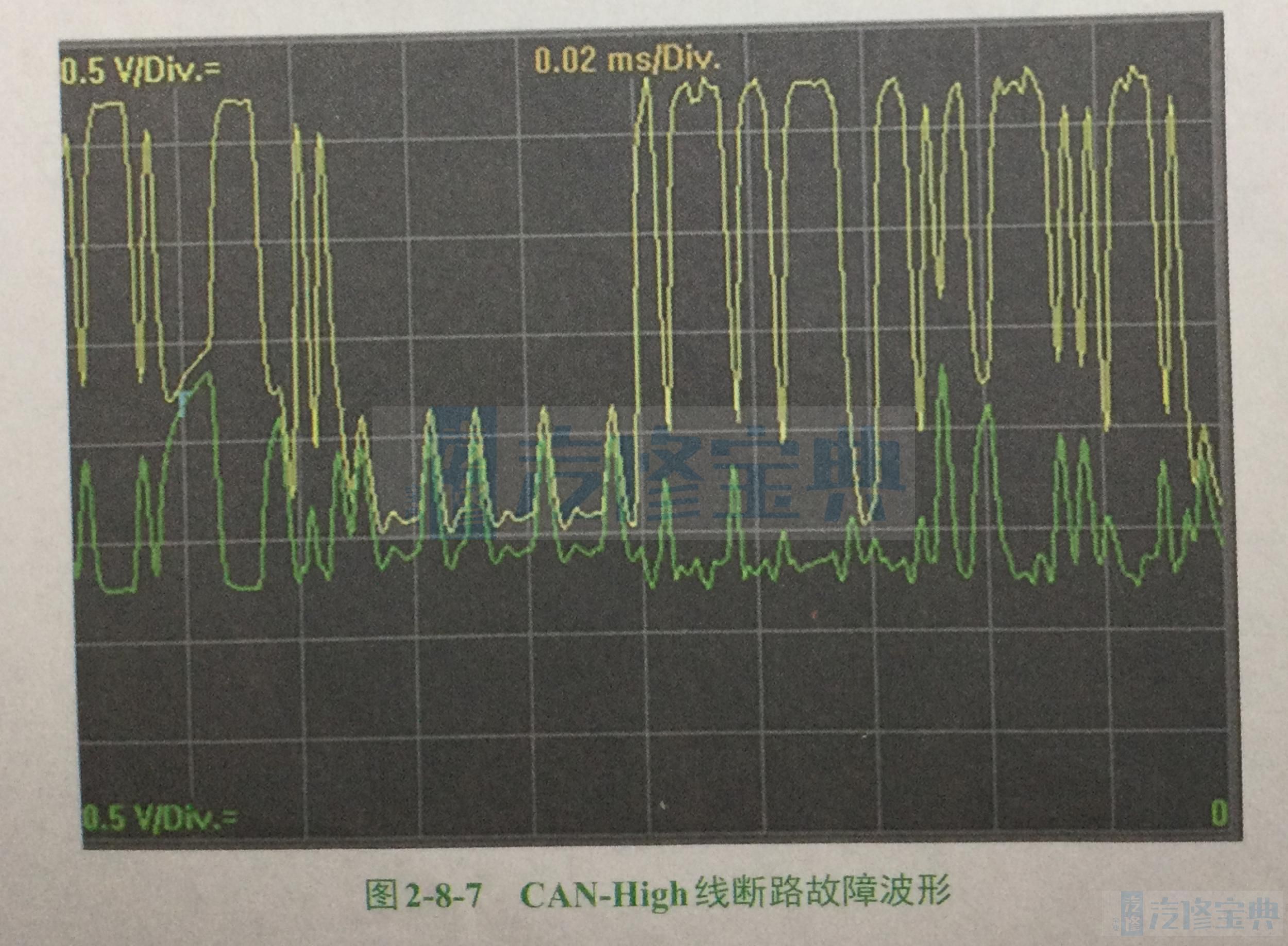
CAN-High线波形变化范围很大且杂乱无章(可能有其他控制单元的信号窜入)。发生CAN-High线断路故障时,驱动CAN总线无法正常工作(图2-8-6)。
由于电流无法再流向中央终端电阻通过CAN-Low线,两条导线电压均接近1V。
如果还有其他控制单元在工作,那么图中显示出的电平就会与 CAN-High线上的正常电压一同变化(图2-8-7)。
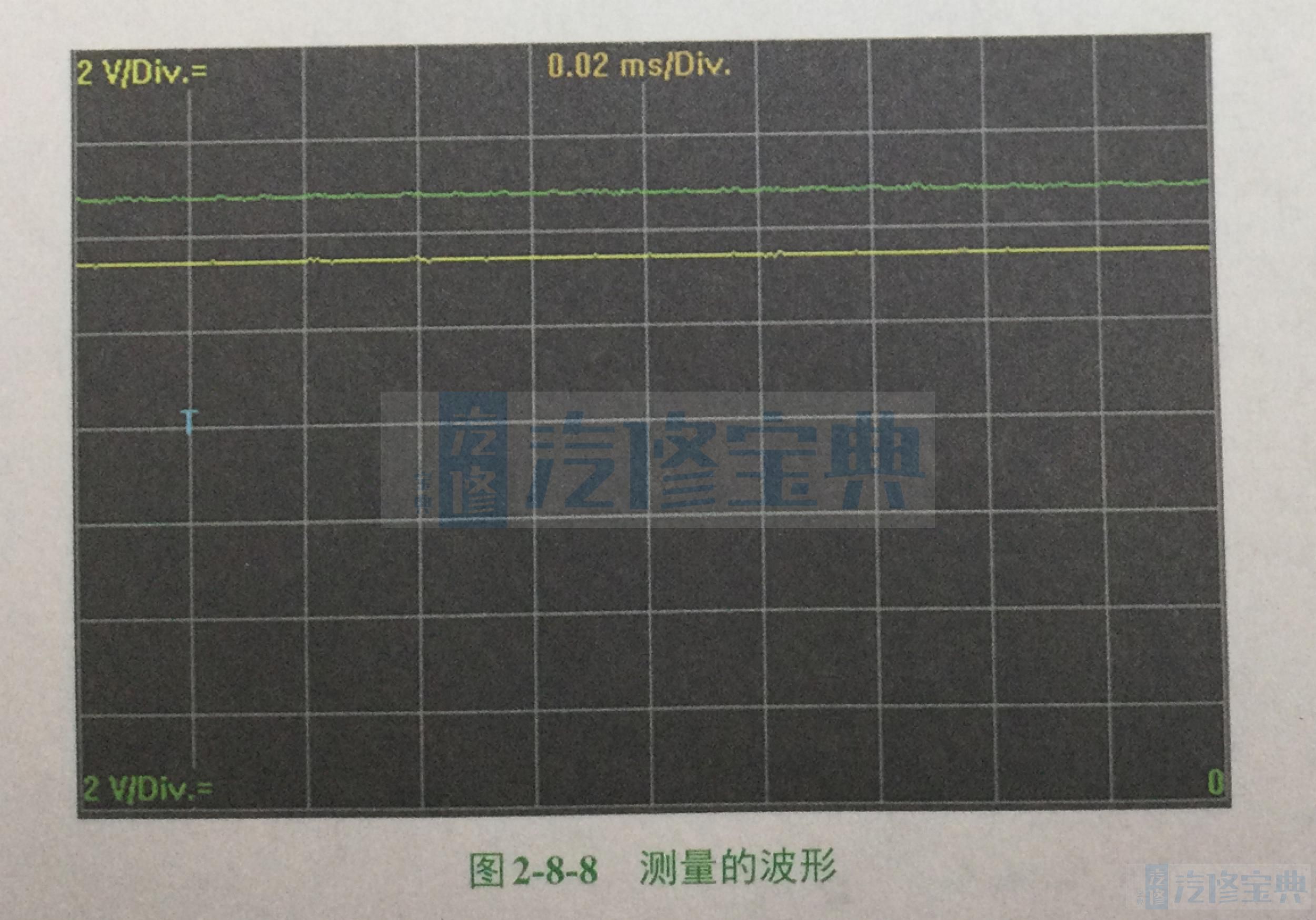
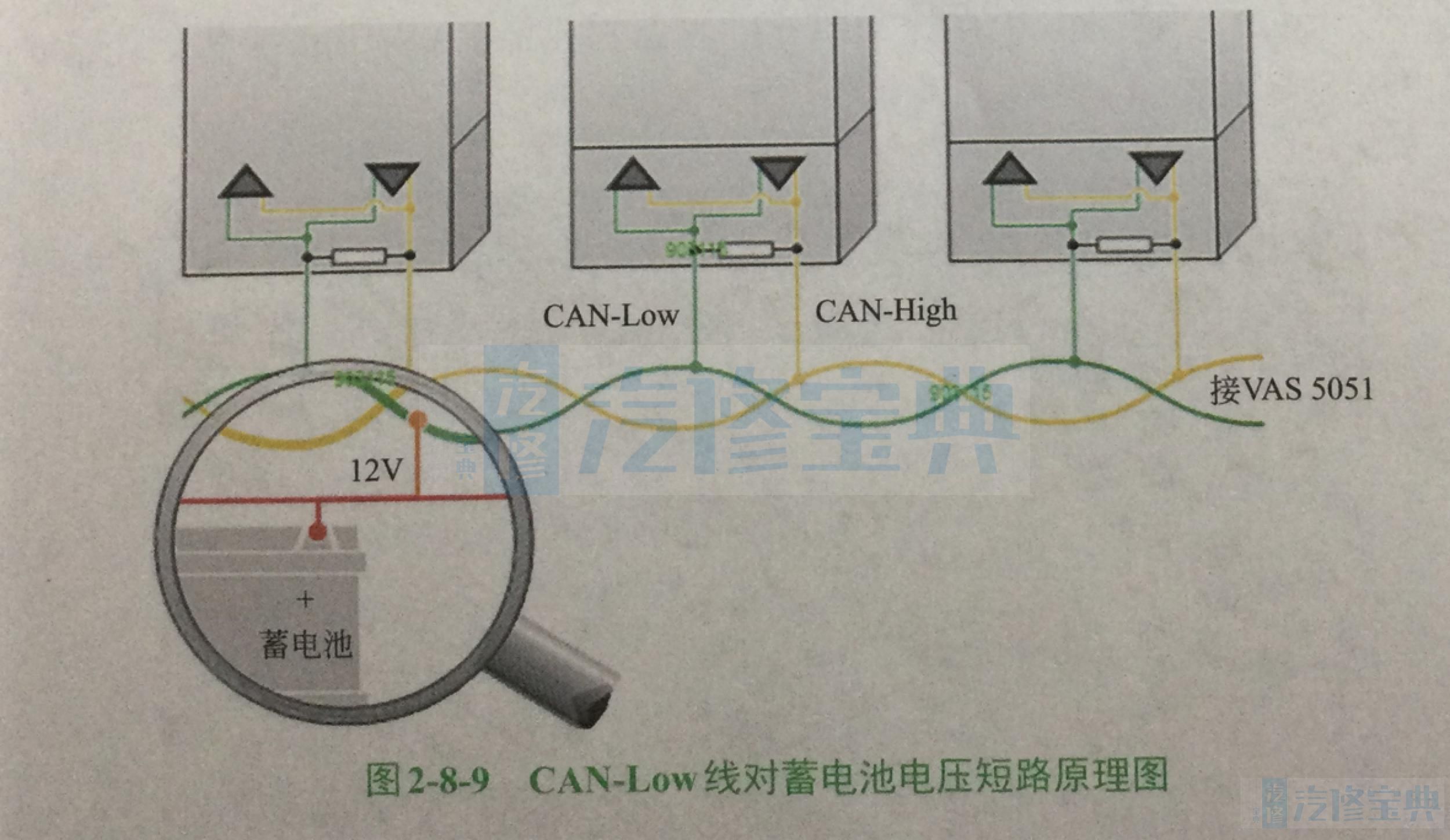
(3)CAN-Low线对蓄电池电压短路故障:
诊断仪上显示“ Datenbus- Antrieb defekt”(驱动数据总线损坏)。故障存储器内记录的是所有控制单元的故障内容(图2-8-8)。
CAN-Low线对蓄电池正极短路时, CAN-LOW线的电压为12V,CAN-High线的电压接近12V(图2-8-9)。
故障查寻的方法如下。
检查一下,看看接线柱30和15的导线是否有短路处。
可能的话可目视检查导线,看是否有短路处。
分别拔下各个控制单元,看看短路是否仍然存在。
尽可能将数据总线分成很多段,以便找出短路点。
