交通信号灯识别系统包括检测和识别两个基本环节:首先是定位交通信号灯,通过摄像机,从复杂的城市道路交通环境中获取图像,根据交通信号灯的颜色、几何特征等信息,准确定位其位置,获取候选区域;然后是识别交通信号灯,检测算法中,已经获取交通信号灯的候选区域,通过对其分析及特征提取,运用分
类算法,实现对其分类识别。
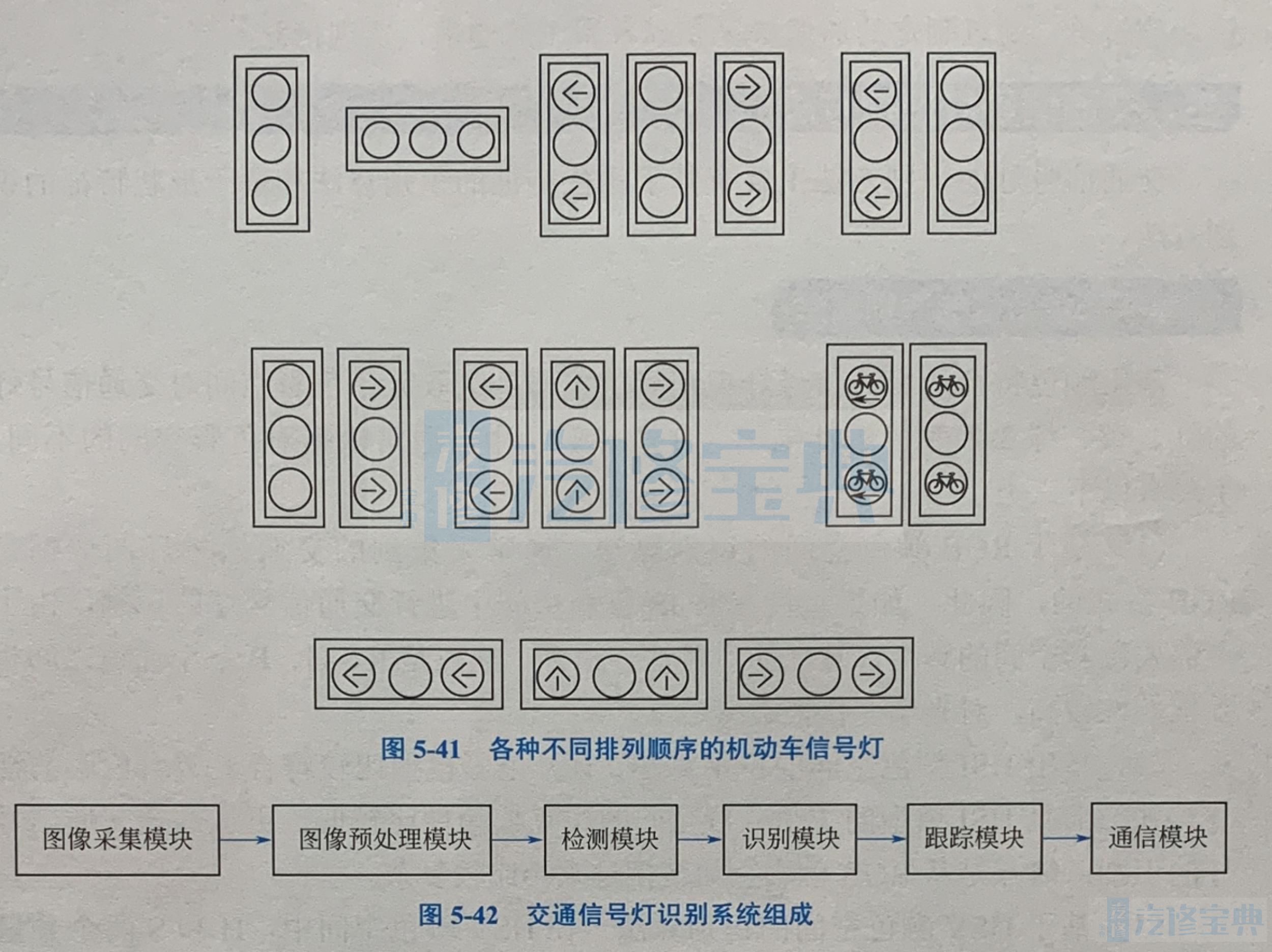
交通信号灯有各种识别系统。如图5-42所示为某交通信号灯识别系统,它主要由图像釆集模块、图像预处理模块、检测模块、识别模块、跟踪模块和通信模块等组成。
(1)图像采集模块 摄像机成像质量好坏影响后续识别和跟踪的效果,一般采用彩色摄像机,其中摄像机的镜头焦距、曝光时间、增益、白平衡等参数的选择都对摄像机成像效果和后续处理有重要影响。
(2)图像预处理模块 图像预处理模块包括彩色空间选择和转换、彩色空间各分量的统计分析、基于统计分析的彩色图像分割、噪声去除、基于区域生长聚类的区域标记,通过图像预处理后得到交通信号灯的候选区域。
(3)检测模块 检测模块包括离线训练和在线检测两部分。离线训练通过交通信号灯的样本和背景样本的统计学习得到分类器,利用得到的分类器完成交通信号灯的检测。
4)识别模块 通过检测模块在图像中的检测定位,结合图像预处理得出的信号灯色彩结果、交通信号灯发光单元面积大小和位置先验知识完成交通信号灯识别功能。
(5)跟踪模块 通过识别模块得到的结果可以得到跟踪目标,利用基于彩色的跟踪算法可以对目标进行跟踪,有效提高目标识别的实时性和稳定性。运动目
标跟踪方法可分为四类,分别是基于区域的跟踪方法、基于特征的跟踪方法、基于主动轮廓线的跟踪方法和基于模型的跟踪方法。
6)通信模块 该模块是联系环境感知模块、规划决策模块与车辆底层控制模块的桥梁,通过制定的通信协议完成各系统的通信,实现信息共享。