动态全轮转向是一个新系统,它首次是用在了奥迪A8(车型4N)上,是选装系统(图3-4-9)。该系统是在首次应用于奥迪Q7(车型4M)上的全轮转向系统基础上进一步开发而来的。其新颖之处是把后轮转向系统与动态转向系统结合在一起,这样的话,司机可独立将后轮和前轮转向一定的角度,这就大大改善了车辆主观和客观方面的行驶动力学性能,比如: ①转弯半径更小; ②转向更省力; ③明显改善了灵活性(尤其在低车速和中等车速时); ④改善了行驶稳定性(尤其在变换车道和规避时); ⑤改善了响应特性,车辆反应时间降低。 这个动态转向系统的硬件和结构,与奥迪A4(车型8W)上使用的第2代动态转向系统是相同的。主动转向控制单元J792通过 FlexRay总线的通道A来进行通信。 后轮转向系统的硬件和结构与奥迪Q7(车型4M)上的后轮转向系统基本相同。与奥迪Q7(车型4M)上的后轮转向系统相比,执行装置的安装位置扭转了,尺寸也小了一些(图3-4-10)。后轮转向控制单元J1019也是通过 FlexRay总线的通道A来进行通信。
在装备有普通转向系统的车上,后桥转向单元如图3-4-11所示。一般而言,较小的转向传动比再加上较小的司机施加的转向力,可以让司机获得一个非常直接的“转向感”。司机在改变行驶方向时能明显清楚地感觉到转向运动,车辆表现为具有运动性和灵活性。
就行驶稳定性方面来讲,无动态全轮转向系统的车辆反应非常直接,在某些行驶情形时表现得“很灵敏”。比如:在车辆高速直行时,方向盘上的很小转动,就可能引起车辆明显失稳。
轴距对行驶稳定性的影响也非常大。轴距较大的车辆,行驶稳定性更好;轴距较小的车辆,则反应灵敏甚至不稳定。
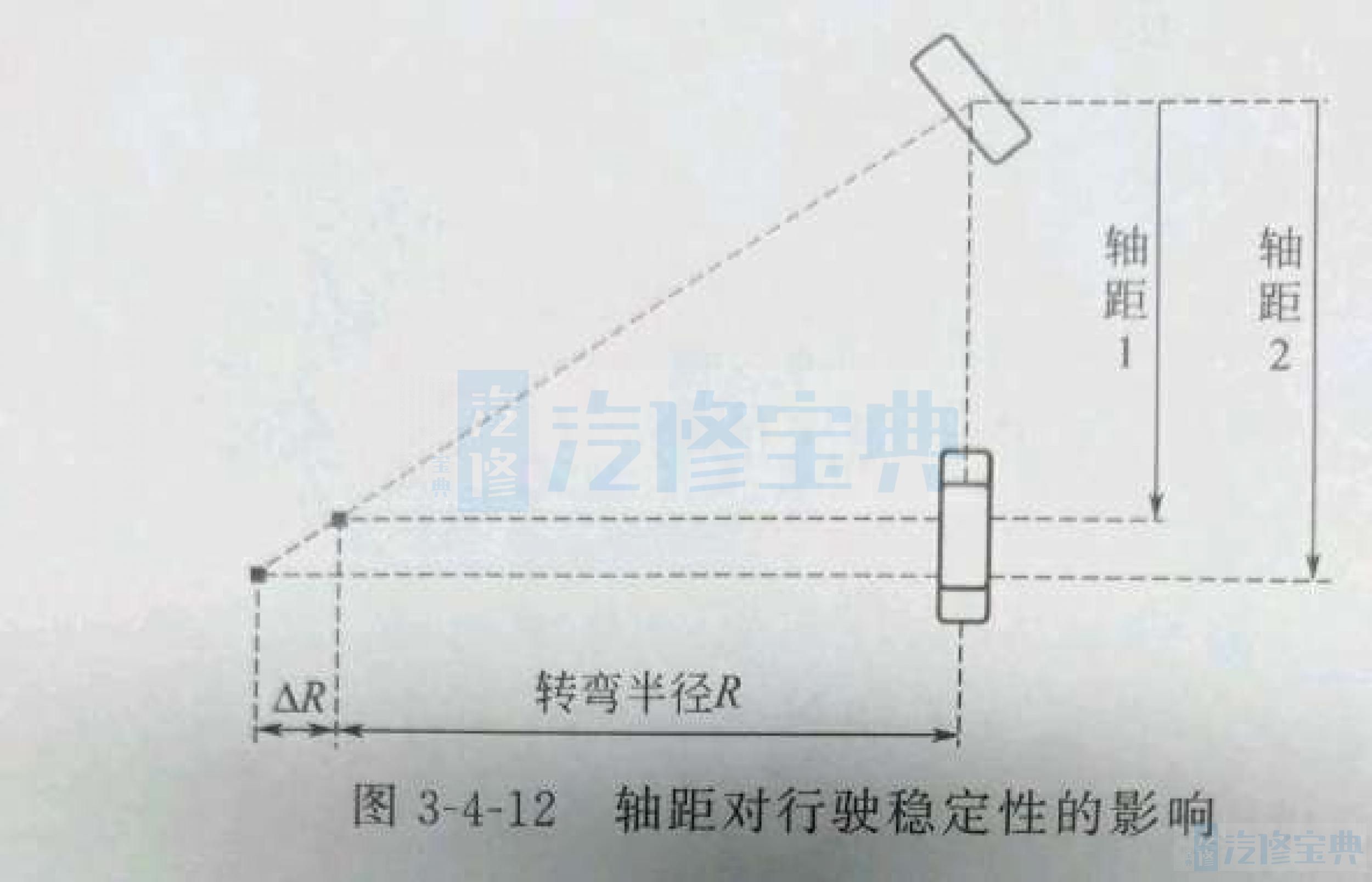
转向传动比/直接性和轴距是转向系统设计中要考虑的两个标准,它们是相互作用的(图3-4-12)。如果把直接转向传动比与短轴距结合在一起,那么车辆将会是转向非常灵敏乃至不稳的。