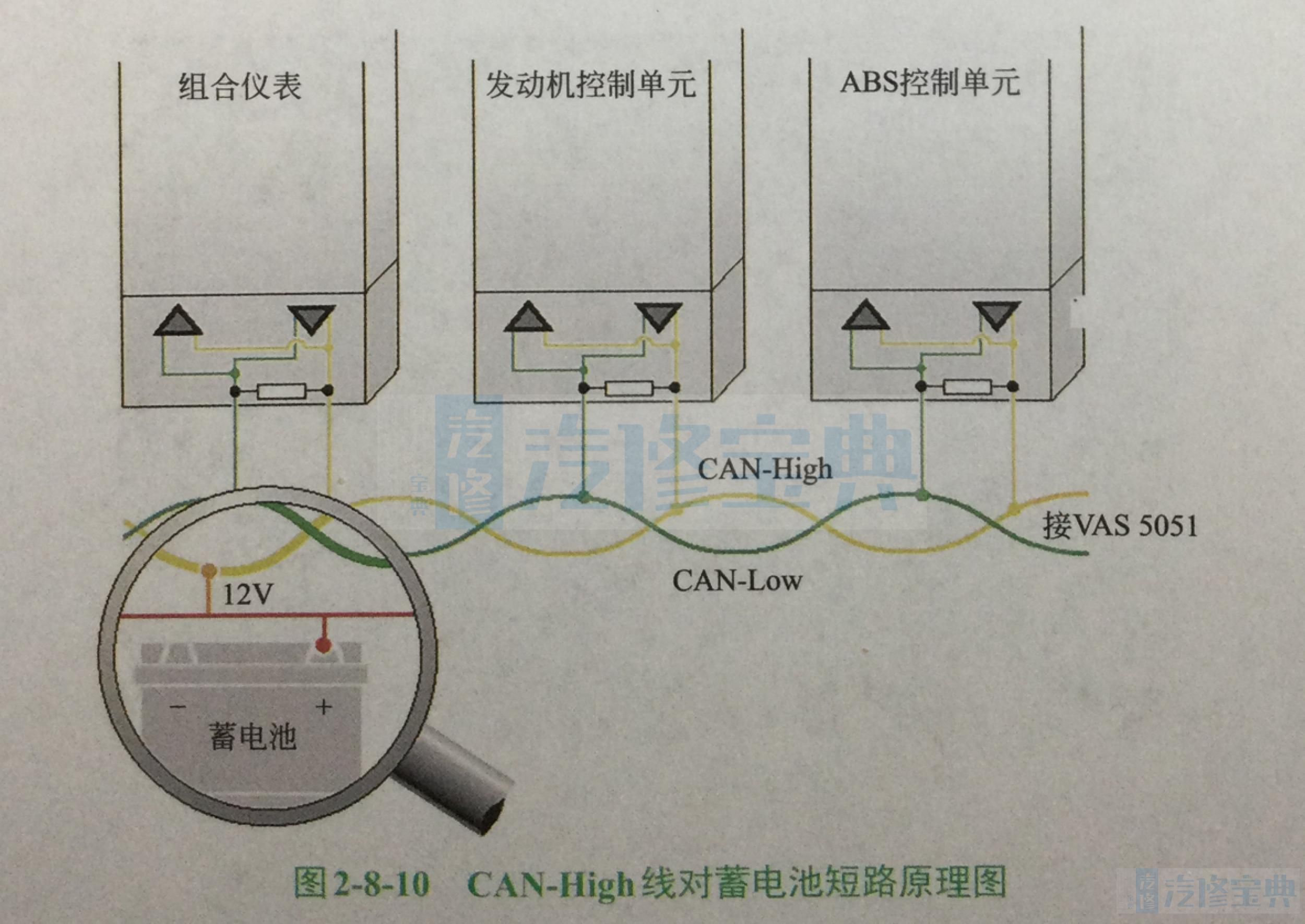
(4)CAN+ High线对蓄电池电压短路故障:
CAN-High线对蓄电池短路原理图如图2-8-10所示。
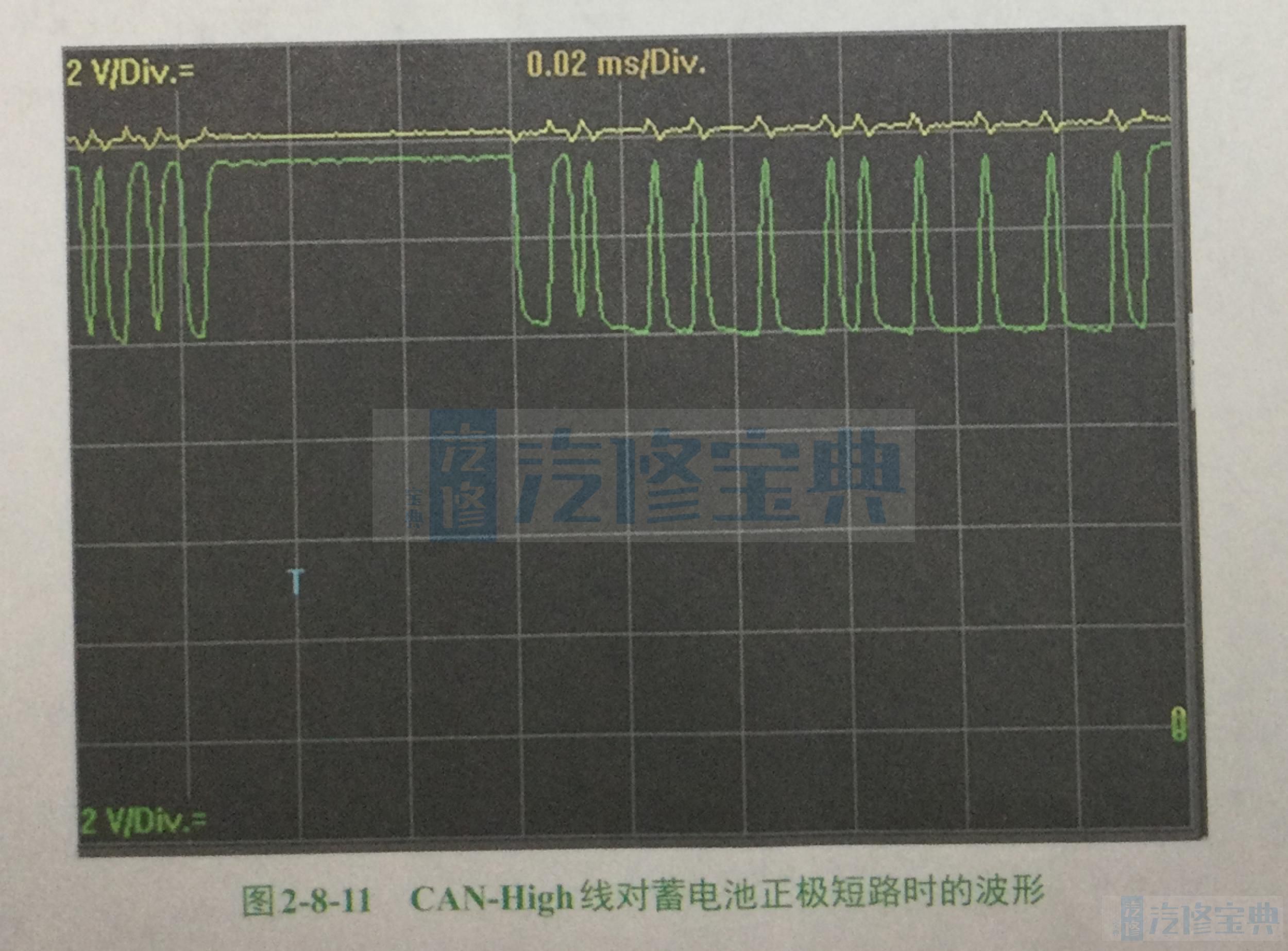
CAN-High线对蓄电池正极短路时,CAN-High线的电压为12V, CAN-LoW线的隐性电压接近12V。这是由于在控制单元的收发器内的 CAN-High线和 CAN-LOW线的内部连接关系引起的(图2-8-11)。
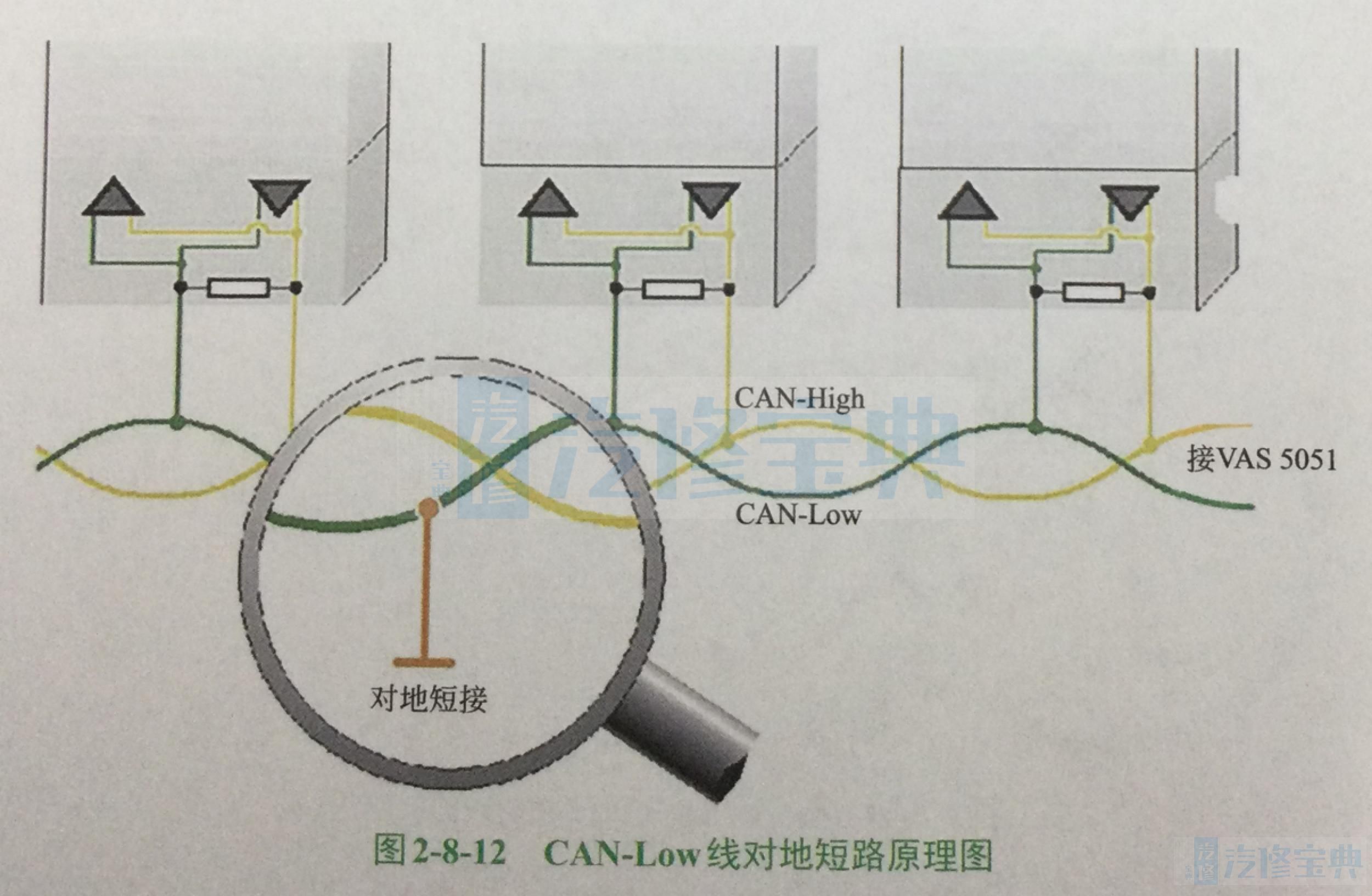
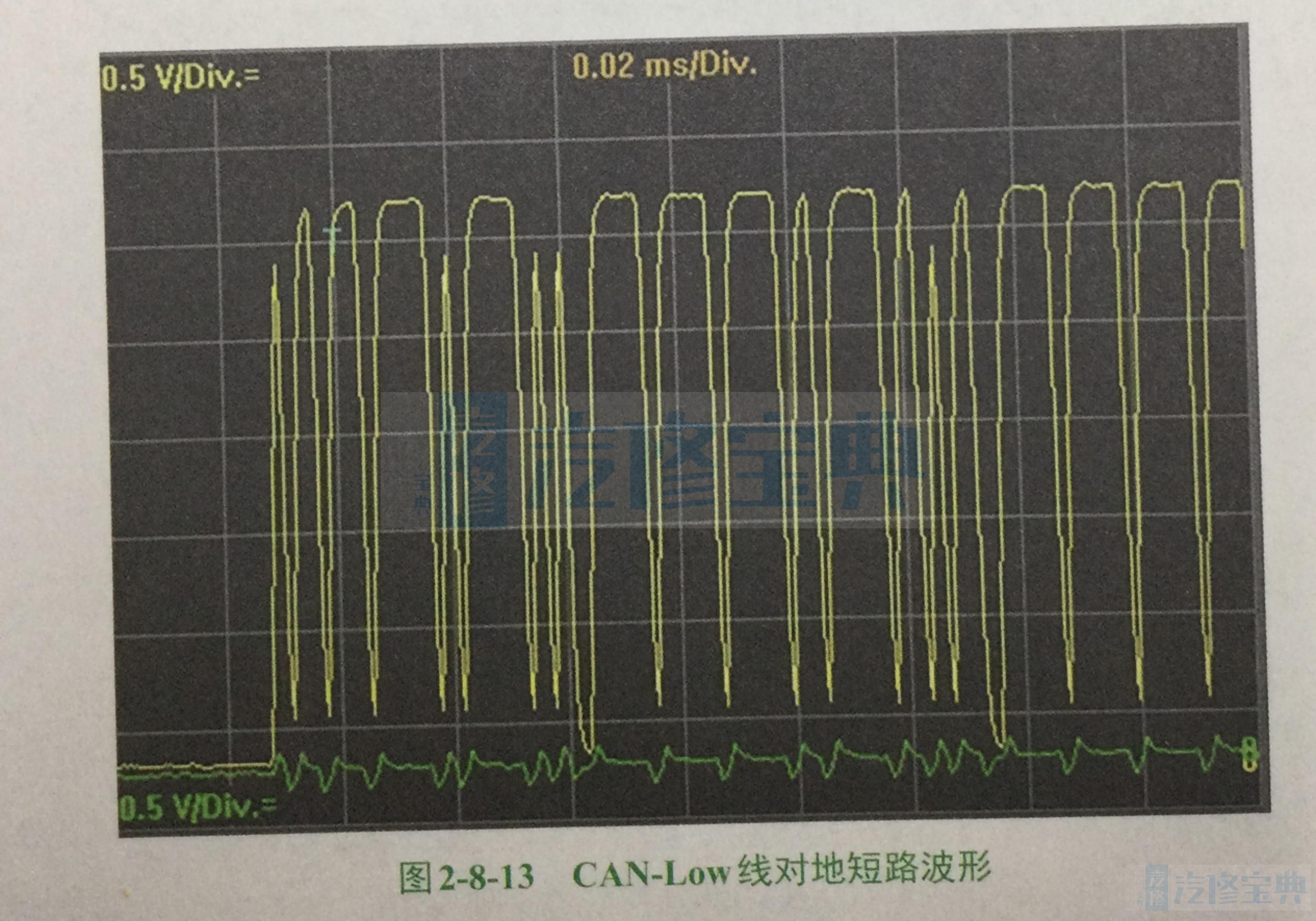
(5)CAN-Low线对地短路故障:
CAN-Low线对地短路原理图如图2-8-12所示。
CAN-LOW线对地短路时, CAN-LoW线的电压为0V, CAN-High线的隐性电压接近0V(图2-8-13)。
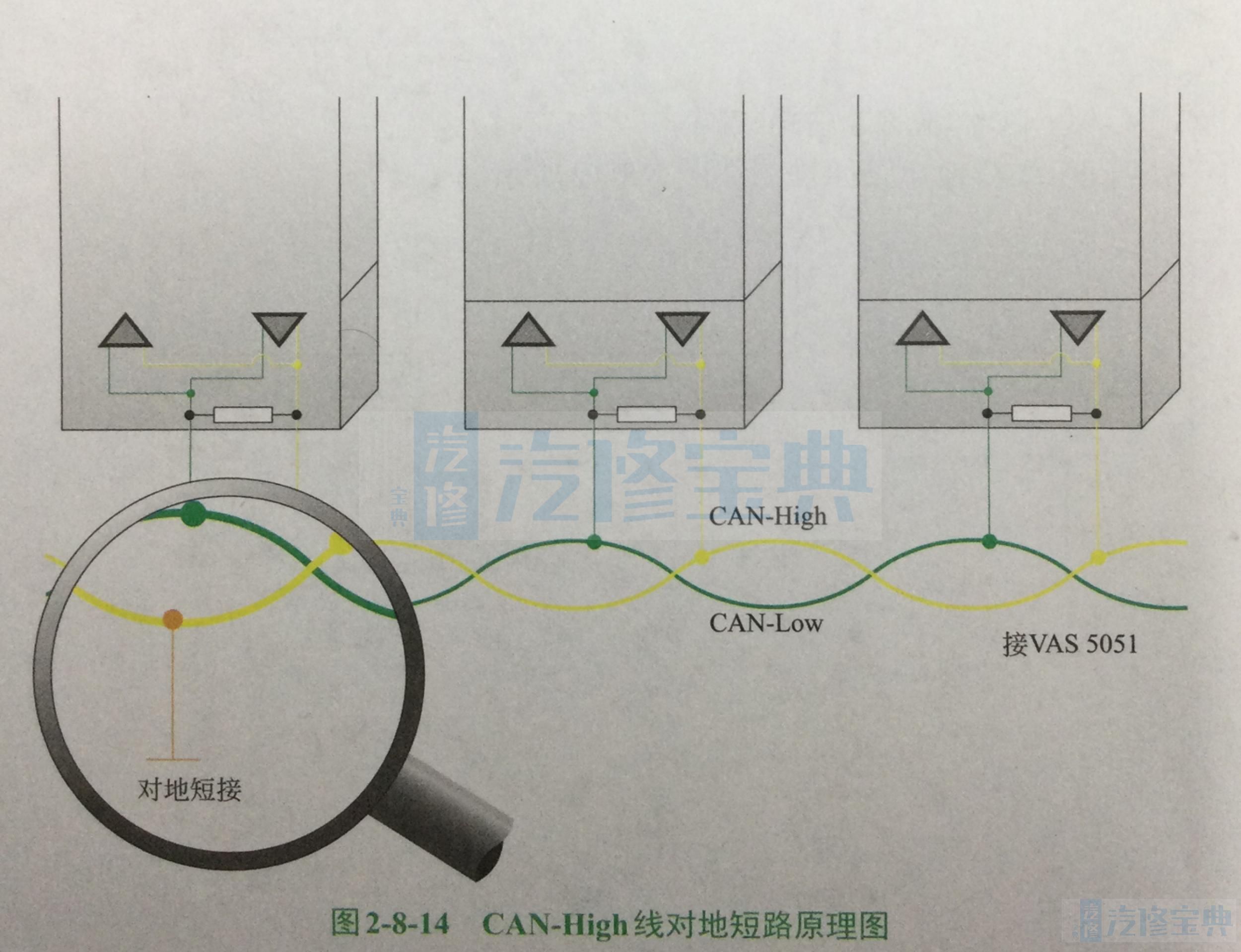
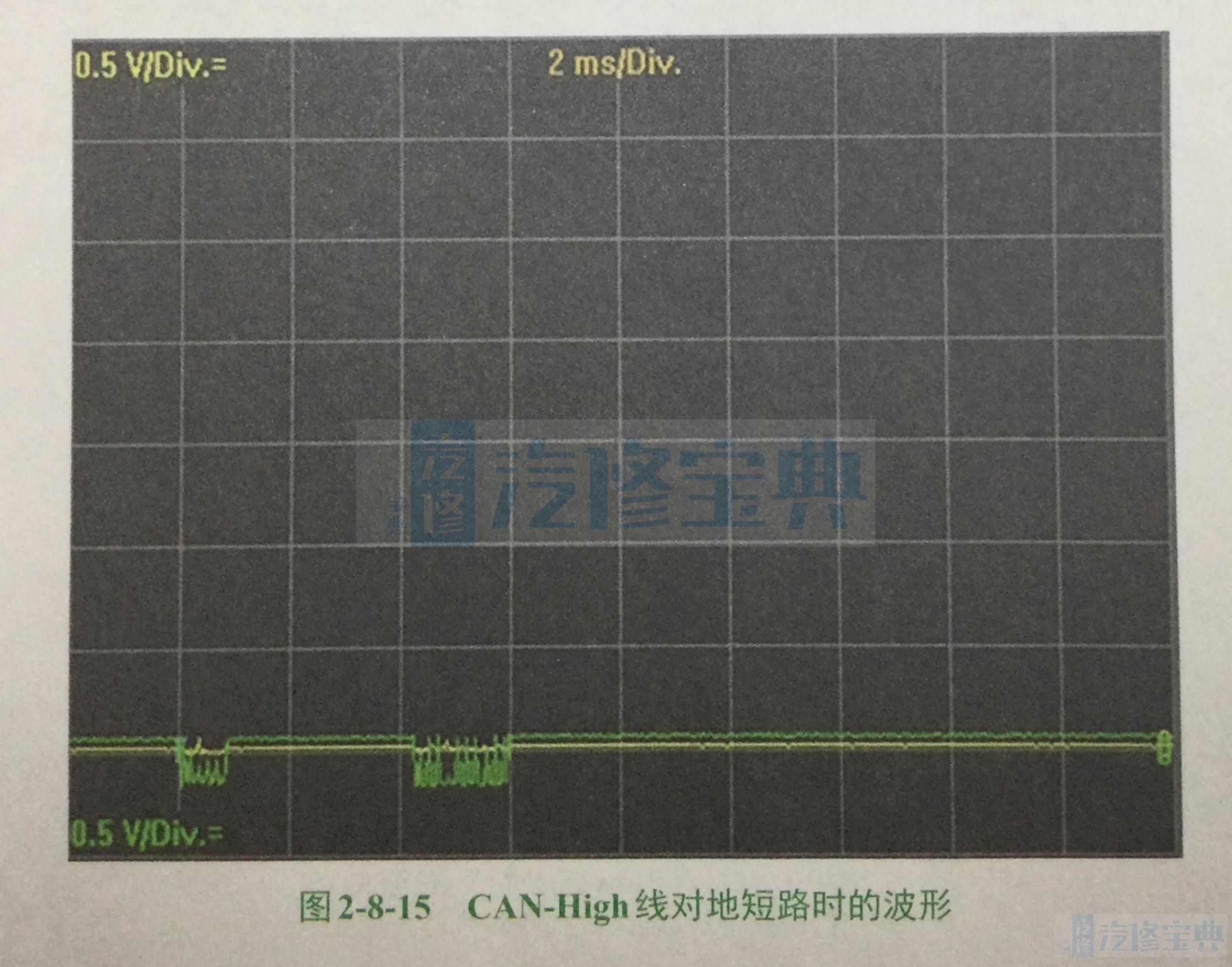
(6)CAN-High线对地短路故障:
CAN-High线对地短路原理图如图2-8-14所示。
