一、概述体式底盘管理系统(ICM)主要有两个目的,一是提高各个动态行驶系统的性能;二是改善各个动态行驶系统的共同作用。 在每一种行驶状况下,现已能够选择并触发最合适的执行器,以实现希望对动态行驶施加的影响。当然,同时使用多个执行器也可能有益。这方面的例子可能有车轮各自的制动干预或通过一体化主动转向控制的叠加转向角。1CM控制单元的第一项任务是为整车中的系统提供信号形式的动态行驶状态。因此,以前单独安装的DSC传感器已经集成到ICM控制单元中。于是全部系统都能够使用由CM控制单元提供的相同信息。结果是,尤其在系统已联网时能够降低故障发生概率并提高系统的可靠性。 用动态行驶开关操作动态行驶控制。有四个可选程序可供动态行驶控制系统使用①舒适模式; ②标准模式; ③运动模式; ④ SPORT+模式。 将描述下列部件: ①ICM控制单元; ②高度传感器; ③中央控制台操作设备; ④伺服转向助力系统阀门; ⑤电控节流孔阀门。
二、ICM控制单元在ICM控制单元中,安装了一些原来被单独布置在DSC传感器内的传感器。利用这些传感器,ICM控制单元可计算出一些对于车辆的动态行驶状态至关重要的量:
①纵向加速度和纵向上的车辆倾斜。
②2横向加速度和横向上的车辆倾斜。
③偏航角速度。
传感器信号首先与传感器外壳有关。动态行驶系统需要这些量,但却是以车辆的坐标系为基准。ICM控制单元将进行必要的换算。为此所需的修正值将通过CM控制单元调试时所作的匹配进行确定并保存在更换了CM控制单元之后,需要对所集成的传感器进行匹配。匹配必须在车辆位于纵向和横向上均为水平的底面上的情况下进行。这时,总线端15必须接通。ICM控制单元内部结构见图4-1。
ICM控制单元有标准型和高级版本。高级版本的区别在于:
①更大的微处理器(是计算一体化主动转向控制和自适应巡航控制系统的调节量所需的)。
②冗余橫向加速度和偏航角速度传感器(一体化主动转向控制的安全要求)。
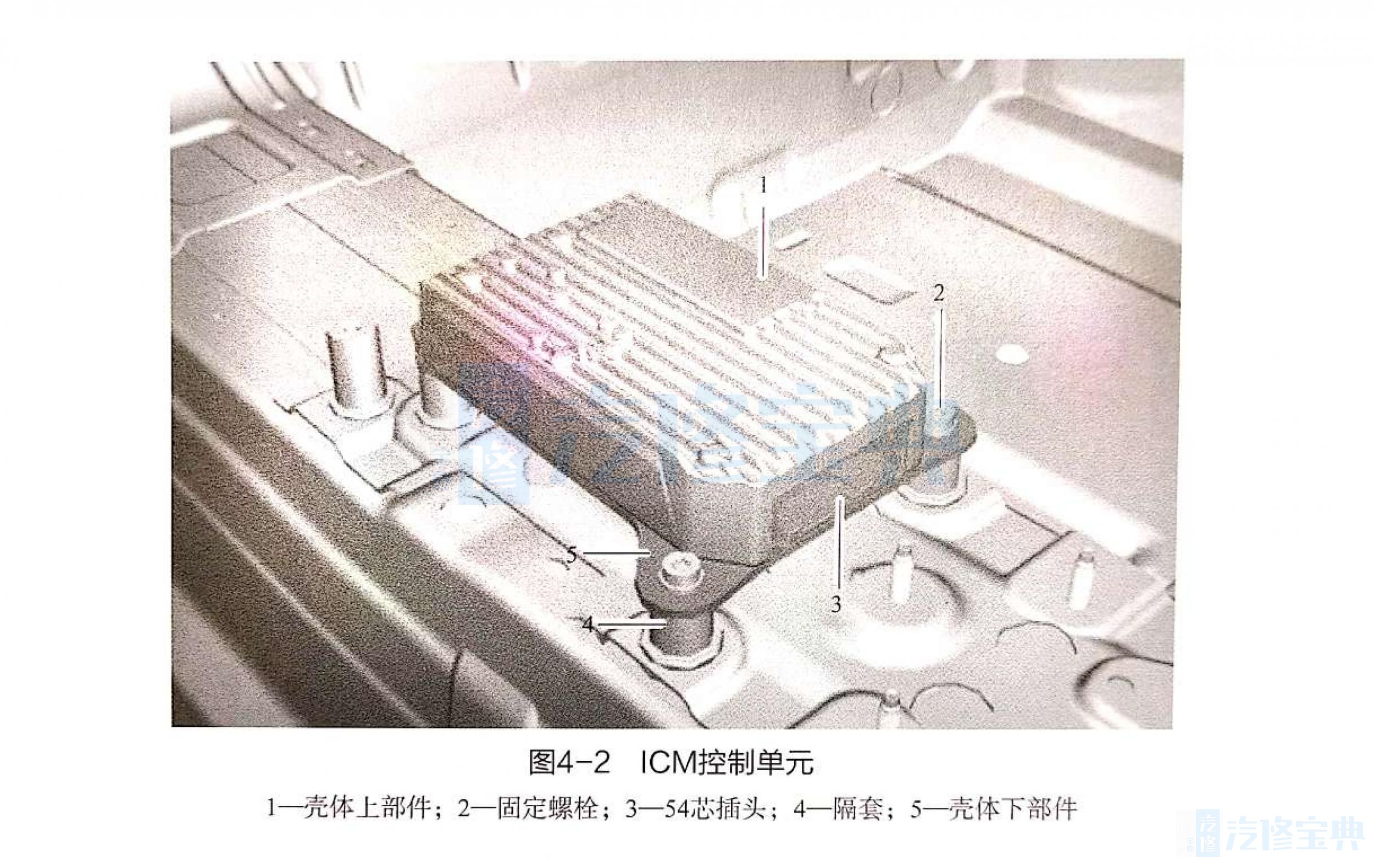
ICM控制单元布置在车辆重心附近,见图4-2。
该控制单元利用四个铝合金螺栓和隔套固定在变速箱传动轴盖板上。该固定方式必须令控制单元与车身的连接没有间隙。否则,便可能引起控制单元外壳振动,从而严重影响集成式传感器的工作。该固定系统的第二项任务是将热量从控制单元传导到车身上。