在驶入和驶出停车位时以及以低速行驶在多弯道的路段时,车辆灵活是个优点;但在车辆高速行驶时,车辆会马上变得不稳定了,一般的司机会很难或者根本无法控制车辆。
在需要时通过动态全轮转向系统可以平衡直接转向传动比与行驶稳定性之间的冲突了。
在图3-4-12中,转弯半径保持不变,就是说车辆的直接性保持不变。通过虚拟增大轴距,明显提高了行驶稳定性。
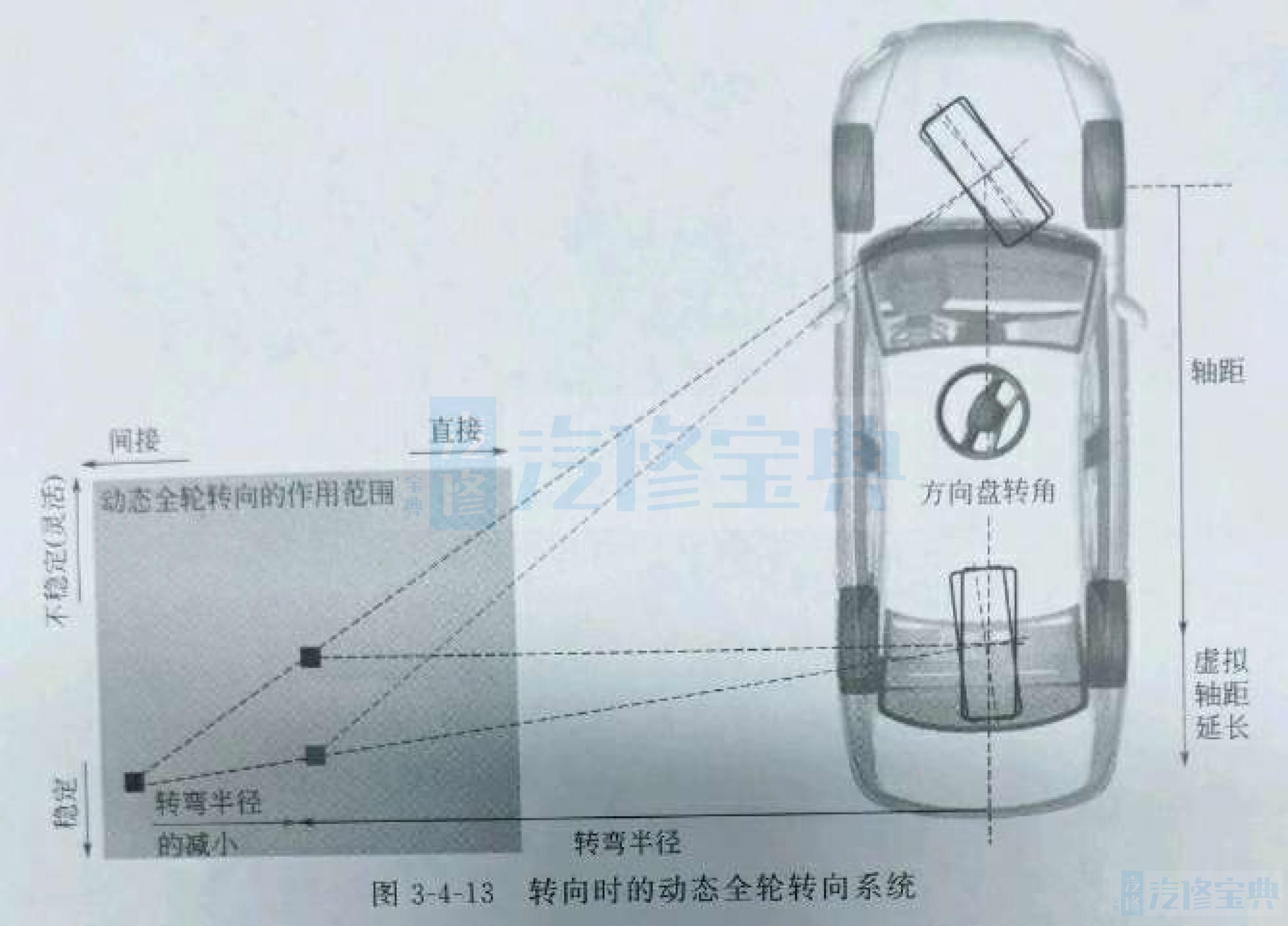
图3-4-13展示的就是这种关系的示例。车轮轮廓是传统转向过程的,通过动态转向在前轮上实现了一个更大的转向角(比司机输入的要大),与此同时,后轮也朝同一方向转动。
所谓动态全轮转向系统,就是在基本转向系统(电动机械式转向系统EPS)中增加了动态转向系统和后轮转向系统(图3-4-14)。前轮和后轮所需要的转向角都由底盘控制单元J775(图3-4-15)进行中央控制。