CAN-High线对地短路时, CAN-High线的电压为0V, CAN-LOW线的电压也接近0V,但在 CAN-LOW线上还有一个很小的电压(图2-8-15)。
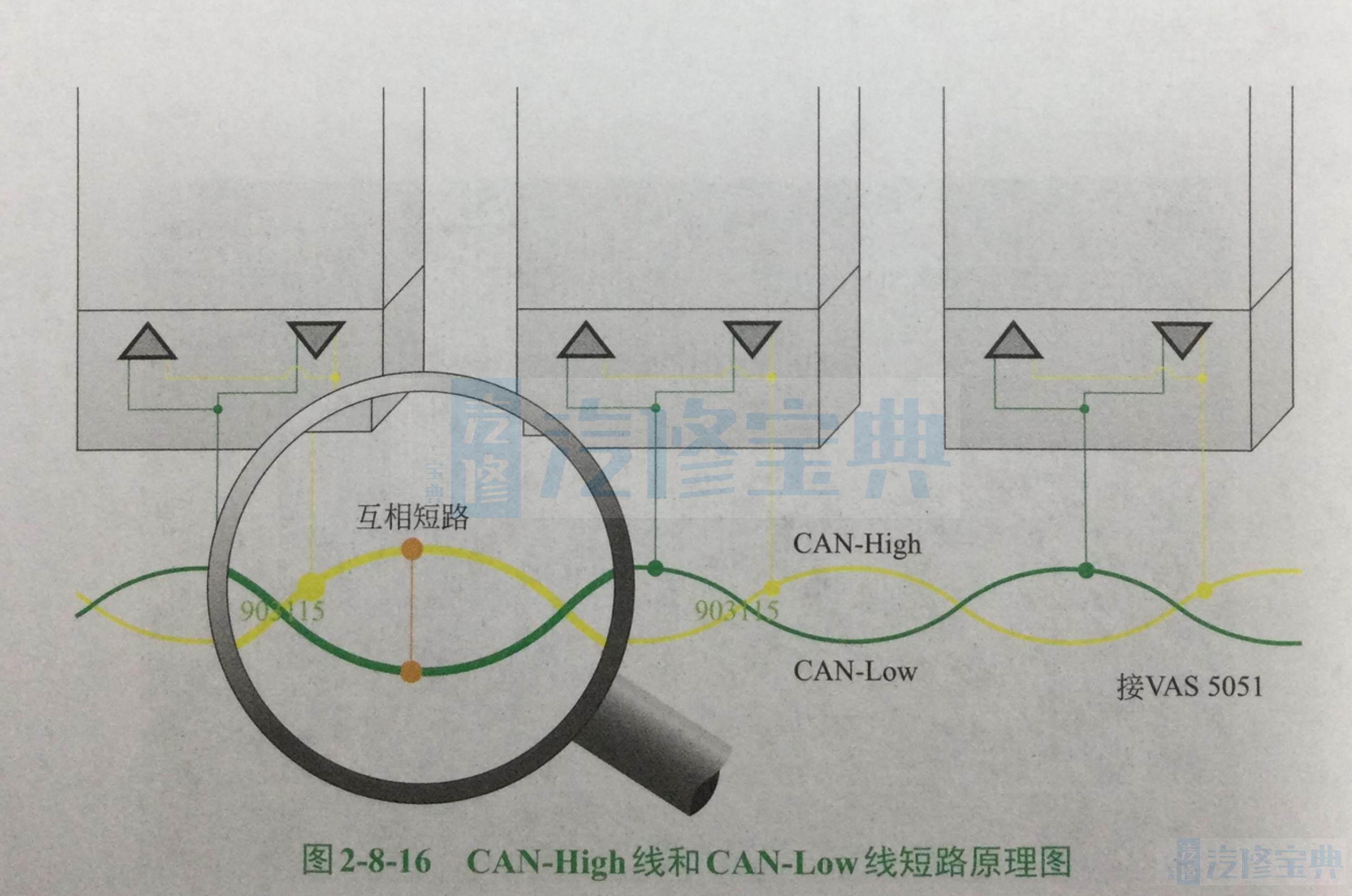
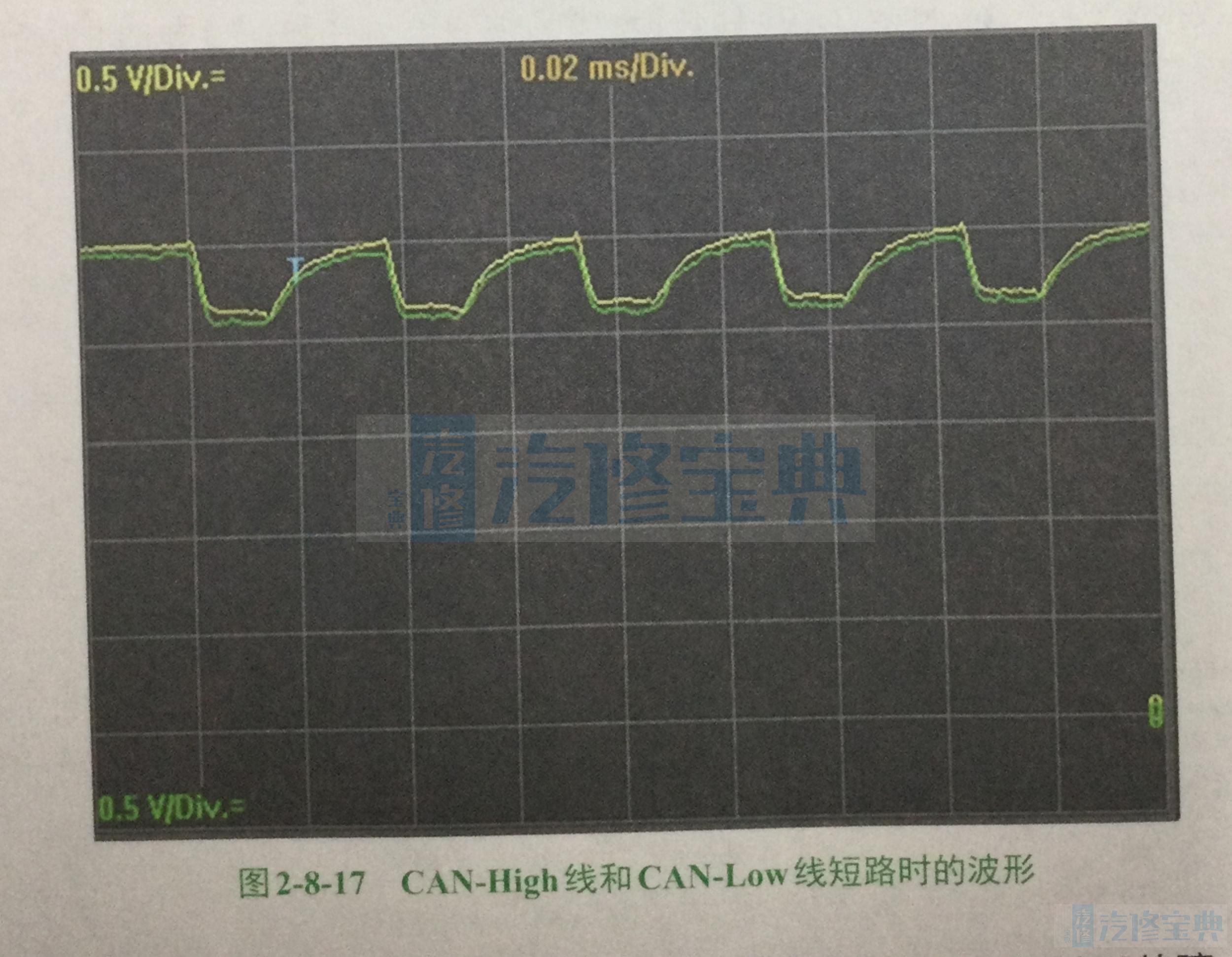
(7) CAN- High线和CAN-Low线短路故障:
CAN-High线和CAN-Low线短路原理图如图2-8-16所示。
CAN-High线与 CAN-LOW线之间短路时, CAN-High线与 CAN-LOW线的电压置于隐性电压,均为2.5V左右(图2-8-17)。
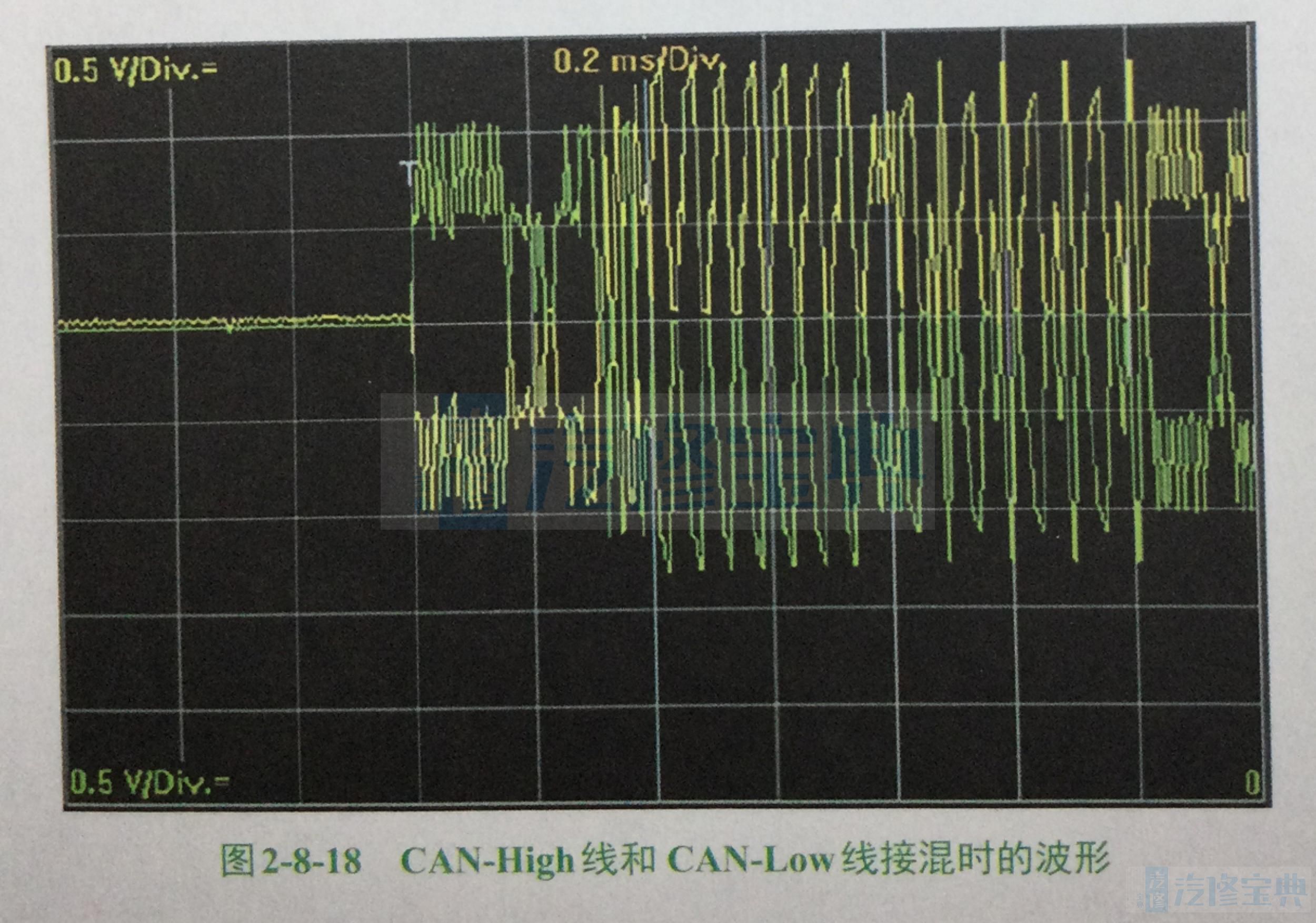
(8)一个或多个控制单元上的CAN-High线和CAN-LoW线接混故障:
当线接混时,CAN-Low线上会出现一条高于2.5V(静电平)的电压波形曲线,图2-8-18中也正是利用这个事实来显示的,如图2-8-18右侧, CAN-LOW线电压高于2.5V。诊断仪的诊断内容:“ Motorsteuergeraet kein Signal/Kommunikation”(发动机
控制单元无信号/通信)。
