概述: Bosch和 Intel公司为信息传输(特别是车辆中的信息传输)开发了“控制器区域网络”(CAN)。20世纪90年代初,这种总线技术首次在高级量产汽车中用作发动机和变速器控制系统与仪表板之间的高速网络。CAN不断拓展应用,在2001年已经在第一批低价中级车中安装。CAN总线传输示意图如图1-17所示。
CAN已针对车辆中的数据交换统一了标准。借助这些全世界有效的标准,任意制造商的控制模块都可相互交换数据。
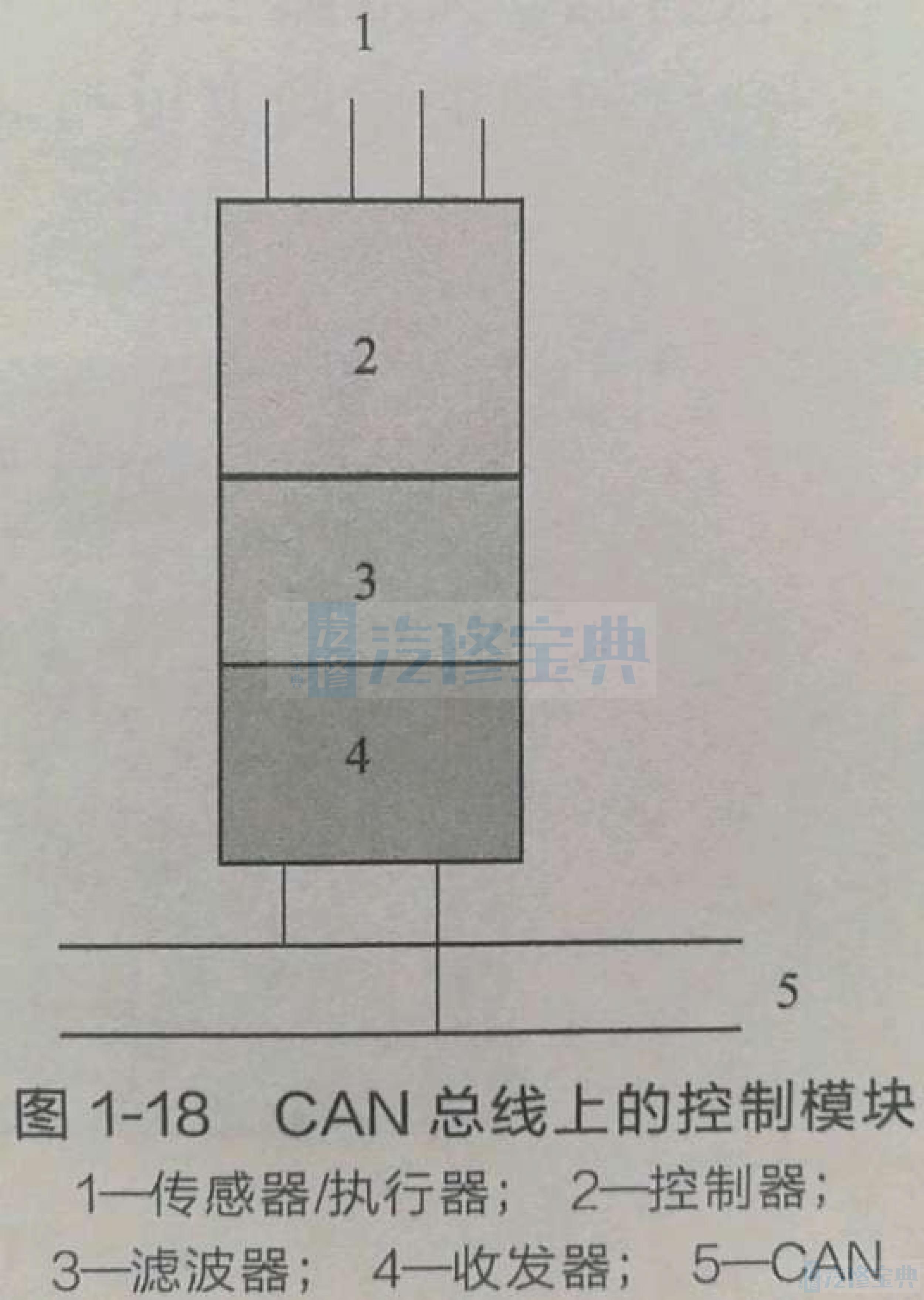
可在CAN总线上连接控制模块,这些控制模块具有高度复杂的微电子装置,并且每个控制模块都像一部微型计算机。CAN总线上的控制模块如图1-18所示。
控制模块的基本结构由三部分组成—收发器、滤波器和控制器。控制模块通过收发器(发射器、接收器)连接在CAN上。收发器使控制模块能够通过CAN发射和接收信息。滤波器检查接收的信息,并检查接收的信息是否规定用于控制模块,并只把规定用于控制模块的信息转发至控制器。控制器是控制模块的核心件。控制器根据接收的信息推导出要执行的活动,并转发至连接的执行器。控制器把从传感器接收到的信号转换成信息,并把这些信息通过收发器和CAN发送到其他控制模块。
车辆中的每个控制模块都是一部由电子部件(硬件)和程序(软件)构成的微型计算机。一部这样的微型计算L的优点是,通过改变程序可以更改控制模块的性能,而不必更改控制模块的硬件。这可与台PC机相比较,通过装载相应的程序,PC机可完成各种各样的任务(文本处理、游戏、播放音乐和视频、备件目录),而不必为此更改计算机的结构。新程序可通过诊断仪进行安装,它把程序通过CAN传递到控制模块(快擦写)。