执行驻车操作辅助系统PMA功能需要满足的基本前提包括:
①车门必须处于关闭状态②后备厢盖必须处于关闭状态③驾驶员必须系上安全带;
④驻车制动器必须已松开1.测量停车位可在行驶期间测量停车位,为此需要注意向前直线行驶车速不超过约35km/h以及与停车列的最大距离为1.5m等参数。例如如果搜索停车位时在超声波传感器探测范围内探测到路沿,大多数情况下会将其识别为与道路平行的停车位如图5-56所示,搜索与道路垂直的停车位时,路沿大多数情况下不在超声波传感器的探测范围内(探测范围约为4.2m)。驻车操作辅助系统相关参数见表5-4。
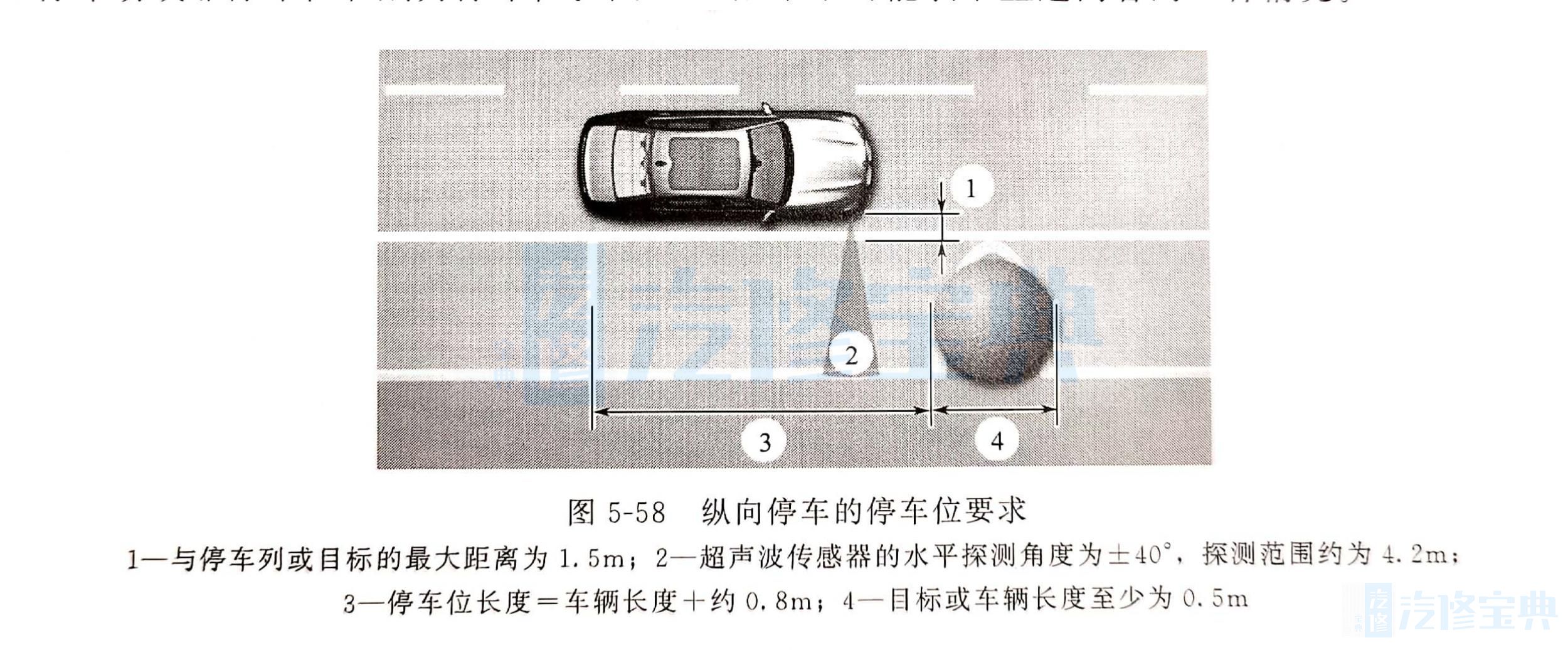
(1)与道路平行的合适停车位(纵向停车)纵向停车原理如图5-57所示,纵向停车的停车位要求见图5-58,车辆探测的目标最小长度必须约为0.5m。