当一个控制单元或一组控制单元的 CAN-High线与CAN-Low线接混时,那么就无法进行数据交换了,CAN信息中断导致控制单元彼此相互干扰,这种情况积累多了就会产生“故障帧”(即 Error-Frames,就是CAN数据总线上的故障记录)(图2-8-19)。
6.舒适CAN总线的故障类型及波形:
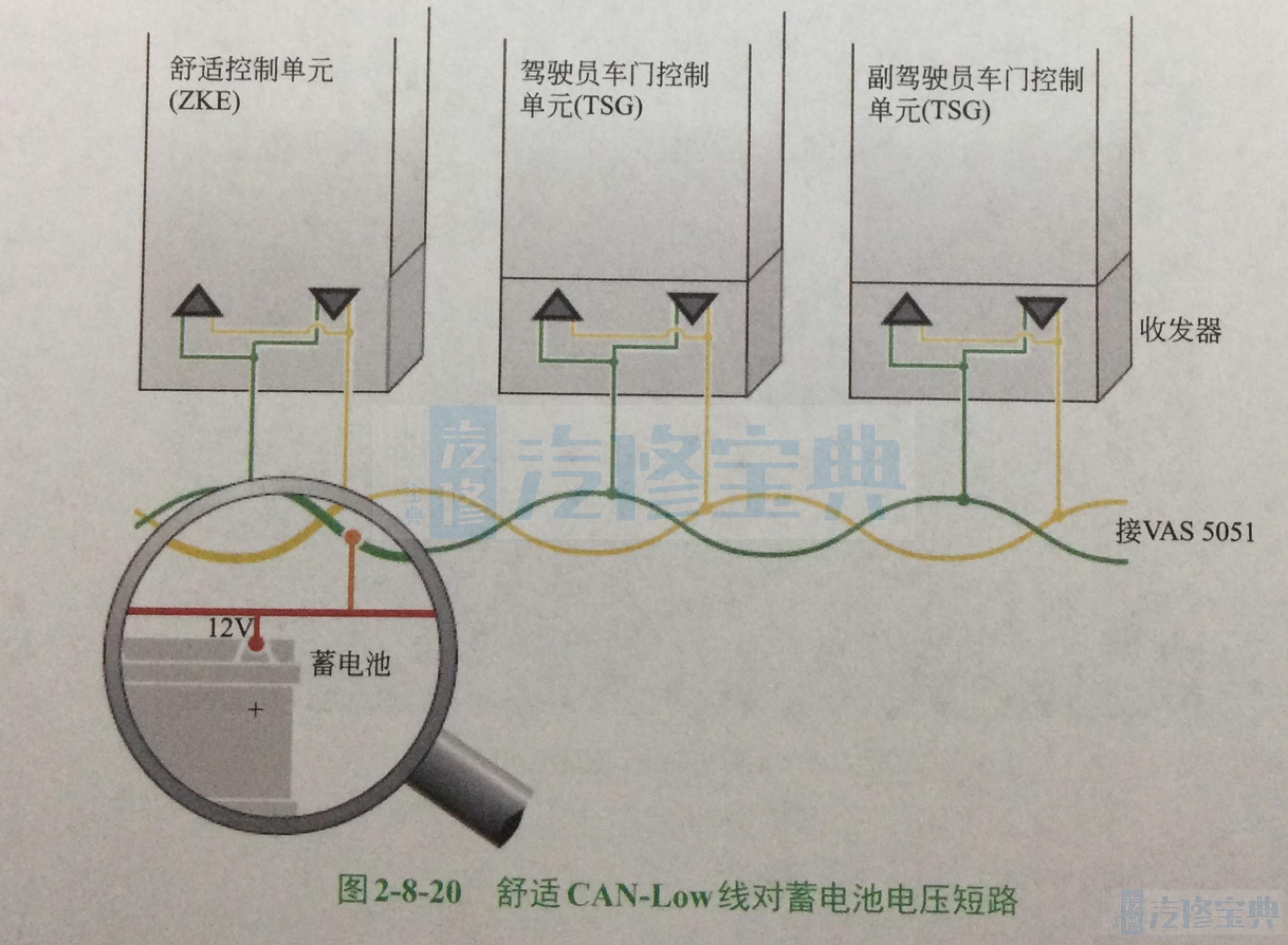
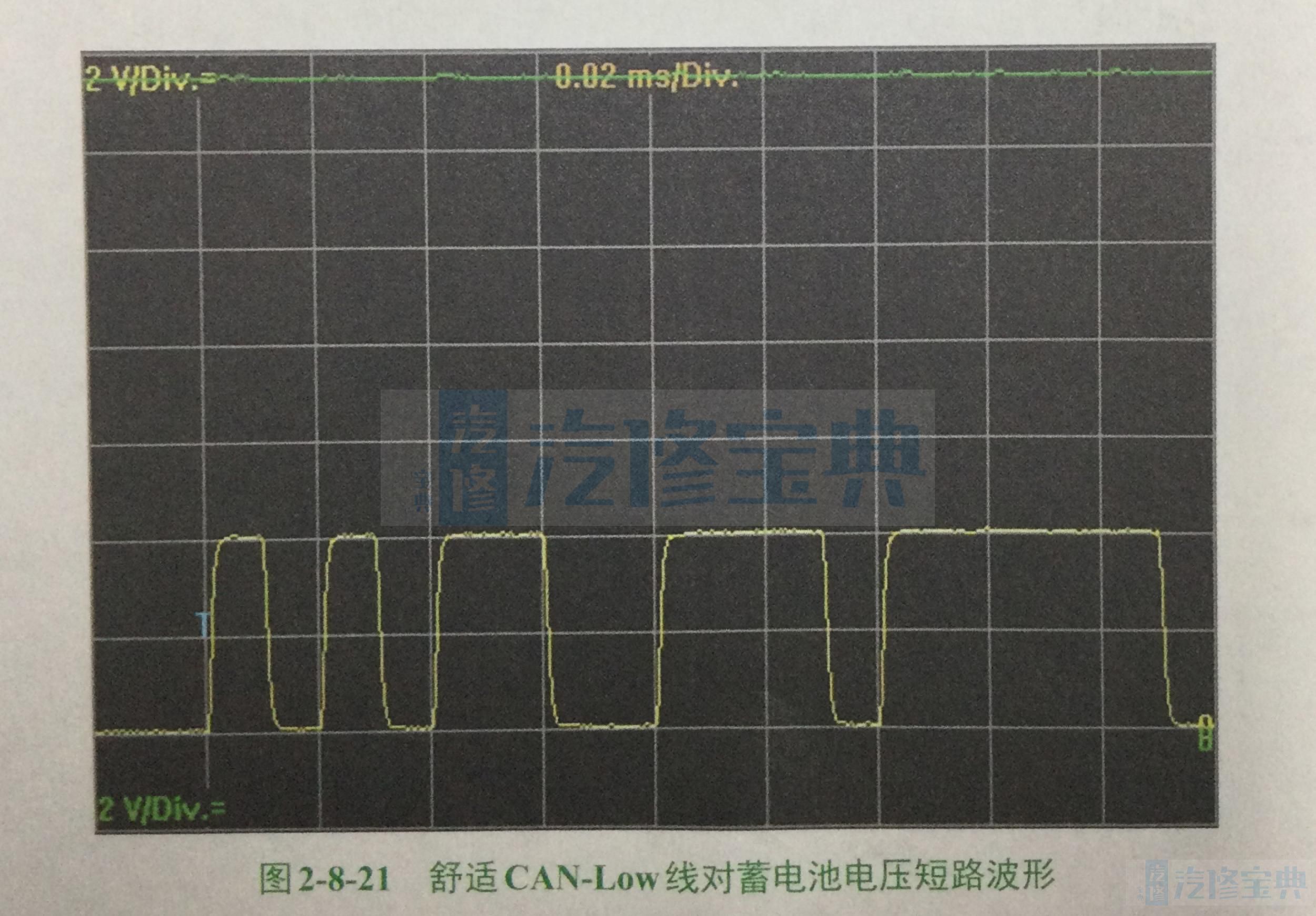
(1)舒适CAN-Low线对蓄电池电压短路故障:
诊断仪上的诊断结果为:“ Datenbus Komfort 1Draht”(舒适数据总线单线模
式)。在测量数据块内显示所有控制单元都处于单线模式,对于这种故障,典型的情况是:在DSO显示中, CAN-LOW线上作用有蓄电池电压,且 CAN-High线继续传送CAN信号。休眠模式与这种 CAN-LoW线对蓄电池电压短路的区别在于:CAN-High线上的电平恒为0V,无明显波动(图2-8-20和图2-8-21)。
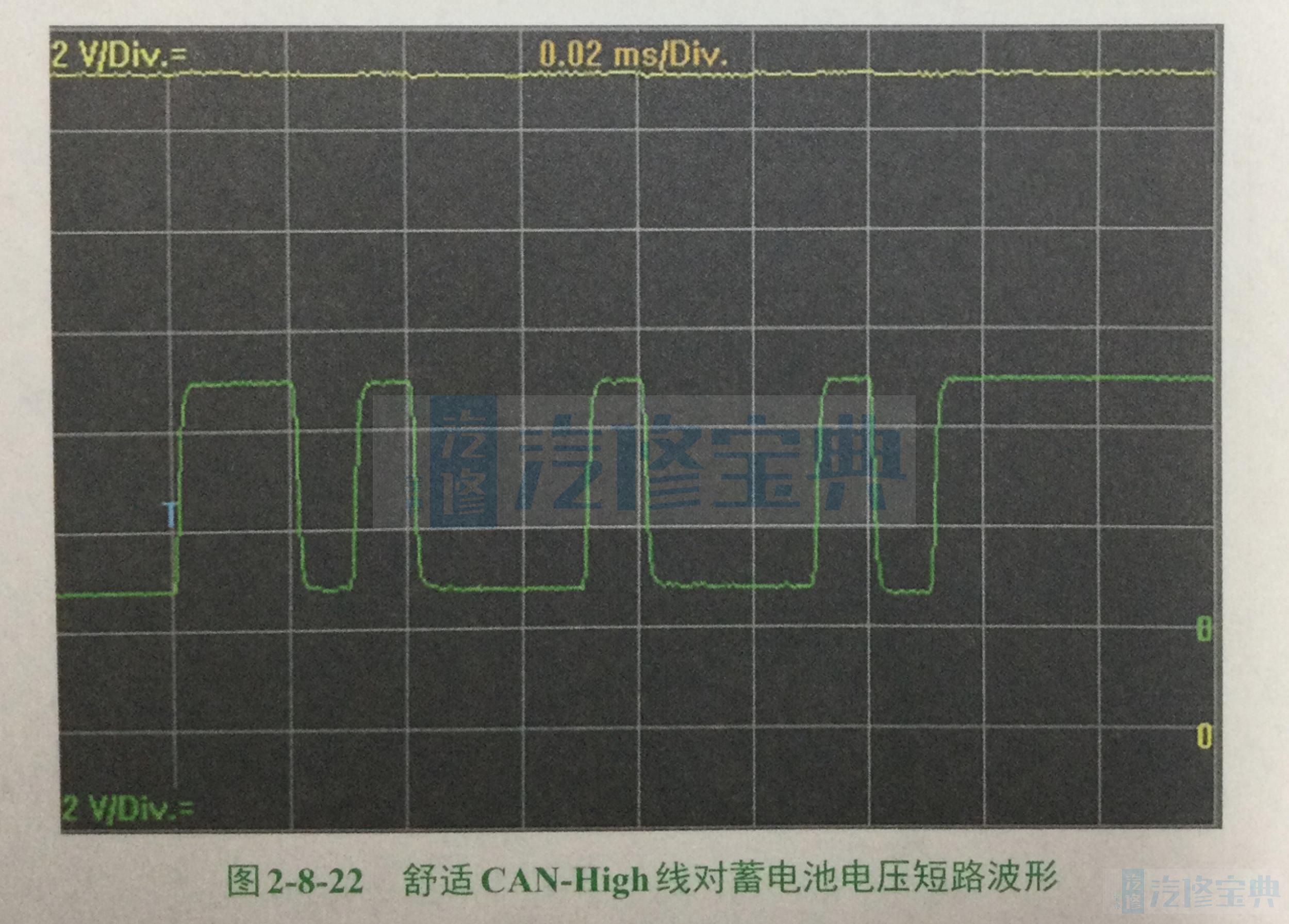
(2)舒适 CAN-High线对蓄电池电压短路故障:
CAN-High线的电压电位大约为12V或者为蓄电池电压,CAN-Low线的电压电位正常,在故障情况下,所有的舒适CAN或者信息CAN变为单线工作模式(图2-8-22)。