把规定转向角转换成前轮和后轮执行装置所要求的电流值,这个工作是由转向助力控制单元J500、后轮转向控制单元J019以及动态转向(主动转向)控制单元J792分别完成的。
这些控制单元都是通过 FlexRay通道A来传递数据的。在奥迪A8(车型4N)上,动态转向系统和后轮转向系统不是单独提供的,只能作为动态全轮转向包的一部分来提供。
底盘控制单元内包含有调节软件。规定转向角值的确定,主要是基于下面这些内容:相的行驶状态(车辆动力学状况)、司机的操作以及“ Audi Drive select”中所选的驾驶程序。另外,还会考虑到相应的驾驶员辅助系统是否正在工作中(图3-4-15)。
通过分析下面这些重要参数来获知车辆动力学状况。
①车速。底盘控制单元根据车轮转速来计算出当前车速。
②方向盘转角/计算出的转向角。通过分析转向角传感器G85的测量数据或者通过电动机械式转向机构的计算而得出。
③横向加速度和横摆率。由安全气囊控制单元内的传感器测得并经 FlexRay总线传给底盘控制单元。
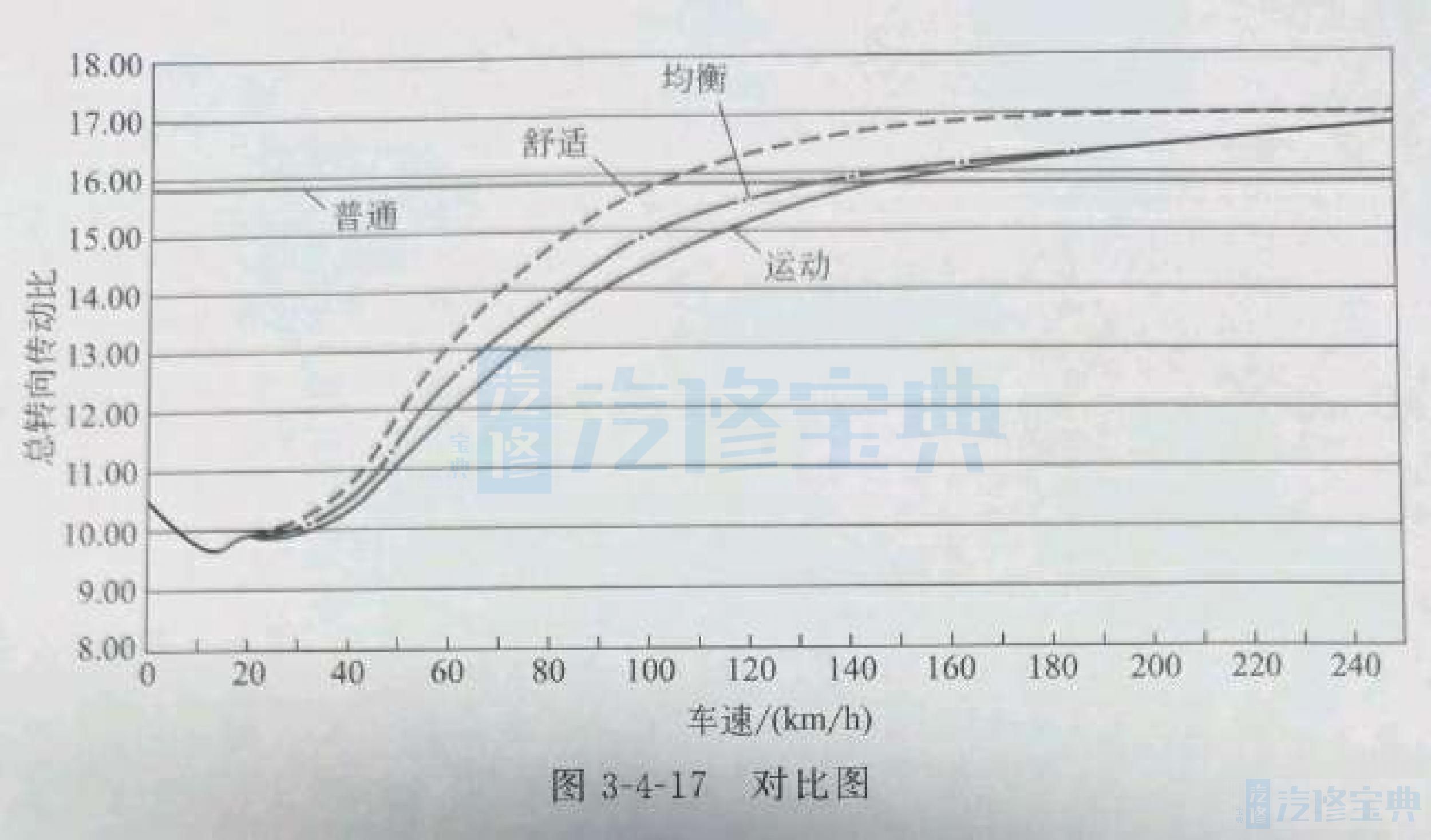
④发动机扭矩。内燃机实时转矩由发动机控制单元通过 FlexRay总线来传送。司机所施加的转向运动和司机对油门踏板的操纵也是调节的重要输入量。通过选择行驶程序(运动、均衡、舒适),可以改变动态全轮转向的调节特性。在带挂车运行时(由挂车识别控制单元J345来识别),不允许使用动态模式。
在调节开始时,底盘控制单元J775先判断方向盘是否处在倾斜状态,也就是在车辆直行时,转向角传感器的偏离量有多大。这个偏离量会在随后的所有转向角测量值中予以考虑,但并不用于校正方向盘位置。调节的一个主要任务,就是在前轮和后轮上同步转向角,这就保证了前轮和后轮对转向做出同步响应。后轮最大转向角可达5°。
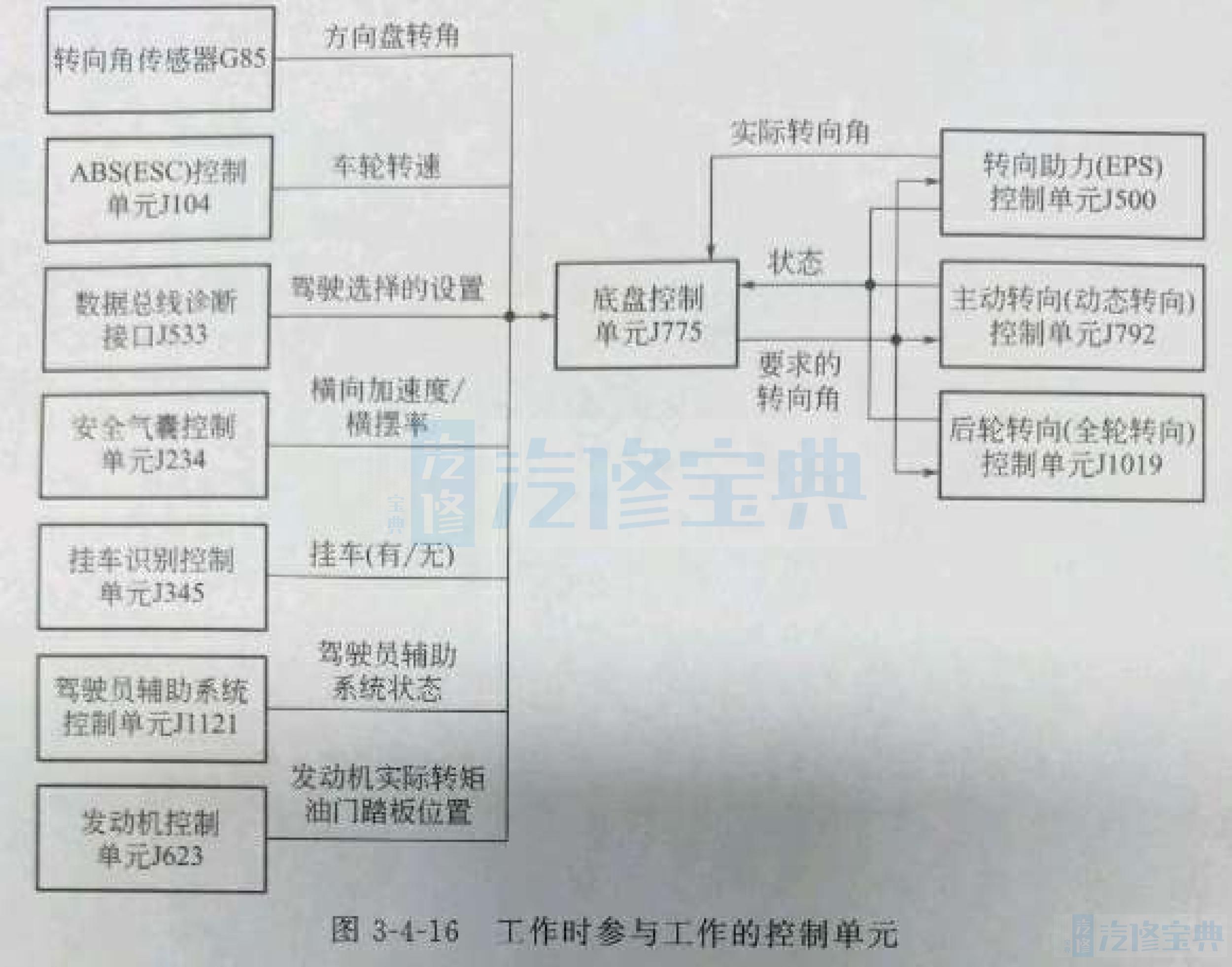
图3-4-16列出了重要的输入和输出信息以及底盘控制单元实施调节时所涉及的控制单元。底盘控制单元内包含有各系统的调节软件,这些系统之间内部也相互交换信息。因此,动态全轮转向的调节软件也接收来自自适应空气悬架的车辆高度信息。
