分动器(VTG)控制单元固定在VTG伺服电动机的分动器中。VTG控制单元对VTG伺服电动机进行控制。驱动力矩的分配视各车桥上可支撑的转矩而定。 此电子控制的多片式离合器把驱动力矩无级按需分配到前桥上;始终驱动后桥。因此在脱开的多片式离合器上所有驱动力矩都在后桥上。 在使用四轮驱动的标准驱动模式下,按如下方式分配驱动力矩:40%分配到前桥上60%分配到后桥上。 VTG控制单元和VTG伺服电动机不能单独更换,只能一起更换。 在使用一体式底盘管理系统(ICM)主控制单元中的中央动态行驶调节进行校准时,x Drive之前,动态稳定控制系统(DSC)为四轮调节给出了标准值。标准值取决于车辆的过度转向或不足转向和车轮滑移的趋势。标准值被发送至VTG控制单元。 VTG控制单元根据下列因素调节分动器内多片式离合器的锁定力矩:有关需要的锁定力矩的请求(来自DSC控制单元);齿轮油的状态(在VTG控制单元中计算出);多片式离合器的磨损(在VTG控制单元中计算出);VTG伺服电动机的负荷(在VTG控制单元中计算出);变速器油温(在VTG控制单元中计算出)。 VTG控制单元向DSC控制单元发送下列信息:实际设定的锁定力矩;所有计算出的数据。 需要时将限制锁定力矩,以便降低摩擦。这样可以避免离合器热过载。通过检查控制信息可以报告锁定力矩的范围。 通过此VTG伺服电动机可分离或接合多片式离合器。通过霍尔传感器检测伺服电动机轴的摆动速度和位置。 VTG控制单元中的一个温度传感器监控VTG伺服电动机的功率输出级,这样可以避免伺服电动机热过载。可通过检查控制信息报告伺服电动机热过载,分动器临时进入敞开位置,多片式离合器分离。在伺服电动机冷却后,可以重新操作多片式离合器(条件:动态稳定控制系统必须要求只能为0N·m锁定力矩)。