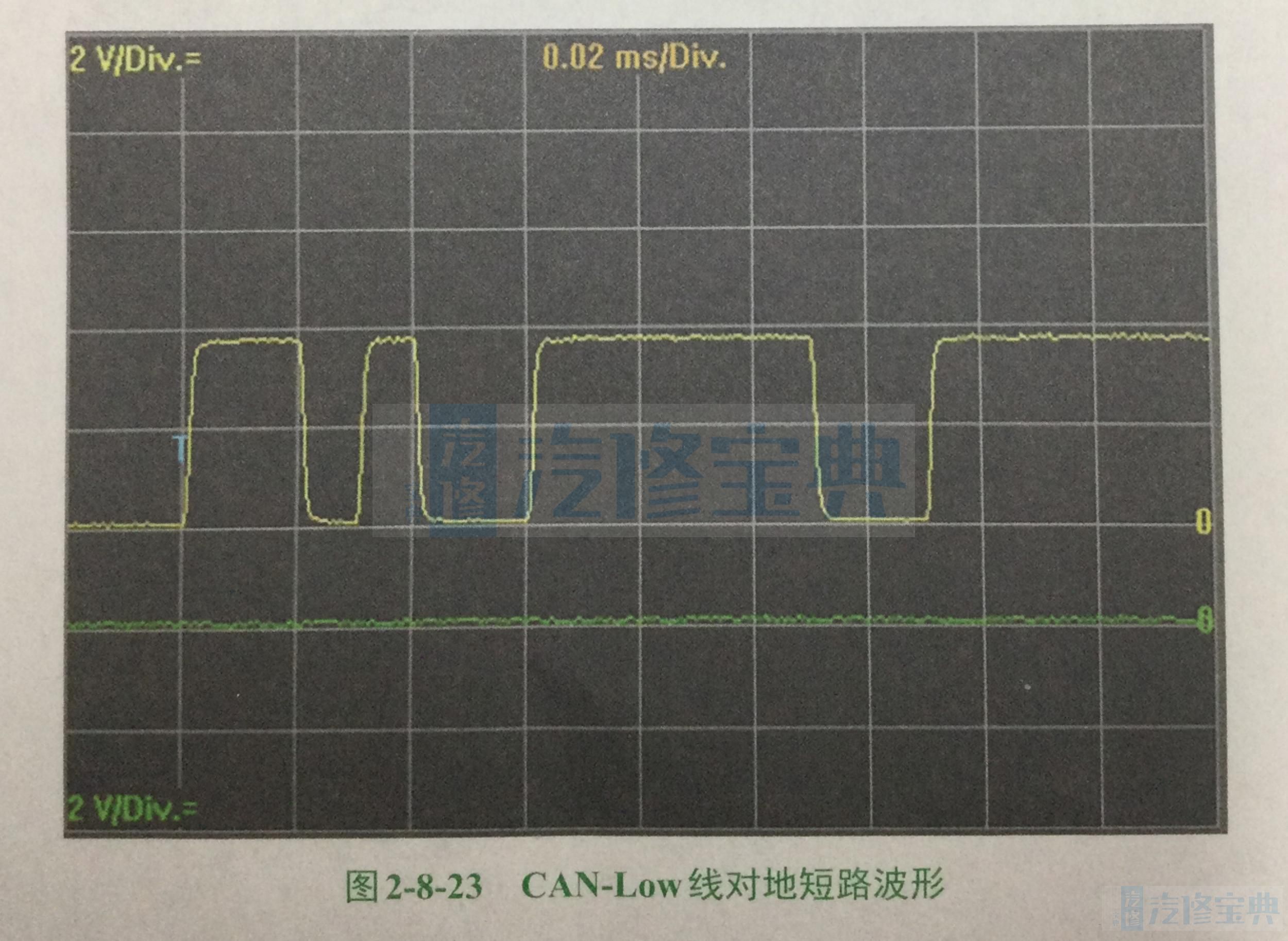
(3)CAN-LoW线对地短路故障:
CAN-LOW线与地短接的故障波形, CAN-LOW线的电压为0V, CAN-High线的电压正常。CAN-Low线与地短接时,舒适CAN系统总线变为单线工作(图2-8-23)。
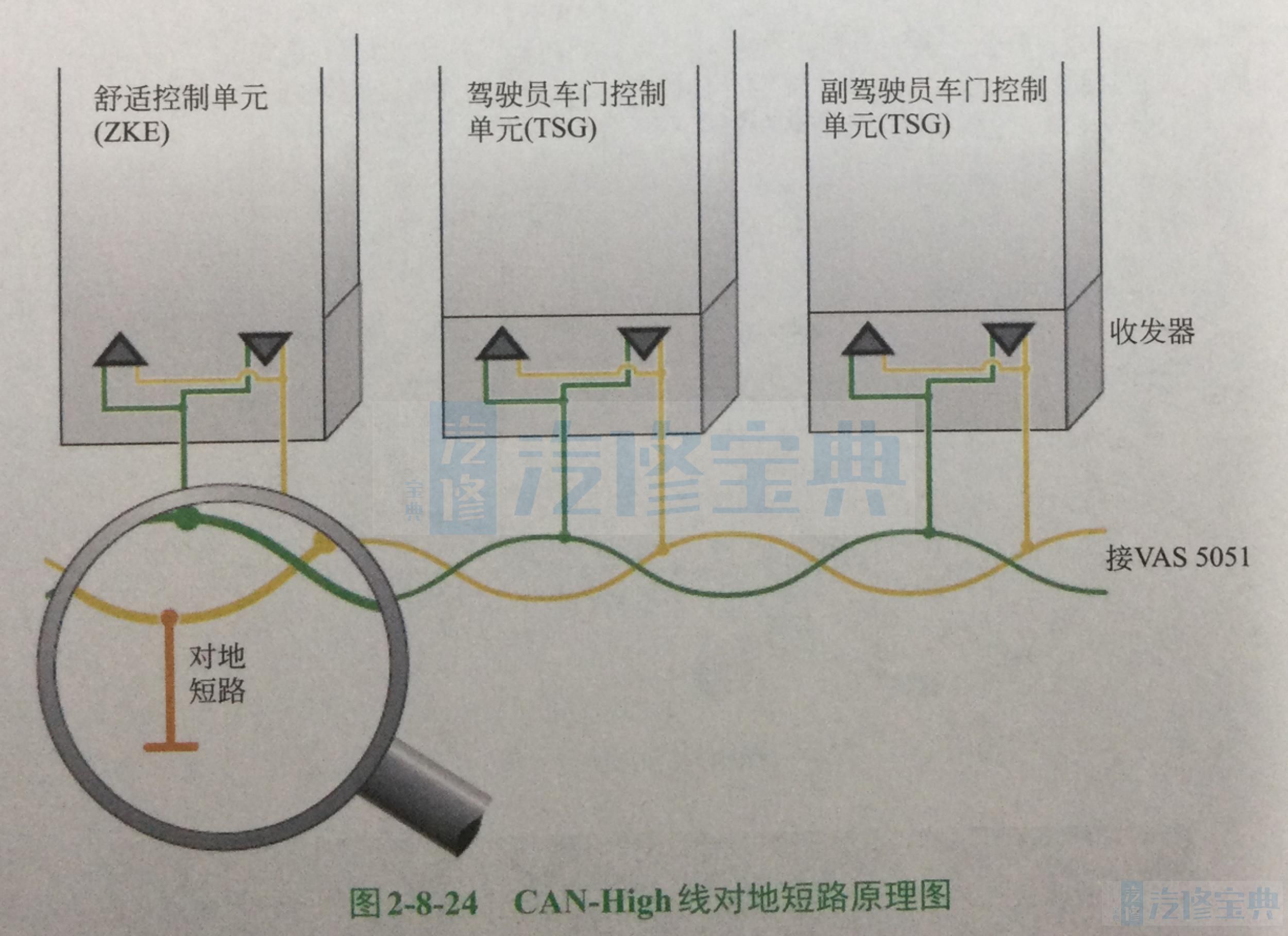
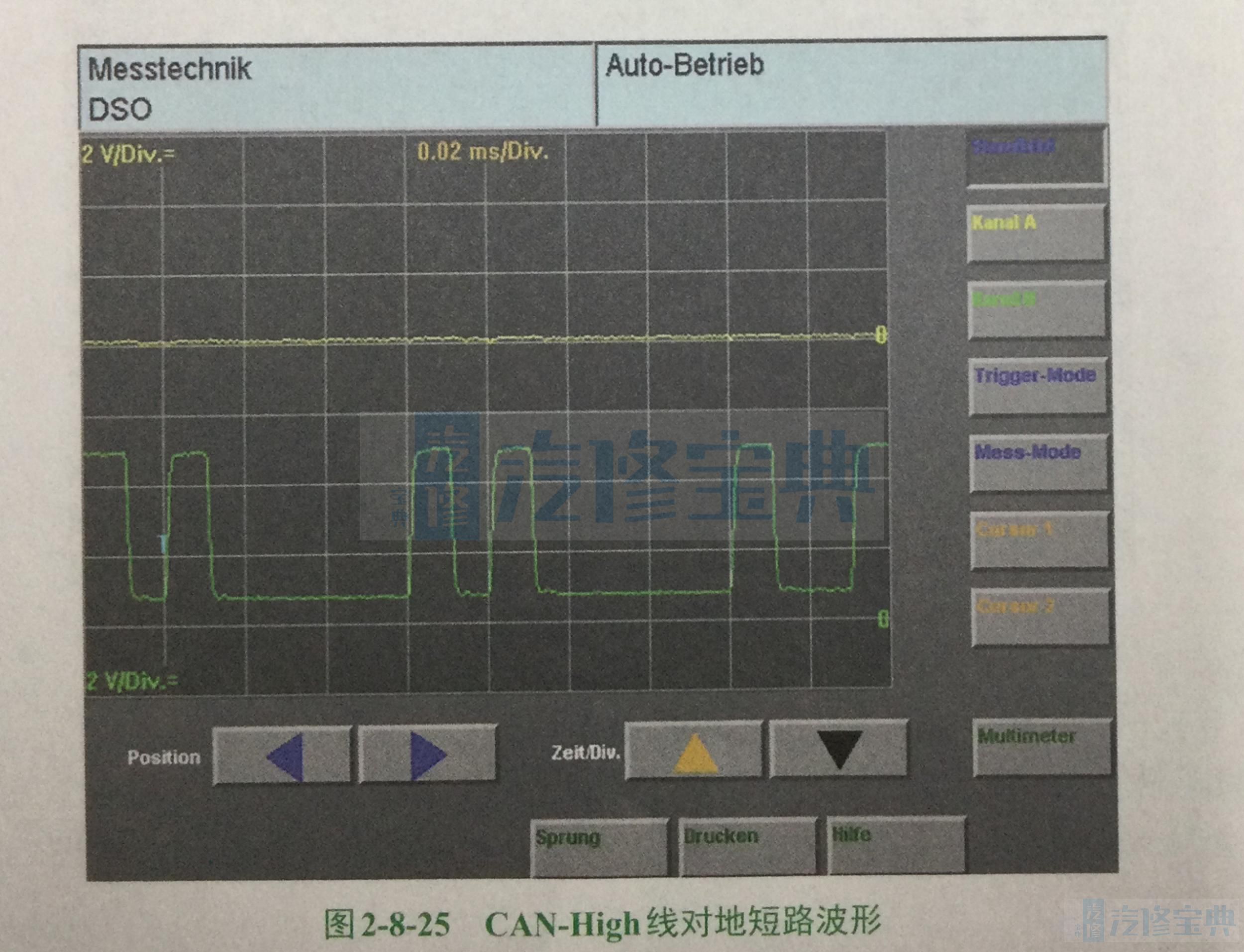
(4)CAN-High线对地短路故障:
CAN-High线与地短接的故障波形, CAN-High线的电压为0V, CAN-LOW线的电压正常。 CAN-High线与地短接时,舒适CAN系统总线变为单线工作(图2-8-24和图2-8-25)。
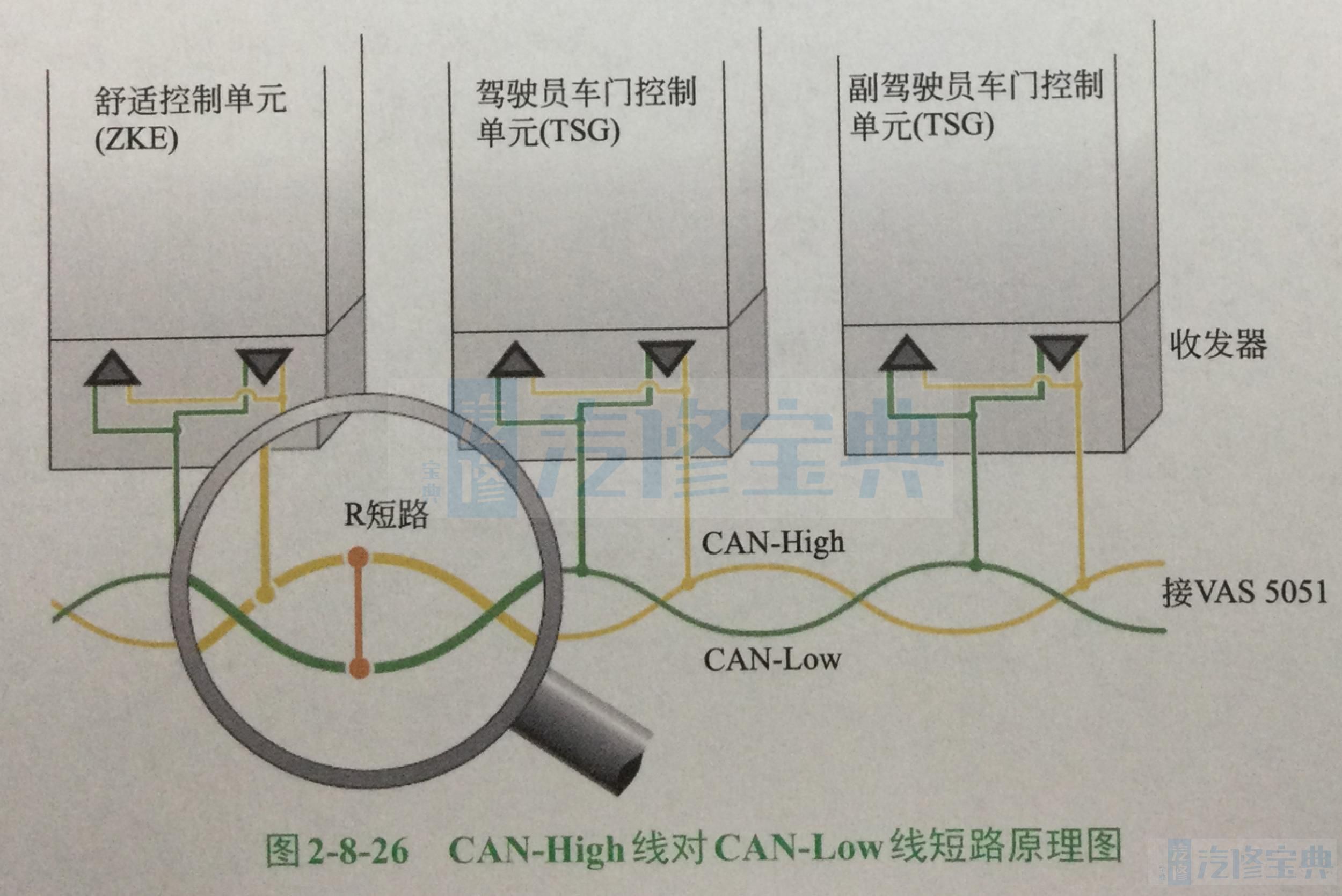
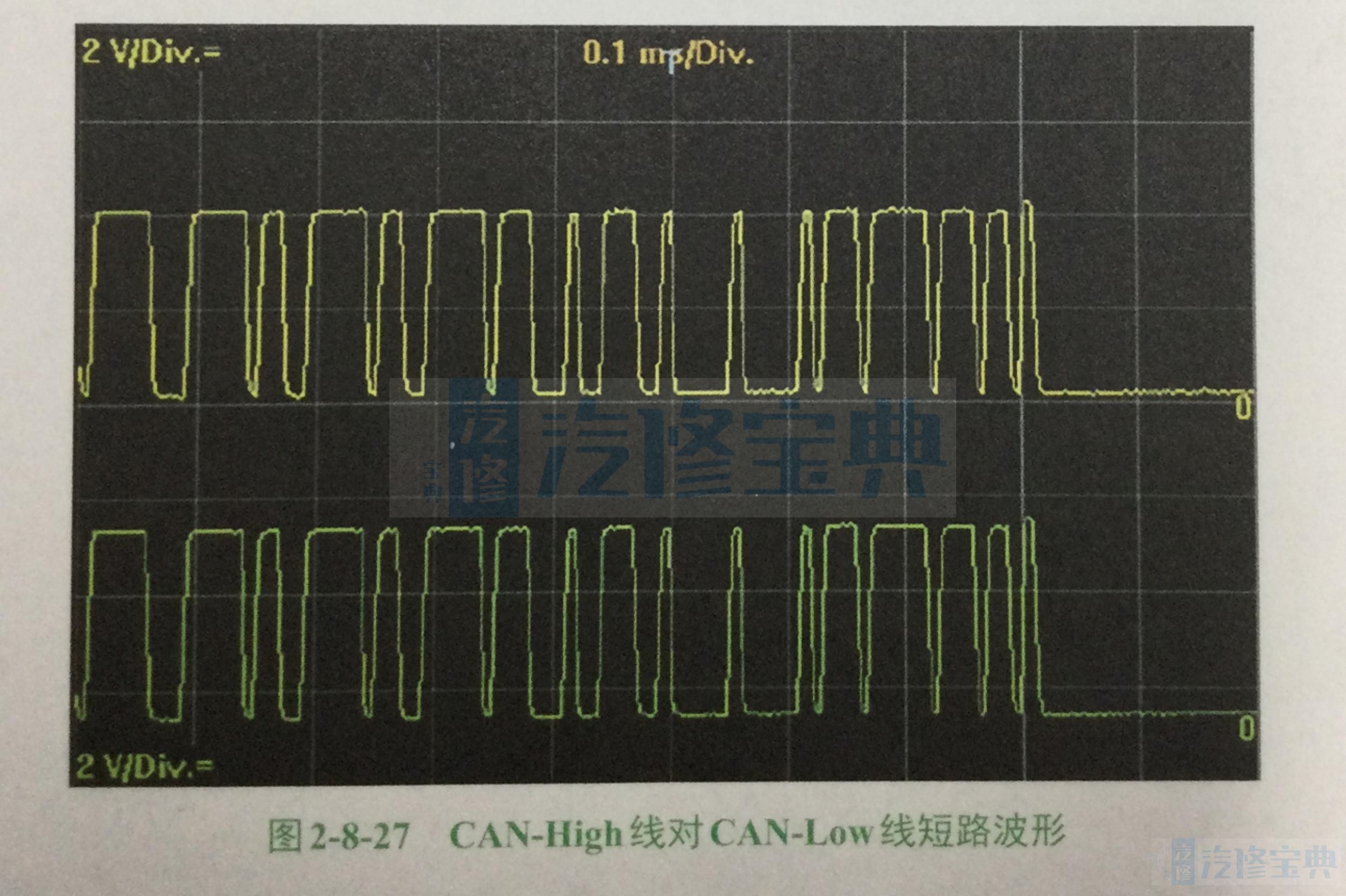
(5) CAN-High线对 CAN-LOW线短路故障:
CAN-LOW线与CAN-High线短路的故障波形, CAN-High线和 CAN-LOW线的电压相同, CAN-High线与CAN-Low线之间短路影响所有的低速CAN总线的通信,舒适CAN总线因此而单线工作(图2-8-26和图2-8-27)。