目标长度为0.5m时,PMA传感器还需要通过探测路沿来确定此为纵向停车位,从而停人纵向停车位内(2)与道路垂直的合适停车位(垂直停车)垂直停车原理见图5-59,垂直停车的停车位要求见图5-60。
驾驶员必须自行判断垂直停车位的深度。由于存在技术限制,系统只能大致确定垂直停车位的深度。
2.探测通用型停车位。
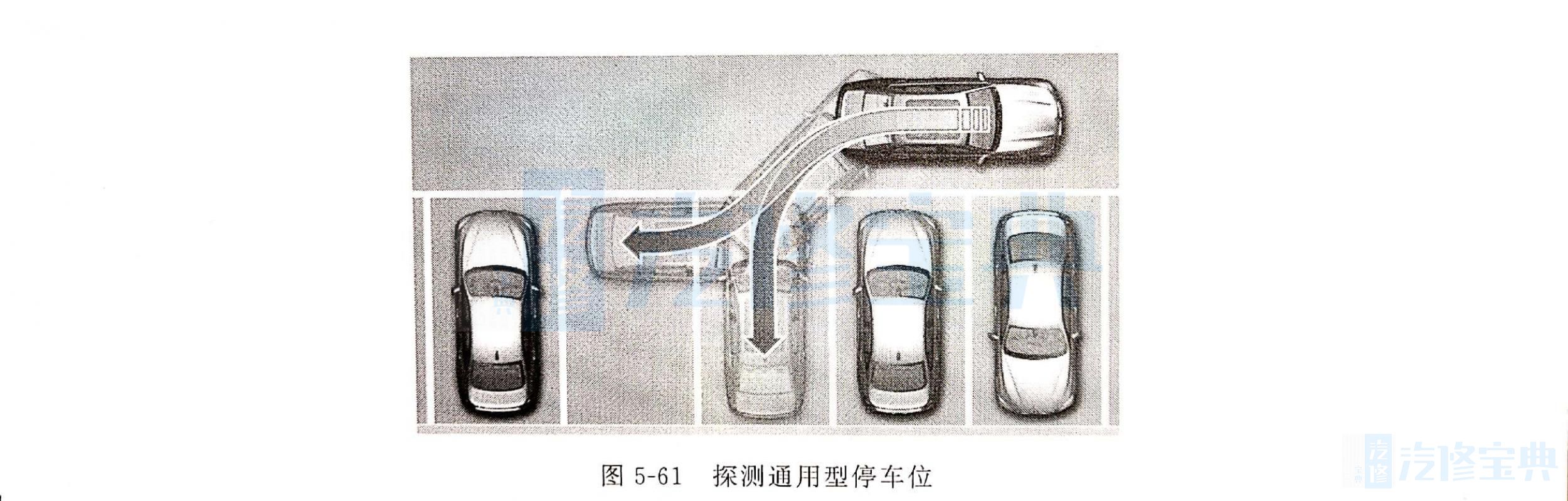
由于存在系统技术限制,车辆无法始终识别出正确停车位,因此可能会错误识别停车位或将不适用的停车场或非停车位识别为停车位。图5-61展示了可能表示上述内容的一种情况。
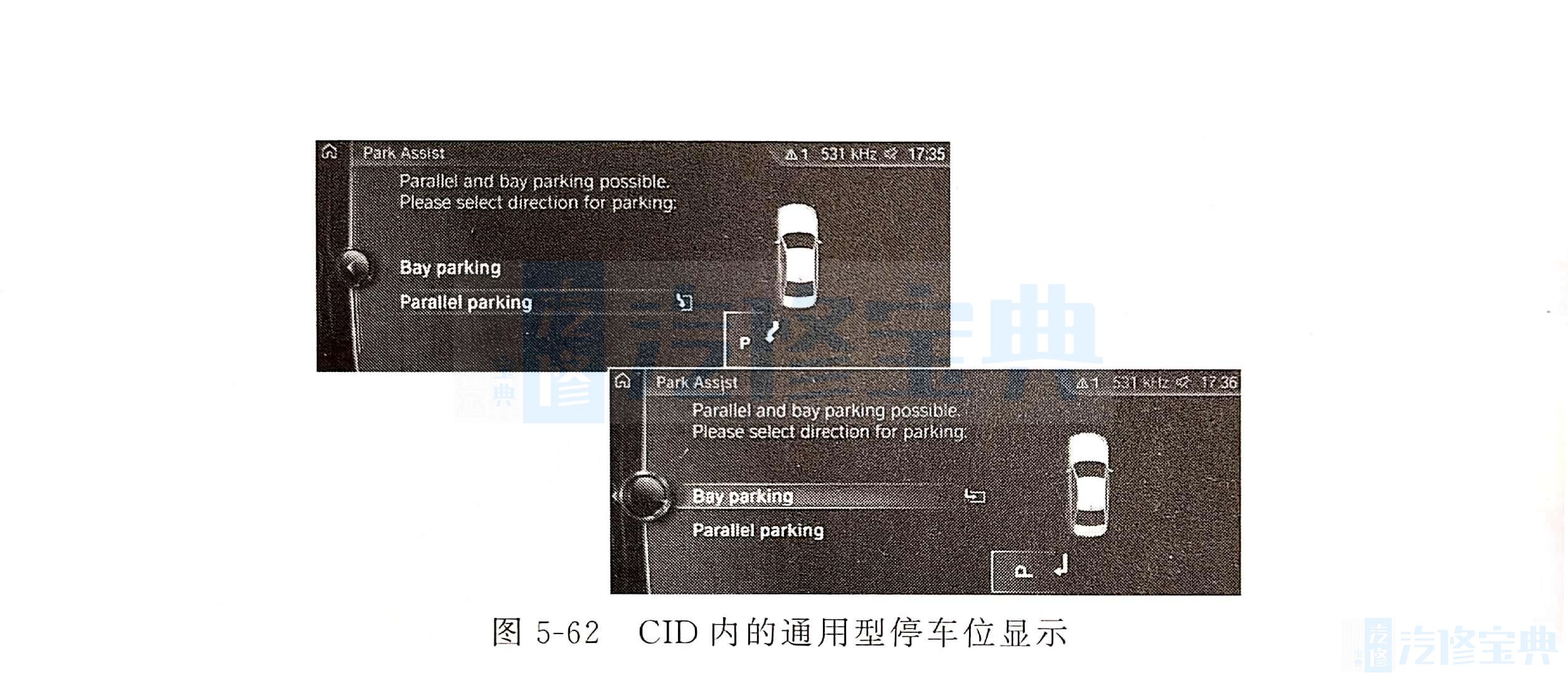
所探测的停车位大小既适合垂直于道路也适合平行于道路停车入位。由于没有路沿,车辆无法准确确定停车位,系统提示存在通用型停车位,在此情况下驾驶员必须自行决定如何停入车位。车辆探测到通用型停车位时,在中央信息显示屏CD内出现的显示见图5-62
3.侧面保护。
如图5-63所示,侧面保护功能提醒车辆侧面有障碍物,从而在驶入和驶出停车位以及掉头时为驾驶员提供支持。通过分别集成在前部和后部保险杠侧面的两个超声波传感器测量与障碍物的距离。车辆自身移动会使传感器所识别的障碍物形成沿车辆侧面的运动轨迹,这会在中央信息显示屏C1D内显示出来(图5-64),在可能发生碰撞的情况下还会发出一个声音警告。
系统不考虑接近静止车辆的障碍物,因为在此情况下系统无法进行正确分析。识别前提是车辆自身移动。在中央信息显示屏CID内显示的距离标记在停车后显示约13s,只有车辆移动后才会重新显示距离标记。