由于机械部件生产中存在机械公差,因此多片式离合器的锁定力矩特性线会有轻微偏差。通过分级考虑分动器的机械公差,这样可确保最佳功能。
在总线端K1.15断开时进行一次基准运行。在该基准运行过程中,为VTG伺服电动机的一个规定角度位置分配一个相应的多片式离合器锁定力矩。此时还考虑因磨损产生的影响。在该基准运行过程中,多片式离合器被完全接合,然后分离一次。与此同时,在VTG伺服电动机的当时角度位置上测量电流消耗。因此测定多片式离合器关闭过程的开始和结束。角度位置可通过VTG伺服电动机内集成的霍尔传感器检测。该值被存储并用作车辆重新启动时的数据。
在VTG控制单元中集成了一个紧急运行调节器。当DSC控制单元或重要的传感器信
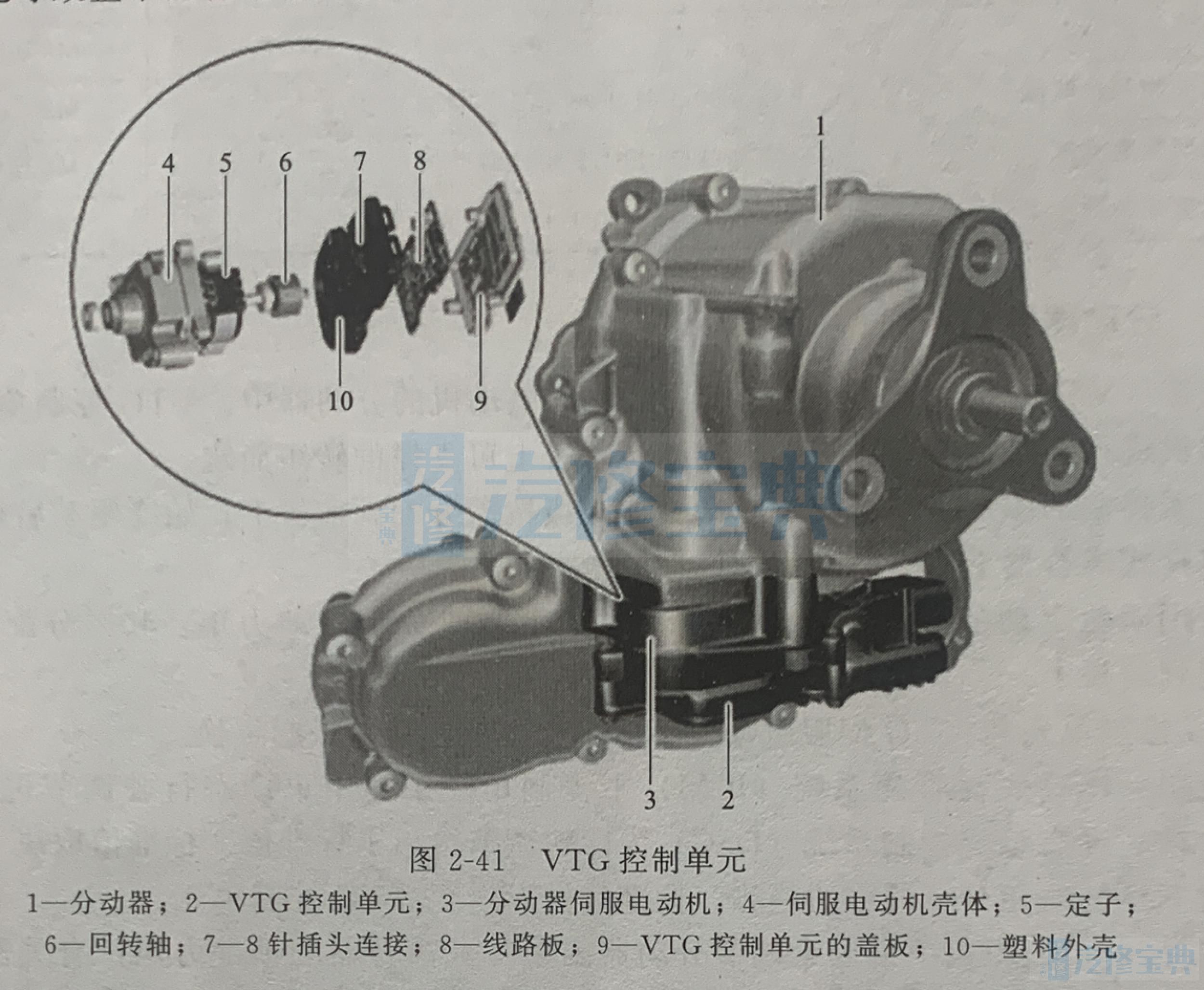
号失灵时,通过该调节器尝试,尽可能长时间地保持四轮驱动正常。当各传感器信号失灵时,将计算替代值,用替代值驱动相应的功能,直到四轮驱动无法继续实现合适的控制为止。这可能导致整个四轮驱动的损失。VTG控制单元如图2-41所示。
伺服电动机壳体用于定位定子和支承转子(使用两个球轴承进行单侧支承)。线路板及其部件位于塑料外壳内。
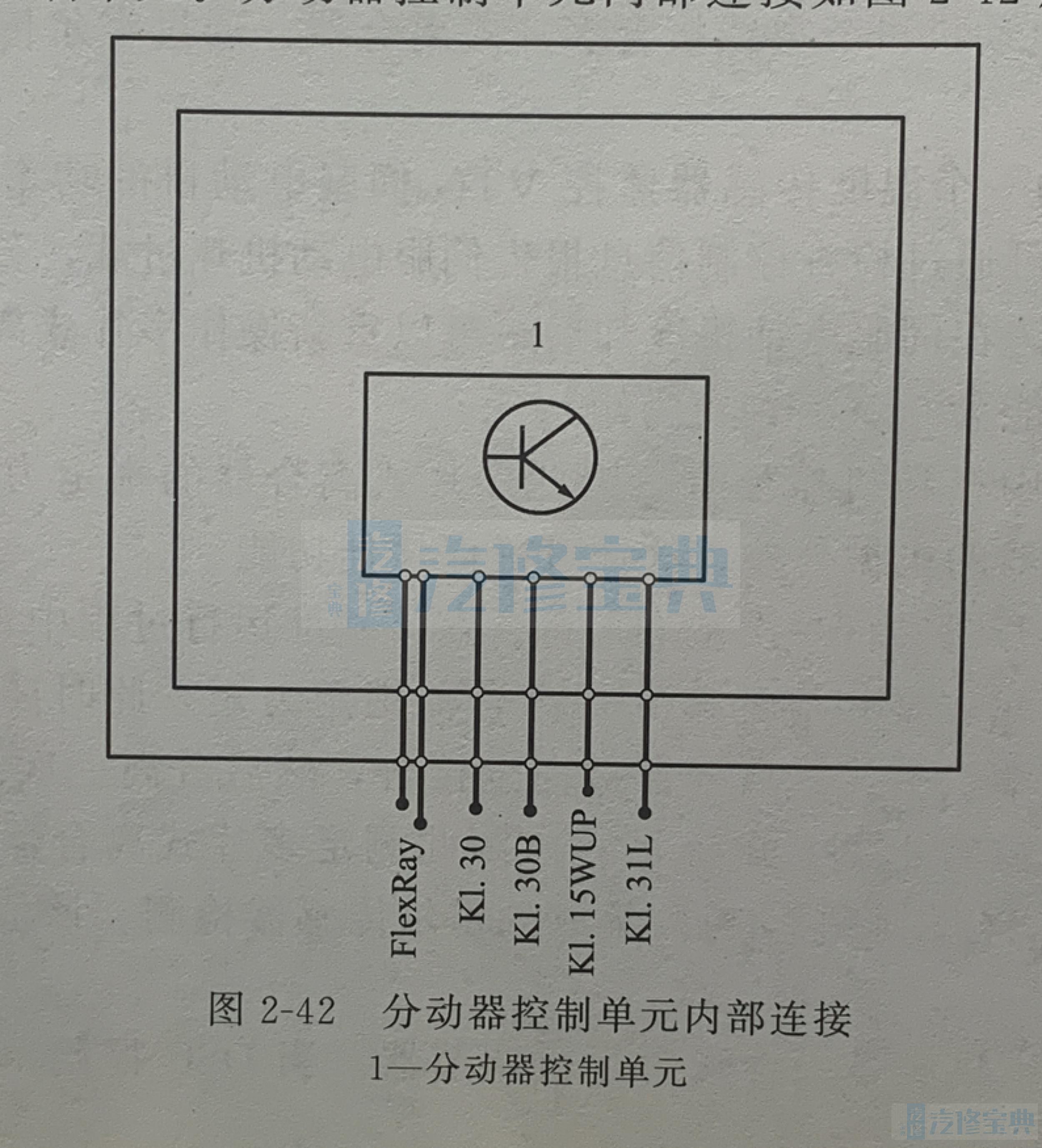
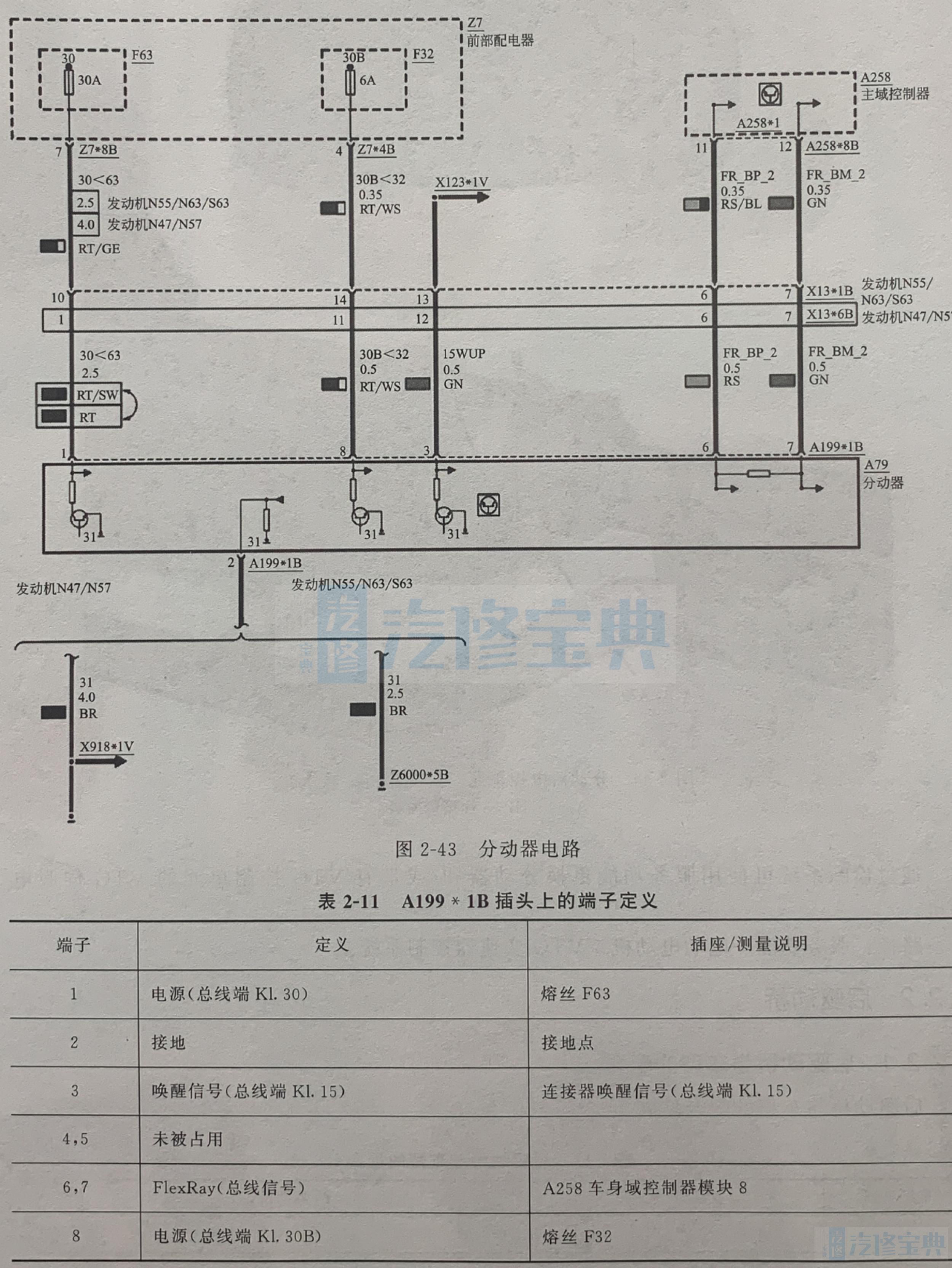
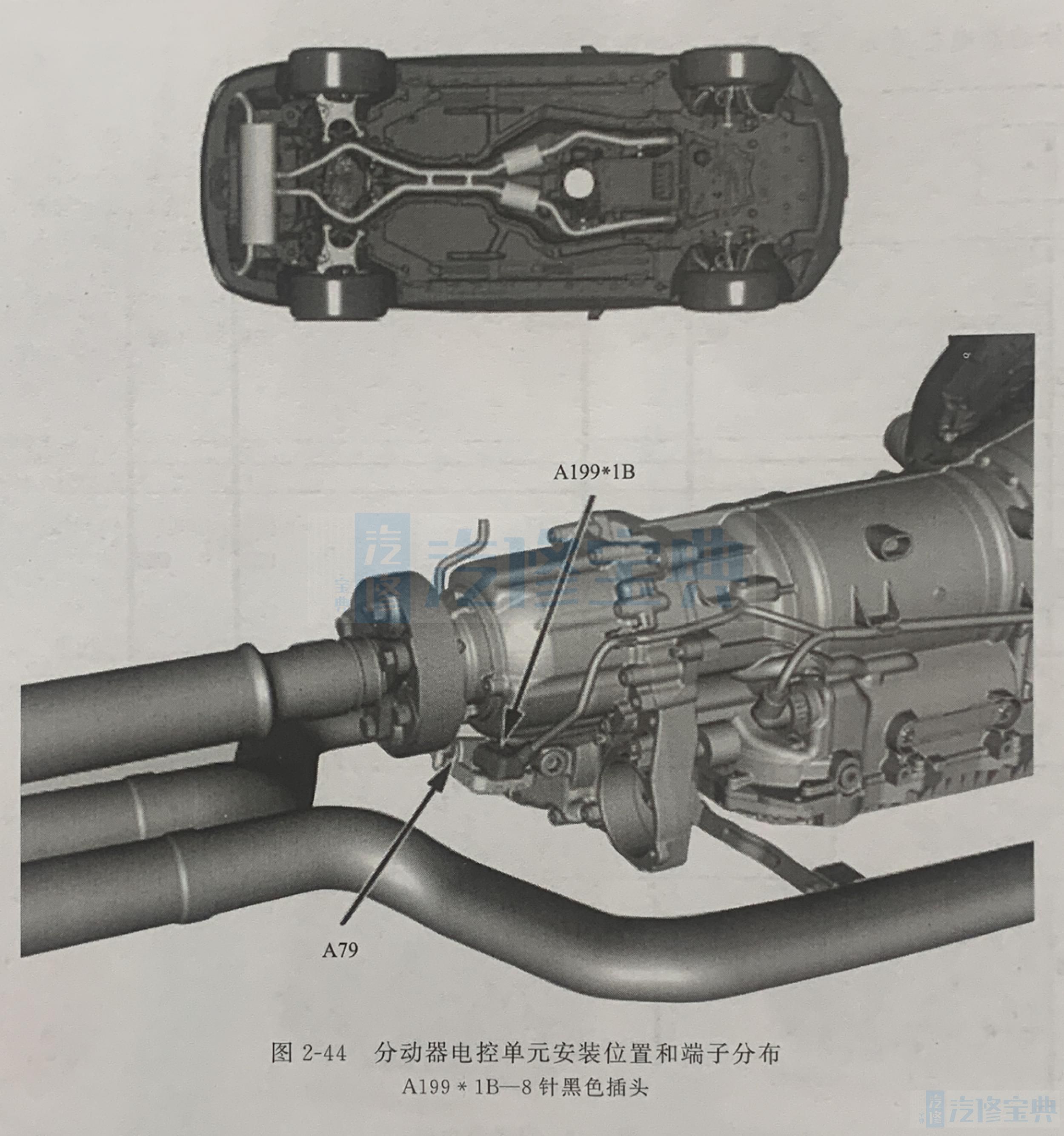
分动器控制单元通过一个8针插头连接在车载网络上。分动器控制单元是 FlexRay上与总线相连的控制单元。后方配电器通过总线端K.30和K1.30B为分动器控制单元供电。便捷进入及启动系统(CAS)或前部车身电子模块(FEM)通过唤醒导线(总线端K1.15唤醒导线)唤醒分动器控制单元。分动器控制单元内部连接如图2-42所示,电路如图2-43所
示,分动器电控单元安装位置端子分布见图2-44,端子定义见表2-11。
与VTG控制单元的通信失灵时,进行标准检测(整体检测过程)。存在某个控制单元内部故障时,预计出现以下情况:VTG控制单元内出现故障记录,组合仪表( KOMBI)中的固定报警灯和指示灯亮起,组合仪表上出现检查控制信息。
通过诊断系统可使用服务功能更换分动器和/或带有VTG控制单元的VTG伺服电动机。
路径:服务功能>电动电动机>VTG变速器控制系统。