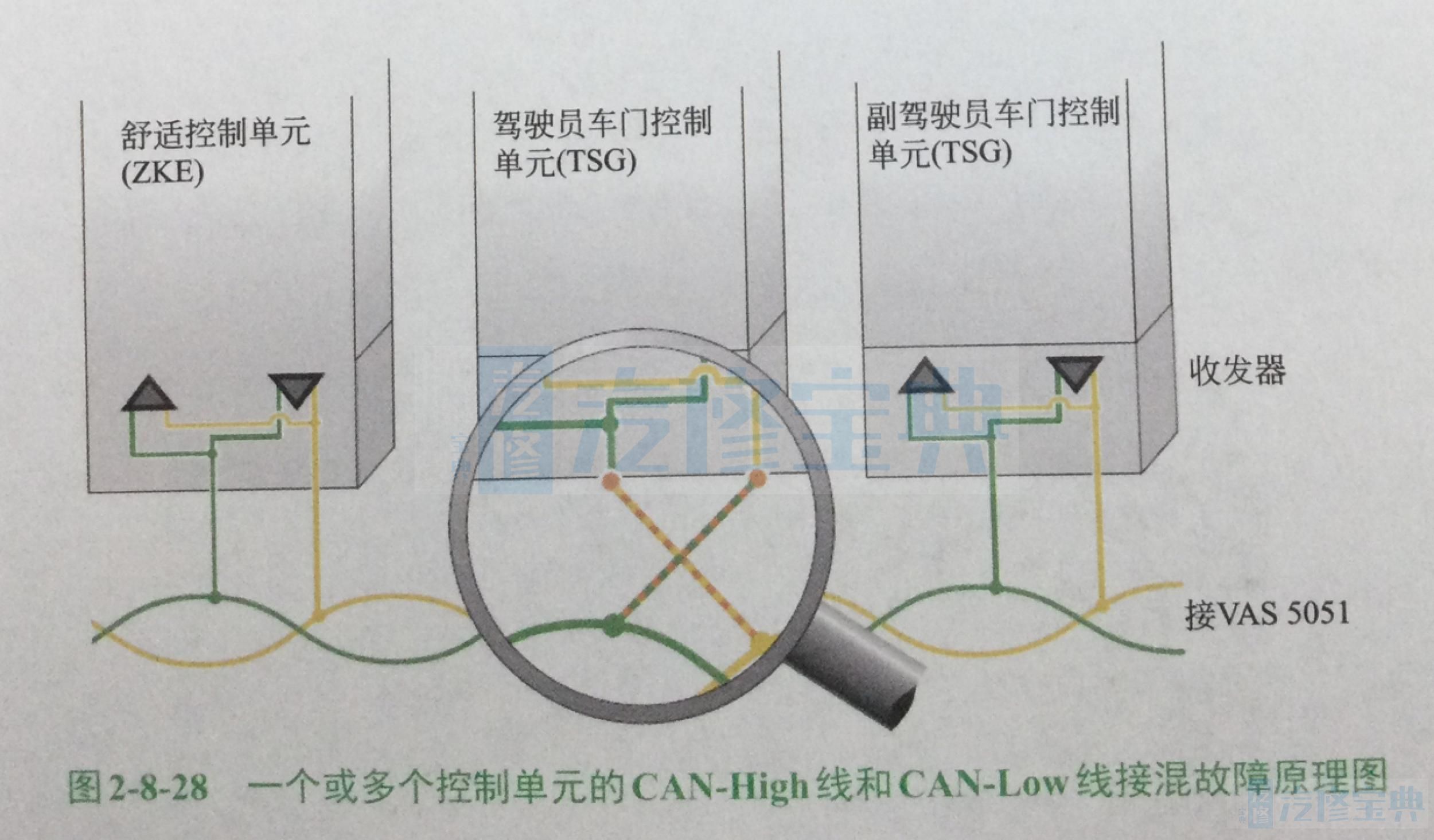
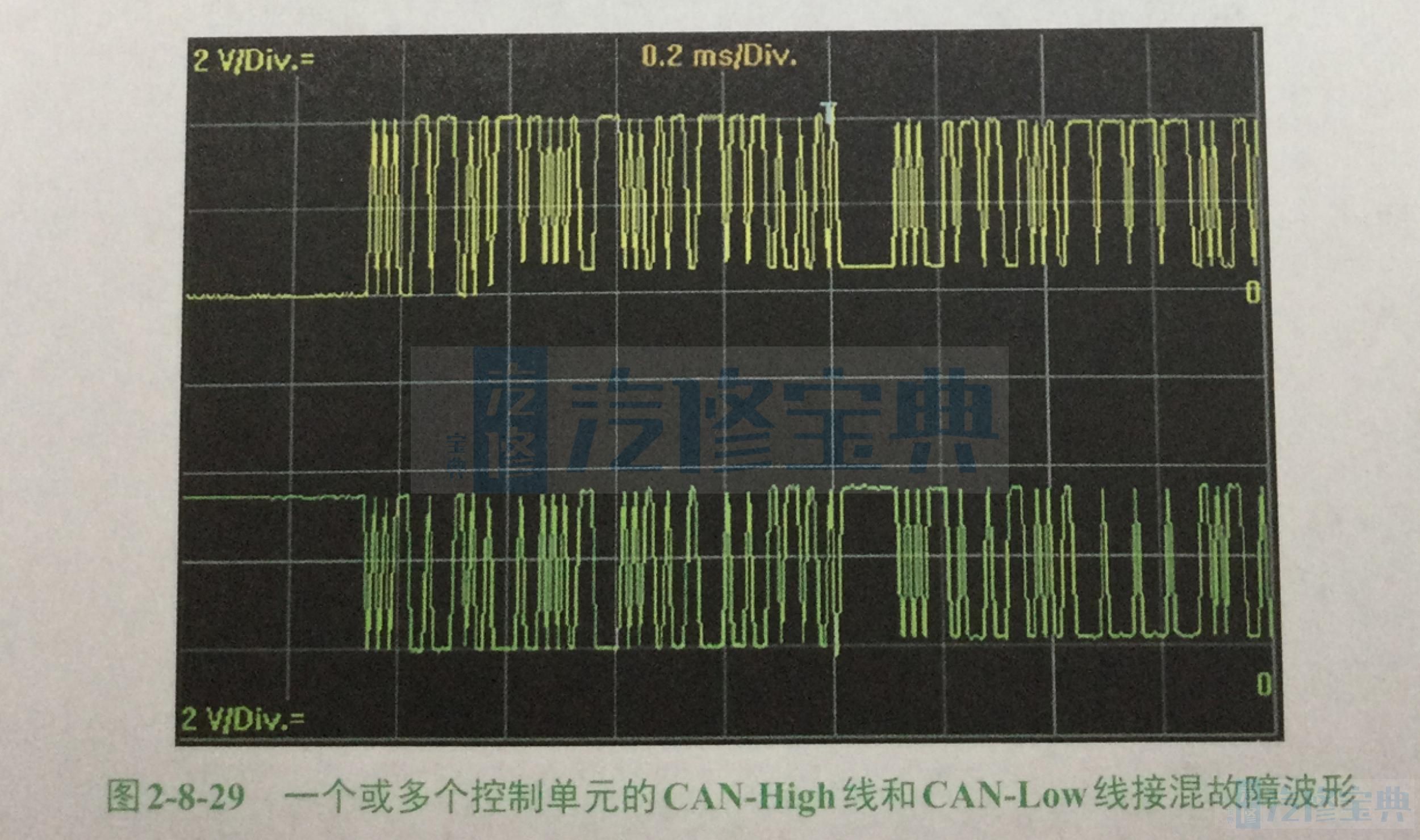
(6)一个或多个控制单元的 CAN-High线和CAN-Low线接混故障:
此故障的波形特点是,隐性电平有一个偏移。在隐性状态,某控制单元的导线接混会导致CAN-High线上的电压升高和 CAN-LOW线上的电压下降(图2-8-28和图2-8-29)。
确定故障位置步骤如下。
导线接混总是出现在最后一个能正常工作的控制单元和第一个不能正常工作的控制单元之间。
导线接混的故障大多出现在修理数据总线时,应重点检查这些地方。应根据导线的颜色进行目视检查。
进行故障排除前应断开蓄电池,因为在测量时,CAN舒适/ Infotainment数据总线可能会开始工作,这就会导致测量结果不准。然后可以用欧姆表来测量接混的CAN导线。
(7) CAN-LOW线断路故障:
CAN-LoW线的电压电位正常。在 CAN-LOW线上为5V的隐性电压电位和1bit长的1V显性电压电位。当一个信息内容被正确接收时,则控制单元发送这个显性电压
