

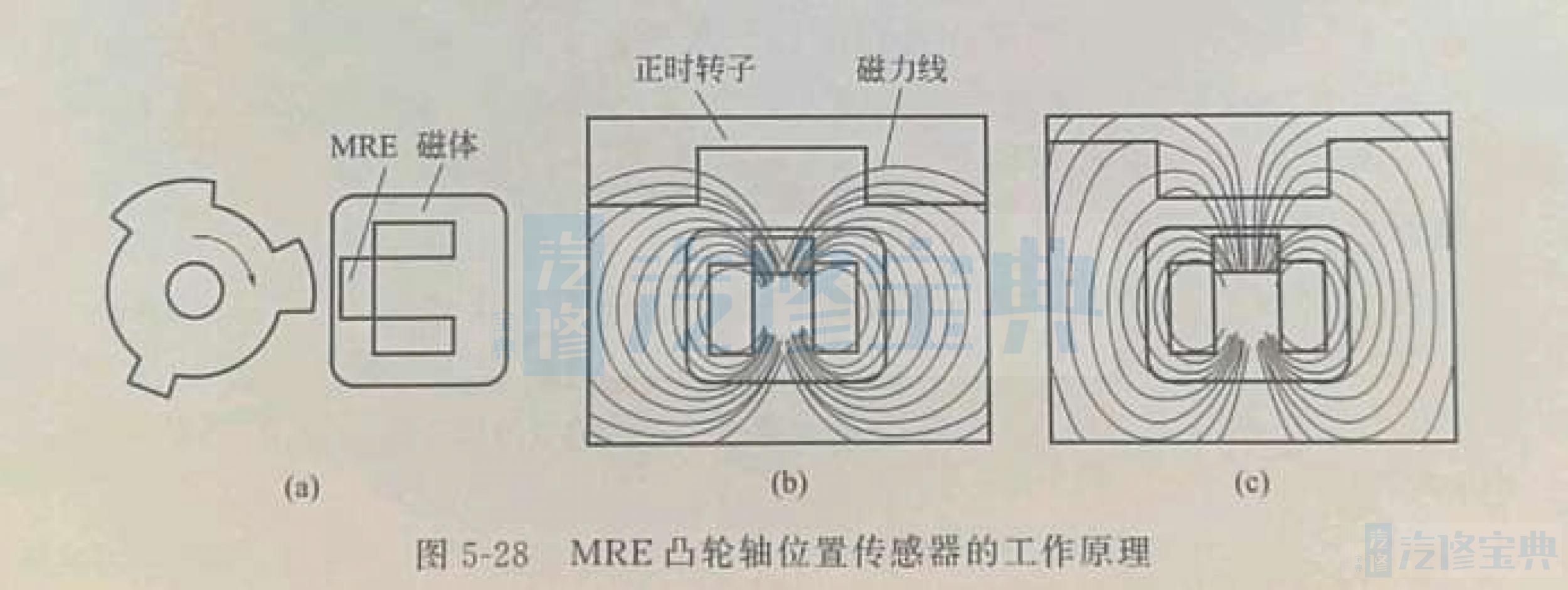
MRE型凸轮轴位置传感器由MRE、磁铁和传感器组成。通过传感器的磁场方向随正时转子外形(凸起和未凸起部分)的不同而改变。因此,MRE电阻改变,输出至ECM的电压也随之升高或降低。ECM根据此输出电压检测凸轮轴的位置。 MRE凸轮轴位置传感器的结构如图5-28(a)所示,由信号发生器、磁铁和用树脂封装的信号处理电路的集成电路模块组成。当传感器的磁头正对转子凹槽时,磁力线向两侧的翼片分布构成闭合磁路,此时磁阻元件电阻较小,通过磁阻元件的磁力线较少,磁场强度较弱,且磁力线与磁阻元件成一定角度,如图5-28(b)所示,此时磁阻元件输出5V高电平信号。当磁阻传感器的磁头正对转子翼片时,磁力线通过正对的翼片构成闭合磁路,此时磁阻元件电阻较大,通过磁阻元件的磁力线较多,磁场强度较强,且磁力线与磁阻元件垂直,如图528(c)所示,此时磁阻元件输出0V低电平信号因此,随着转子的旋转,翼片的凸起与凹槽交替变化,引起通过磁阻元件的磁力线的强弱和角度发生改变,由于磁阻效应的作用,磁阻元件的电阻也发生变化,通过MRE装置的电流也随之改变,这种电流的变化由信号放大电路、滤波电路和整形电路转换成二进制数字信号,并输送给发动机ECU。发动机ECU根据此信号判别进、排气凸轮轴位置。






返回顶部