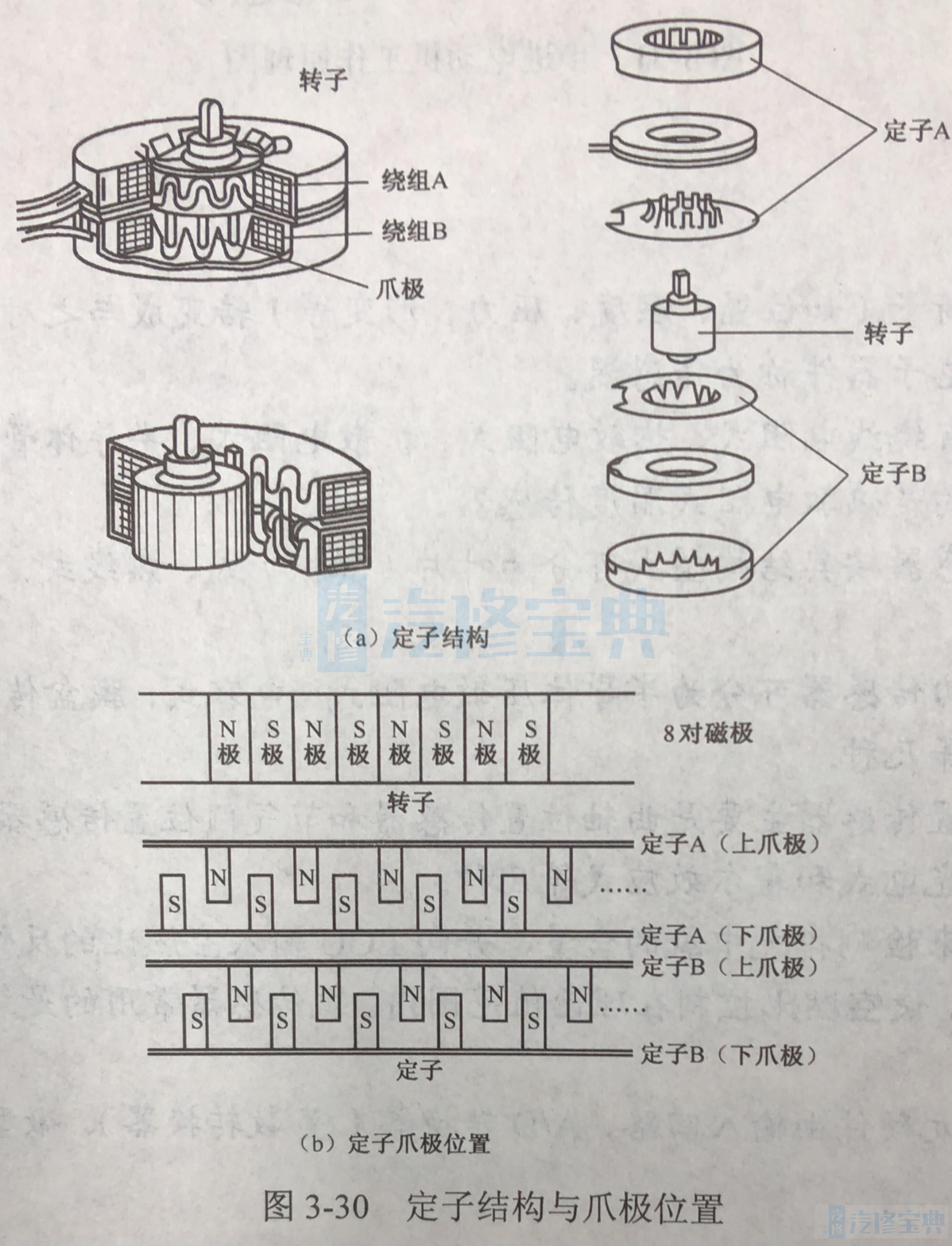
步进电动机的转子用永久磁铁制成,N极和S极在圆周上相对排列,形成8对磁极。定子有A、B两个,上下叠置,内绕A、B两组线圈。每个定子各有8对爪极,每对爪极之间的间距为1个爪极宽度,A、B两定子爪极相差1个爪极宽度,构成一体安装在外壳上,如图3-30所示。
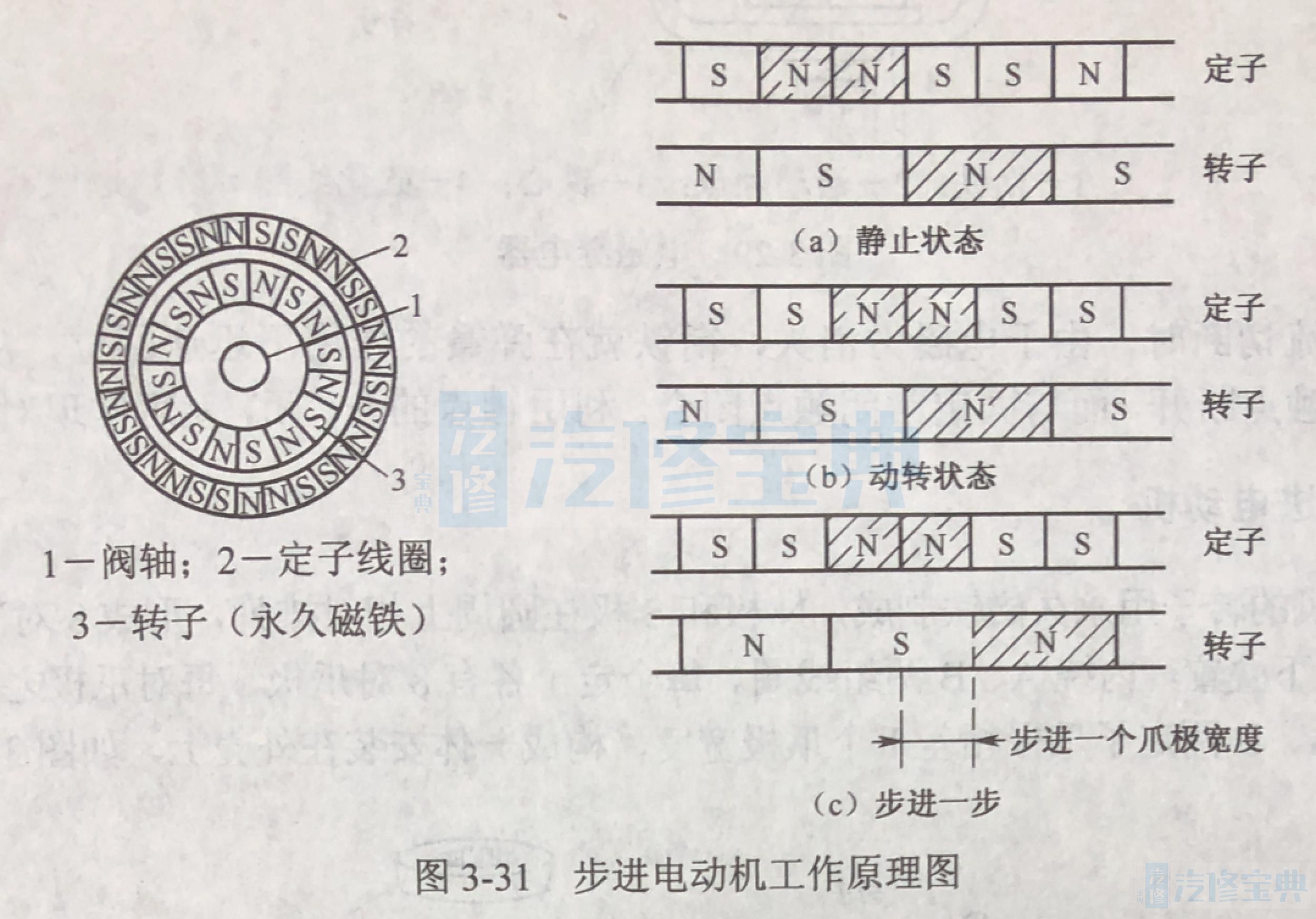
定子爪极的极性是可以变换的,由ECU内三极管控制各相定子绕组的电压脉冲决定。步进电动机的工作原理如图3-31所示。当定子与转子的异性磁极对正时,转子呈静止状态,如图3-31(a)所示。通过对定子各绕组电压脉冲的控制,使其爪极的极性发生变化。在同性磁极推斥力和异性磁极引力的作用下,转子产生运转,如图3-31(b)所示。最后转子步进一个爪极宽度在图3-31(c)中相对定子向右移动一个爪极宽度。若将转子移动一个爪极宽度称为移动一步,则对于具有两个定子、共计32个爪极的步进电动机而言,一步为1/30转(约11°)。日本丰田车用步进电动机由怠速位置到最大开度可工作125步,转子转1圈(工作32步)约用0.25s。