电位。在图2-8-30中显示由很多发送控制单元组成的系统。“A”部分是信息的一部分,该信息被一个控制单元所发送。在“B”时间点接收到正确的信息内容,则接收控制单元用一个显性的电压电位给予答复。在“B”时间点因为收到正确的信息,则所有控制单元都同时发送一个显性的电压电位,正因为如此,该1bit的电位差要大一些。
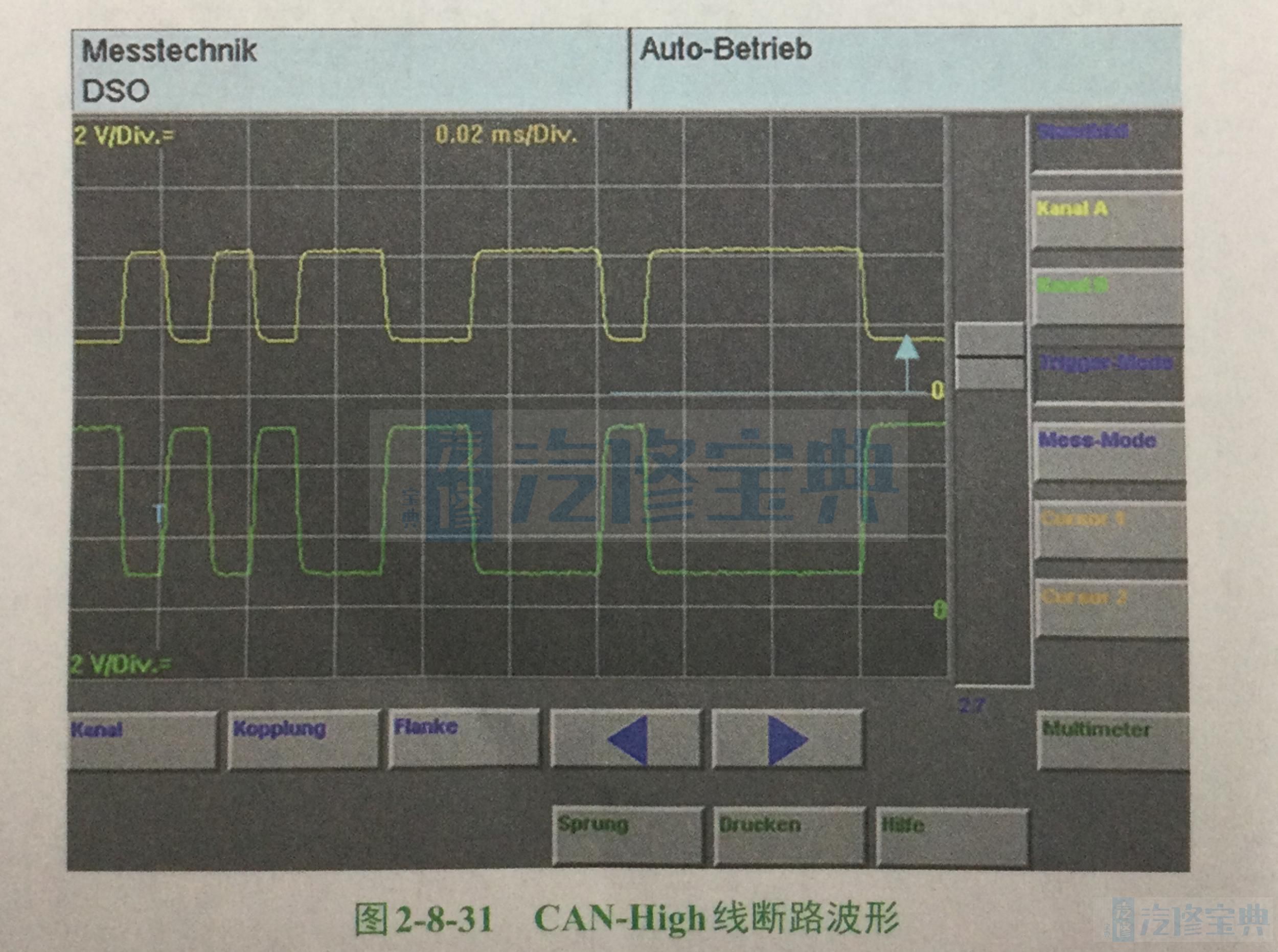
(8) CAN-High线断路故障:
CAN-High线断路波形如图2-8-31所示。
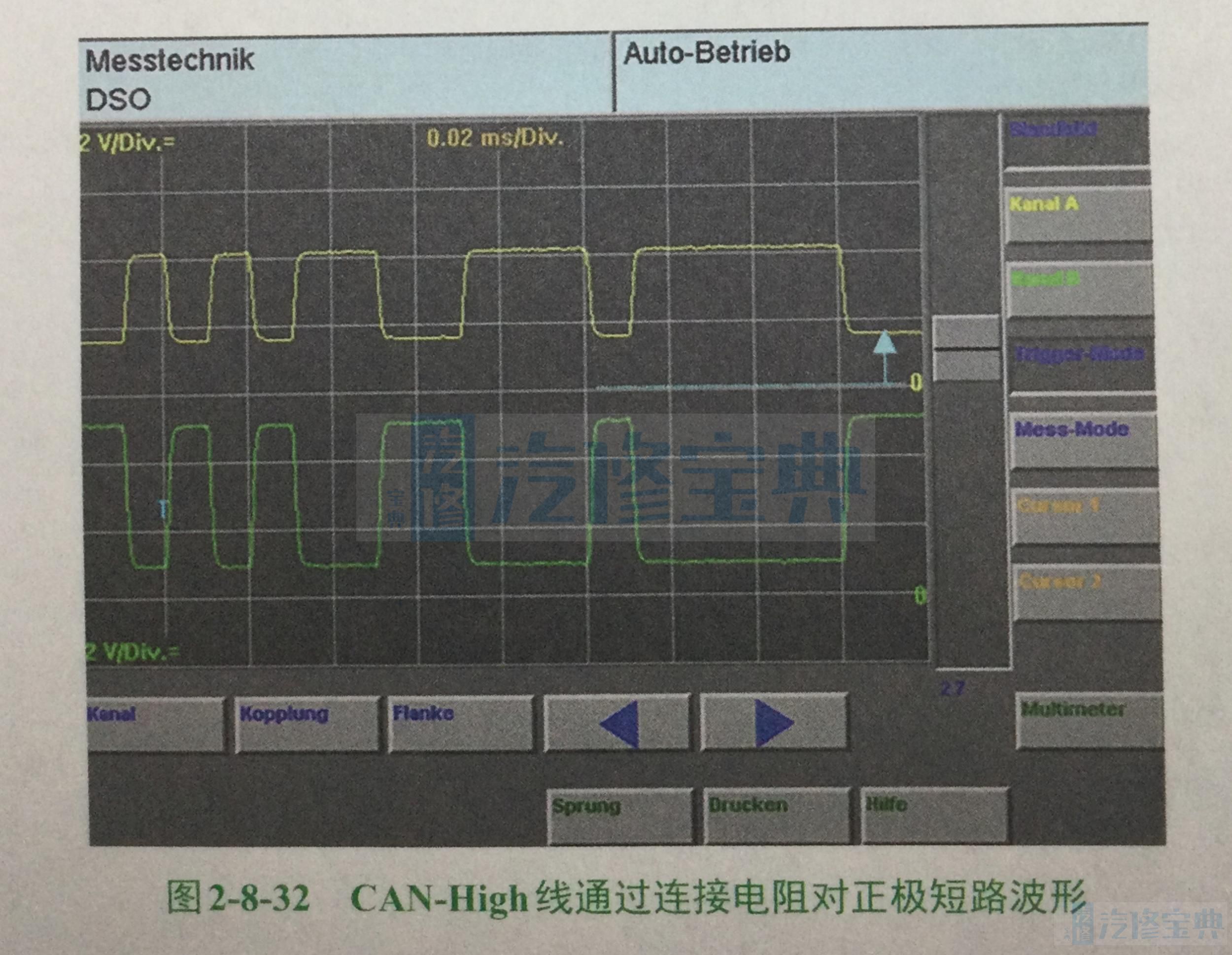
(9) CAN-High线通过连接电阻对正极短路故障:
CAN-High线的隐性电压电位拉向正极方向。在示波器可以看出, CAN-High线的隐性电压电位大约为1.8V,正常应为大约0V。该1.8V电压是由于连接电阻引起的。电阻越小则隐性电压电位越大。在没有连接电阻的情况下,该电压值为蓄电池电压(图2-8-32)。
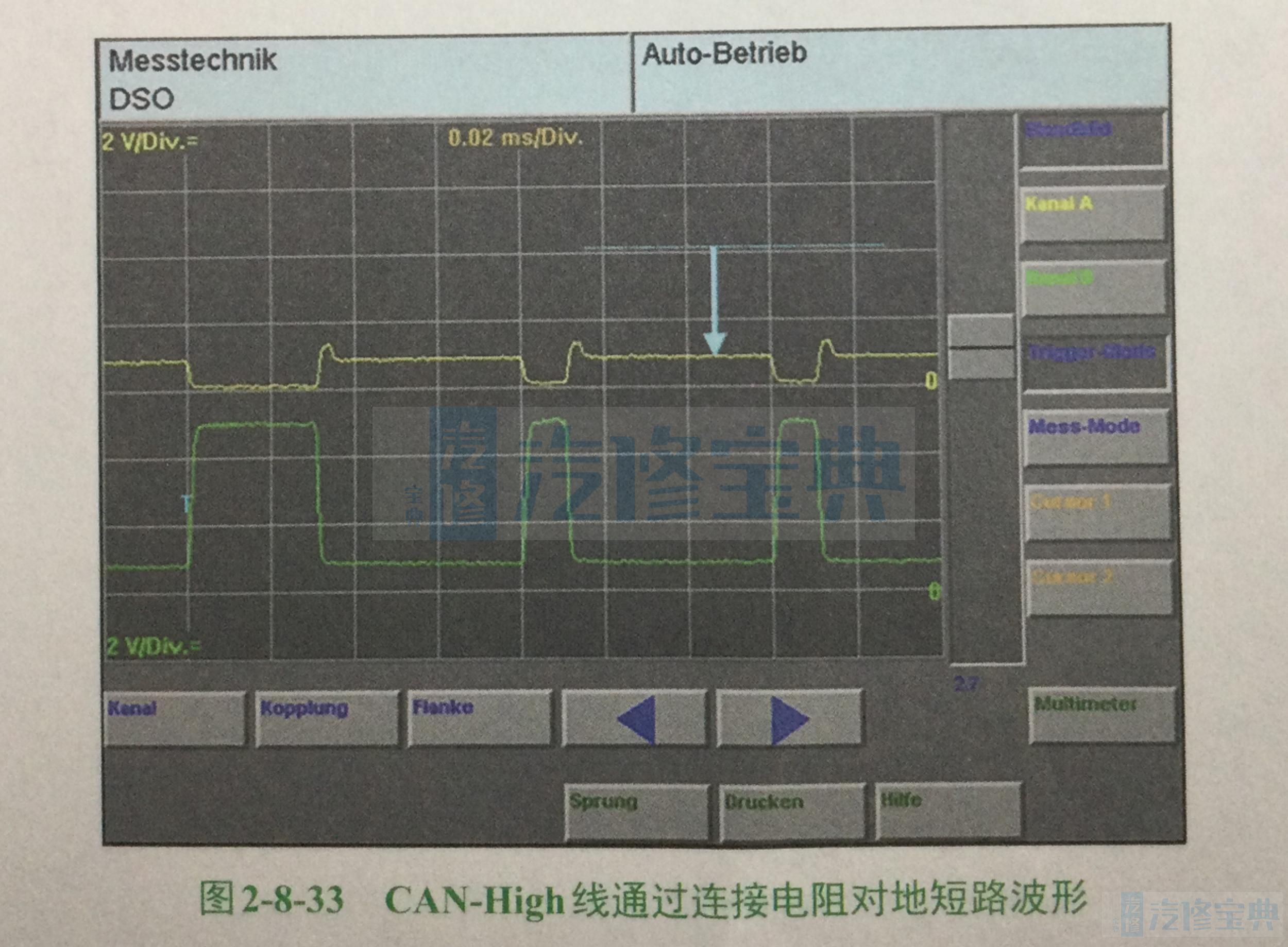
(10)CAN-High线通过连接电阻对地短路故障:
CAN-High线的显性电位移向接地方向。在示波器上可以看出来, CAN-High线的显性电压大约为1V,正常应为大约4V。1V的电压受连接电阻所影响,电阻越小,则显性电压越小。在没有连接电阻的情况下短路,则该电压为0V(图2-8-33)。