接通点火开关(端子15接通)时,就会进行例行的可靠性检测。
在发动机启动后且车处于静止状态时,如果司机转动方向盘,那么后轮会反向转动,最大可达0.5°。如果车辆开始行进,那么就会计算后轮转向角(会考虑到虚拟路缘)。后轮的转角只能转到不撞击到路缘的程度。
在车辆行驶过程中,计算后轮转角以及设置前轮转向传动比还要考虑到车速。具体计算由底盘控制单元基于一个复杂的计算模型来完成,要考虑到路面摩擦系数、轮胎特性和动态转向以及后轮转向的调节能力。
比如:若需要的话,后轮的转向角会减小,以避免后轮转向造成的超过后轮的最大摩擦系数的情况发生。动态转向系统和后轮转向系、持续不断地将其负荷信息传给底盘控制单元,因此调节软件就能够只将能执行的转向角调节要求发送给前轮和后轮。规定的转向角既可由底盘控制单元来监控,也可由动态转向和后轮转向控制单元来监控。在车辆静止且点火开关关闭(端子15关闭)时,后轮会转至中间位置且保持在这个位置上(图3-4-17)。
1.特殊行驶状态时的功能。
在特殊行驶状态时,还会激活专为此而开发的功能,比如在转向不足和过度转向的情况就是这样的。如果司机在过度转向时实施反向转向动作,那么根据车速范围会把后轮转至中间位置并保持在这个位置上,直至过度转向结束。同样,在转向不足时,后轮转向角也会发生相应变化,以便将车辆保持在车道上。
在到达行驶动力学极限范围时,后轮转向角就受限了。在左、右车轮处于摩擦系数不同的路面时(比如右侧车轮在干路面上,左侧车轮在湿路面上),若实施制动,那么就会有稳定的转向介入,这会明显降低车辆误转向或者偏向一边。
前轮和后轮上确定下来的转向角由动态转向和后轮转向经 FlexRay数据总线传给ESC。ESC在随后的调节中会考虑到这些信息。
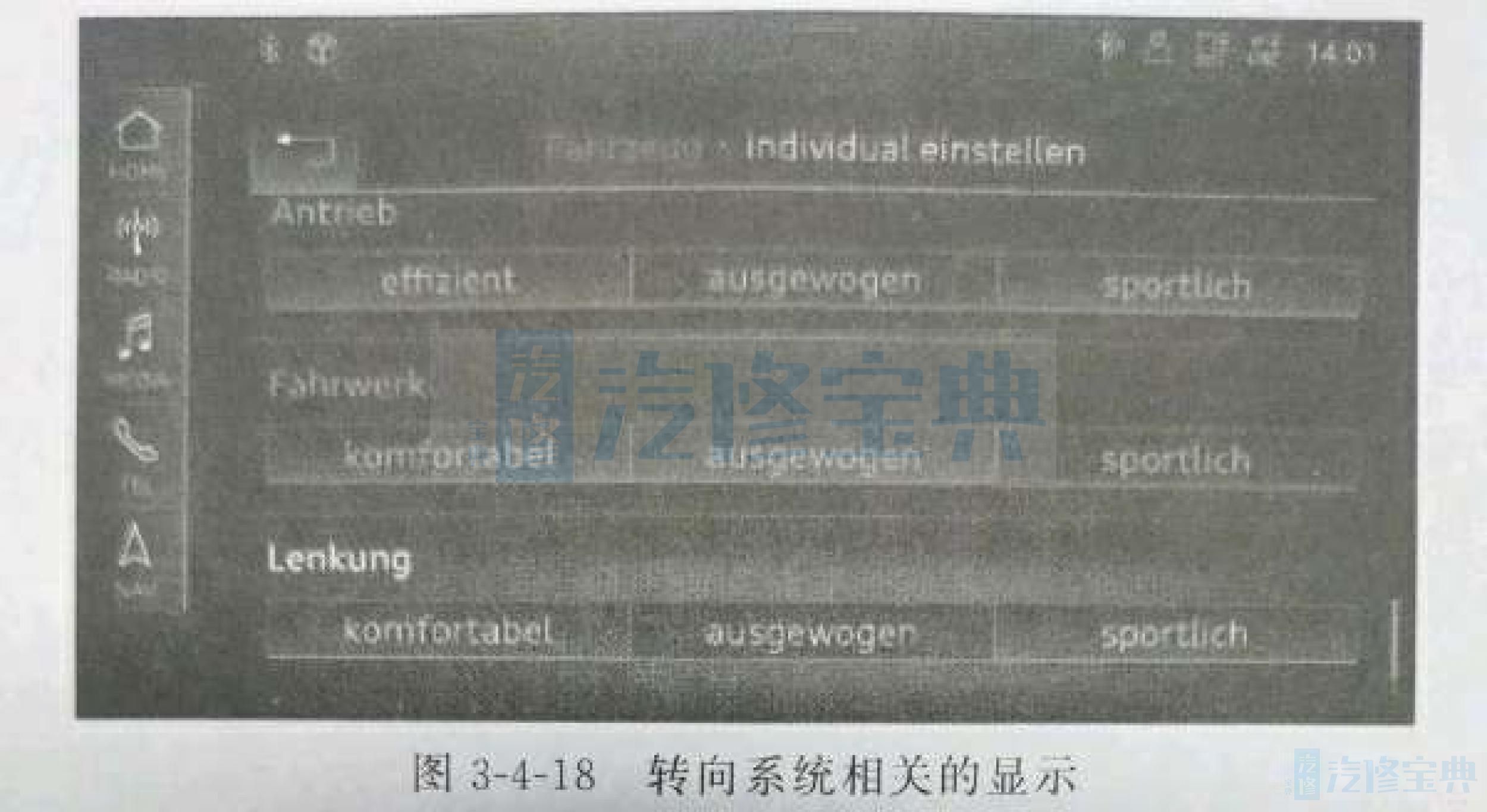
2.操纵和显示(图3-4-18)。
