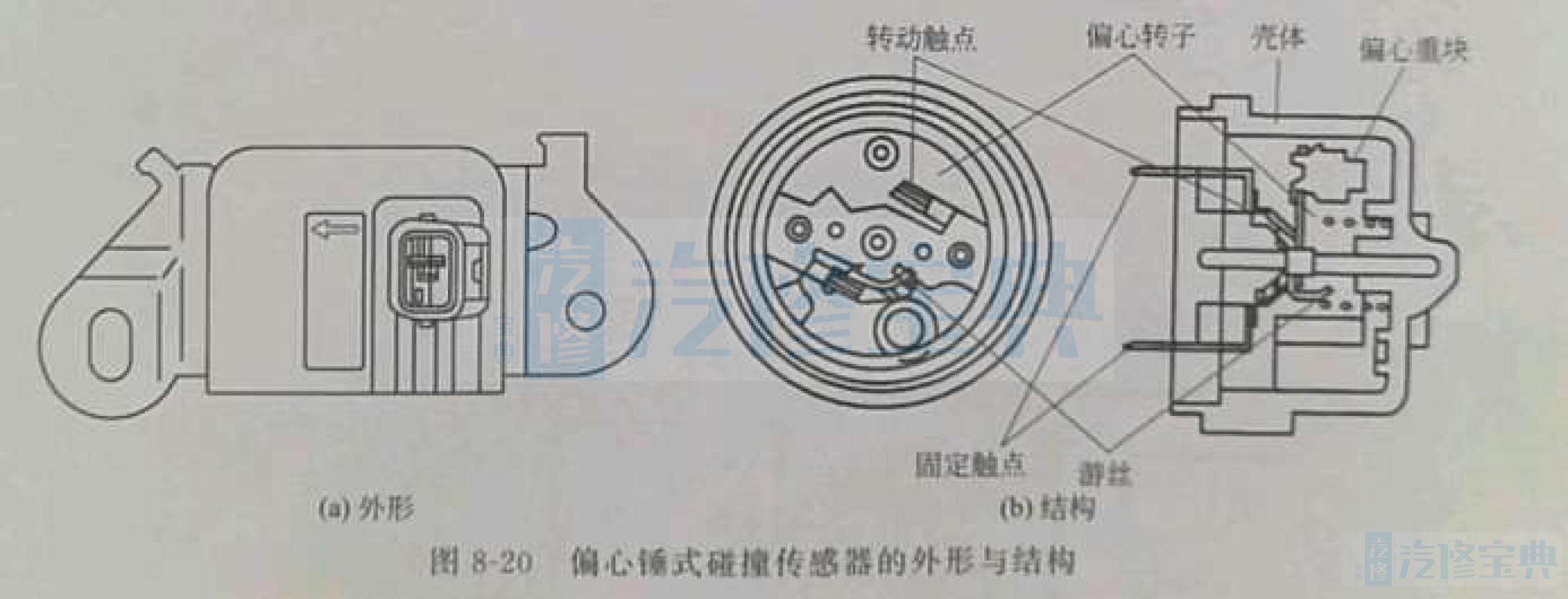
偏心锤式碰撞传感器又称为偏心转子式碰撞传感器,属于惯性开关式碰撞传感器。如图8-20所示,偏心锤式碰撞传感器主要由壳体、偏心转子、偏心重块、固定触点、转动触点等部分组成。
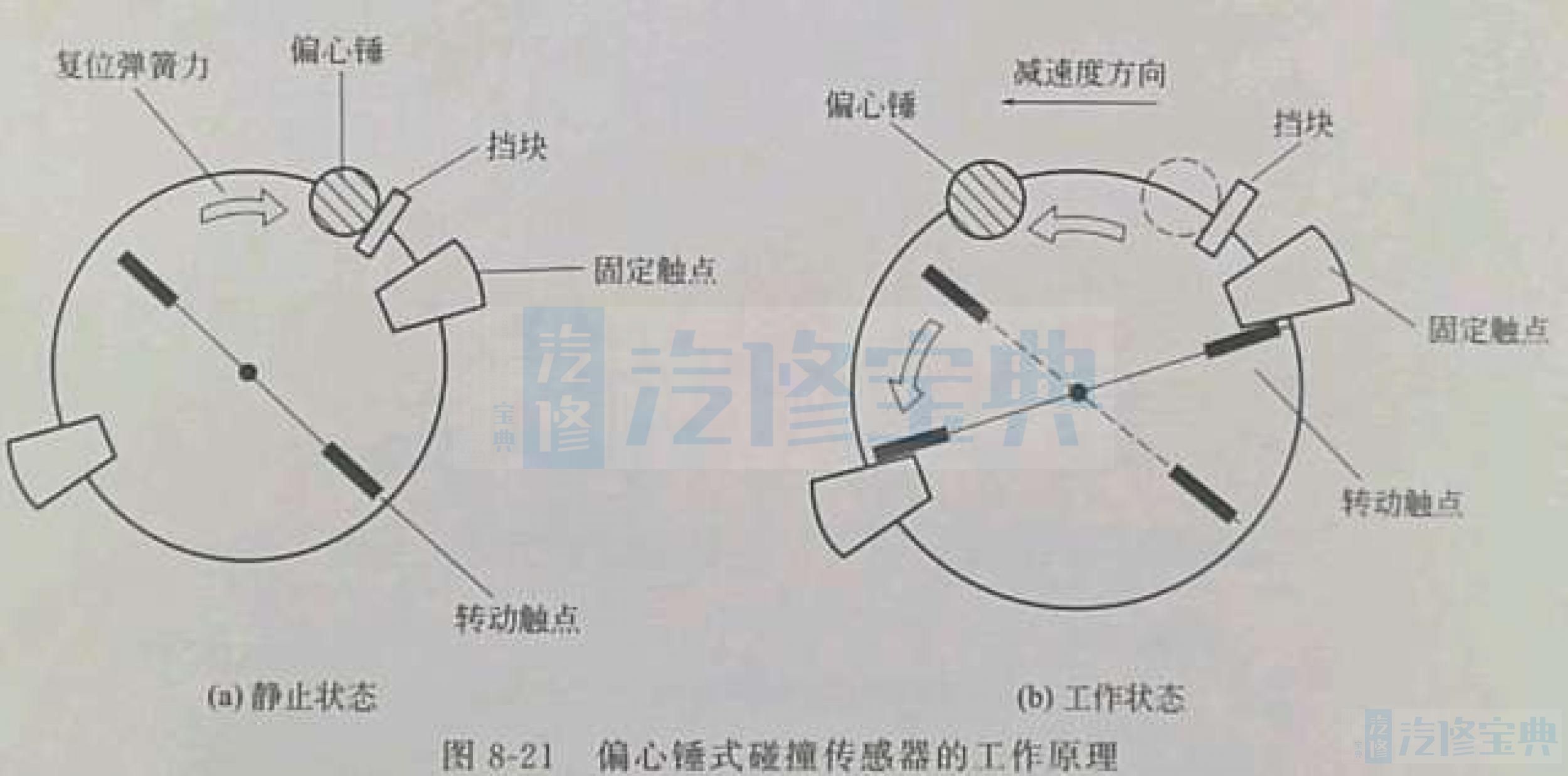
转子总成由偏心锤(或偏心重块)、转动触点臂及转动触点组成,安装在传感器轴上转动臂两端固定有转动触点,转动触点随触点臂一起转动。两个固定触点绝缘固定在传感器壳体上,并用导线分别与传感器接线端子连接2.偏心锤式碰撞传感器的工作原理偏心锤式碰撞传感器的工作原理如图8-21所示。
在汽车未碰撞时,传感器处于静止状态,偏心锤和偏心锤臂在螺旋复位弹簧弹力的作用下顶靠在与外壳相连的挡块上,偏心锤与挡块保持接触,此时转子总成处于静止状态,转动触点与固定触点处于断开状态,开关置于“OFF”位置,如图8-21(a)所示,此时安全气囊电路不工作。
当汽车遭受碰撞时,且当偏心锤的惯性力矩大于螺旋复位弹簧弹力作用时,惯性力矩就会克服弹簧力矩使转子总成转动,从而带动转动触点臂转动,如图8-21(b)所示。当碰撞强度达到设定值时,转子总成将转动到转动触点与固定触点接触闭合的位置,此时碰撞传感器接通SRS的搭铁回路,向ECU输入一个“ON”信号,安全气囊电路开始工作,进而引爆充气元件向气囊充气。