(11)CAN-Low线通过连接电阻对正极短路故障:
CAN-LOW线的隐性电压电位拉向正极方向。在示波器上可以看出, CAN-LoW线的隐性电压电位大约为13V,正常应为大约5V。该13V电压是由于连接电阻引起的。电阻越小则隐性电压电位越大。在没有连接电阻的情况下,该电压值为蓄电池电压(图2-8-34)。
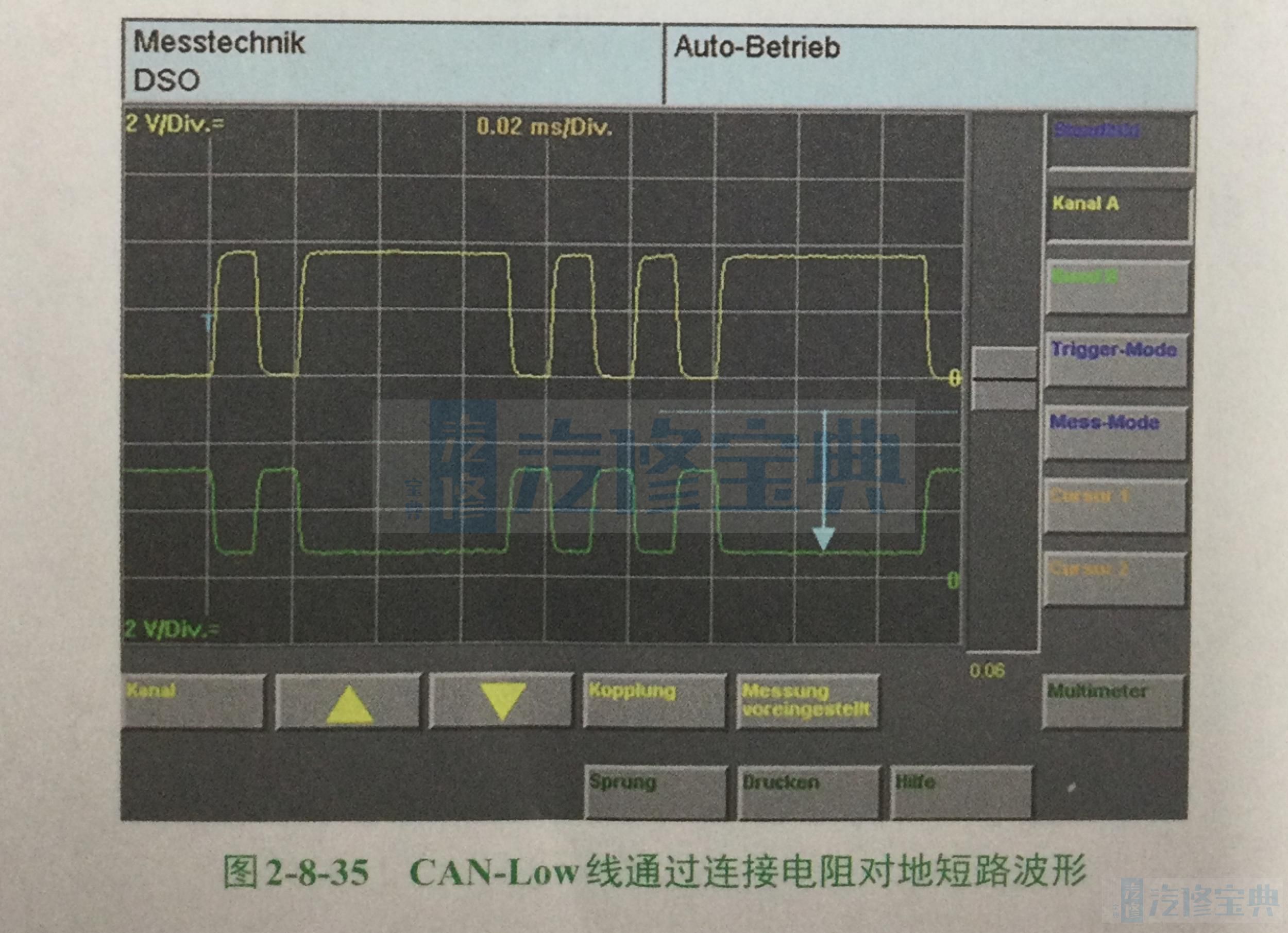
(12) CAN-LOW线通过连接电阻对地短路故障:
CAN-Low线的隐性电压电位拉向0V方向。在波形图上可以看出, CAN-LOW线的隐性电压电位大约为3V,正常应为大约5V。该3V电压是由于连接电阻引起的。电阻越小则隐性电压电位越小。在没有连接电阻的情况下,该电压值为0V(图2-8-35)。
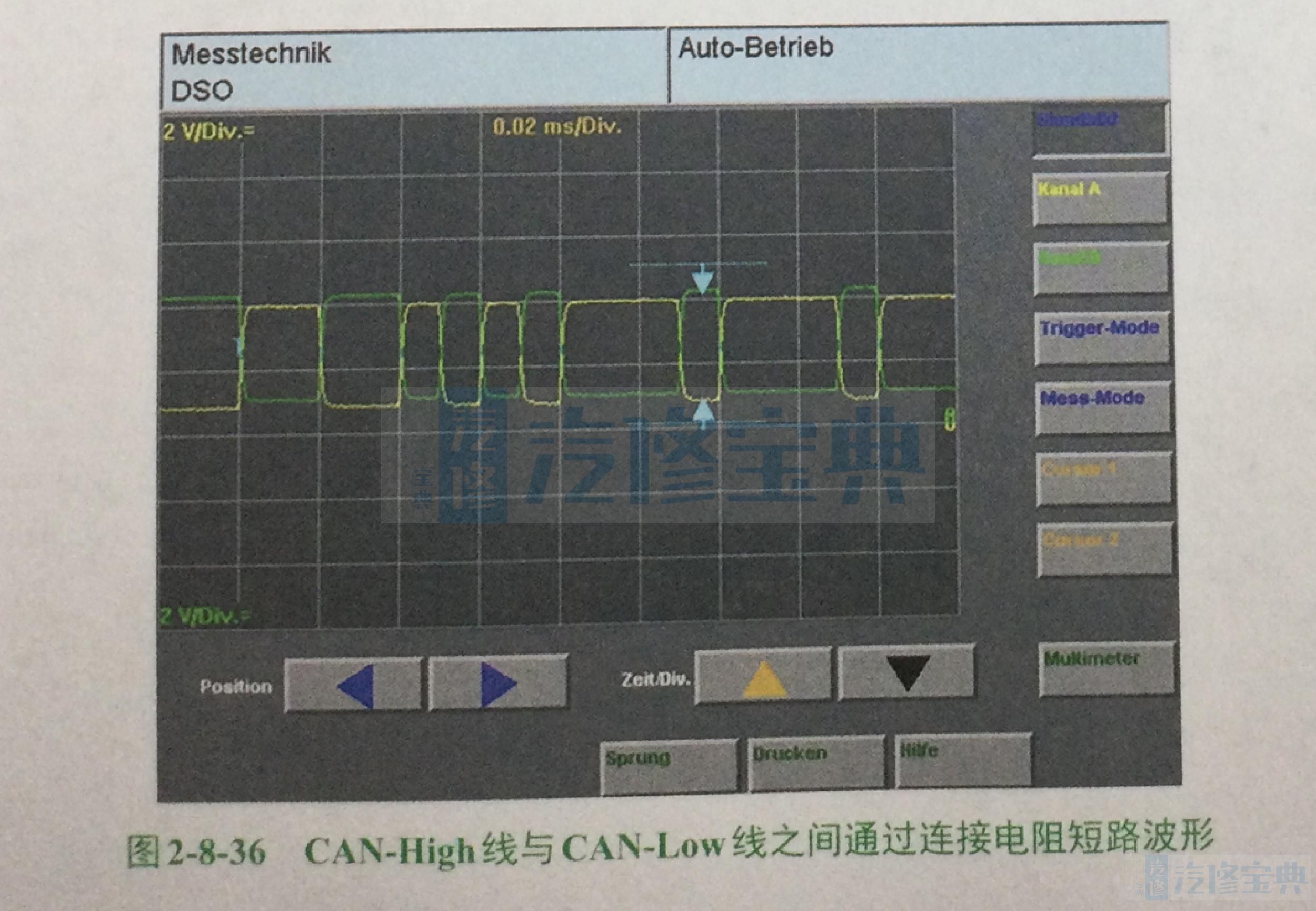
(13)CAN-High线与 CAN-LOW线之间通过连接电阻短路故障:
在短路的情况下, CAN-High线与 CAN-LOW线的隐性电压电位相互靠近。
CAN-High的隐性电压大约为1V,正常值为0V, CAN-LOW线的电压大约为4V。正常值为5V。 CAN-High线与 CAN-LOW线的显性电压电位为正常(图2-8-36)。