驾驶员可以使用“ Audi drive select”来调节转向系统的特性。具体来说,有三种不同的转向特性曲线可供使用(舒适、均衡、运动)。如果激活了 efficiency(高效)模式,激活的就是“舒适”这个转向特性曲线。如果选择了 individual(个性化)这个模式,那么可按需要来选择这三种特性曲线的任一种。与转向系统相关的显示,只有在有故障时才会出现。
3.故障时的系统特性。
参与动态全轮转向的系统和部件都有自诊断功能。底盘控制单元总在不断地接收到有关EPS、动态转向和后轮转向可用性或者状态信息。
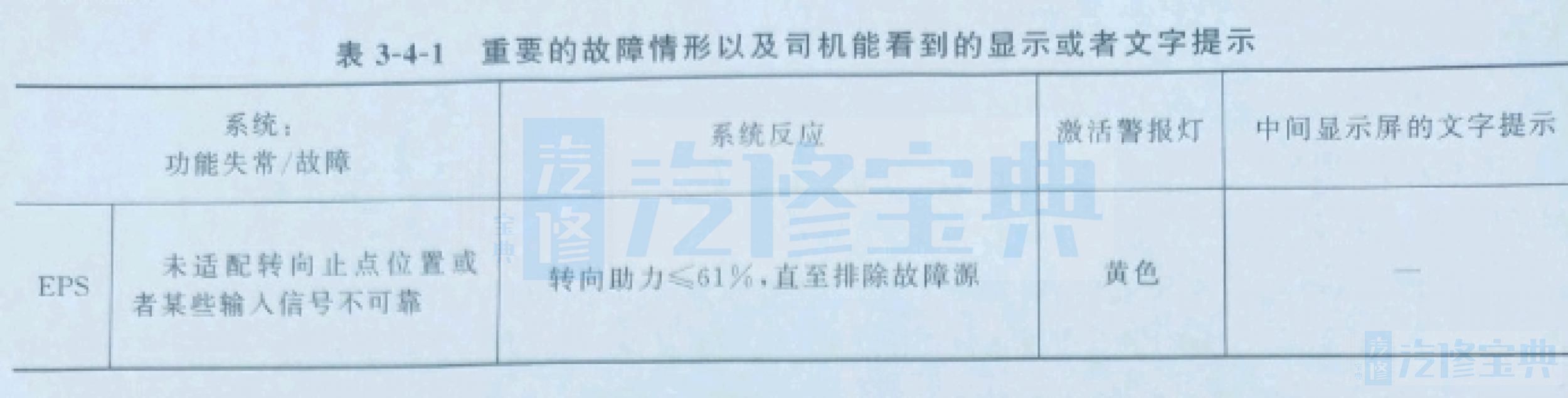
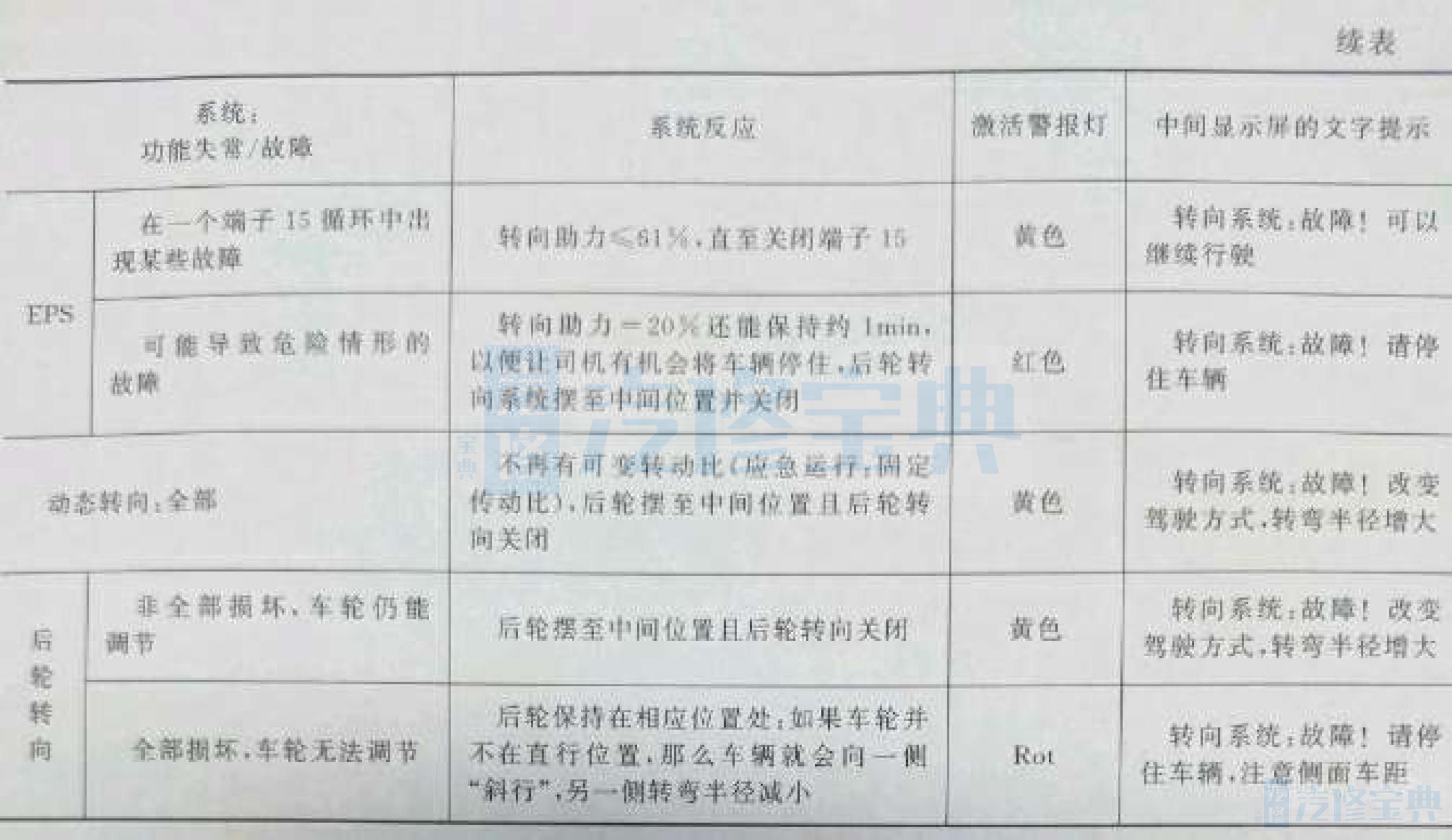
根据当前出现的故障的严重程度,会激活相应的应急程序,系统的全部功能也会尽可能长时间地保持正常工作状态。表34-1列出了重要的故障情形以及司机能看到的显示或者文字提示。