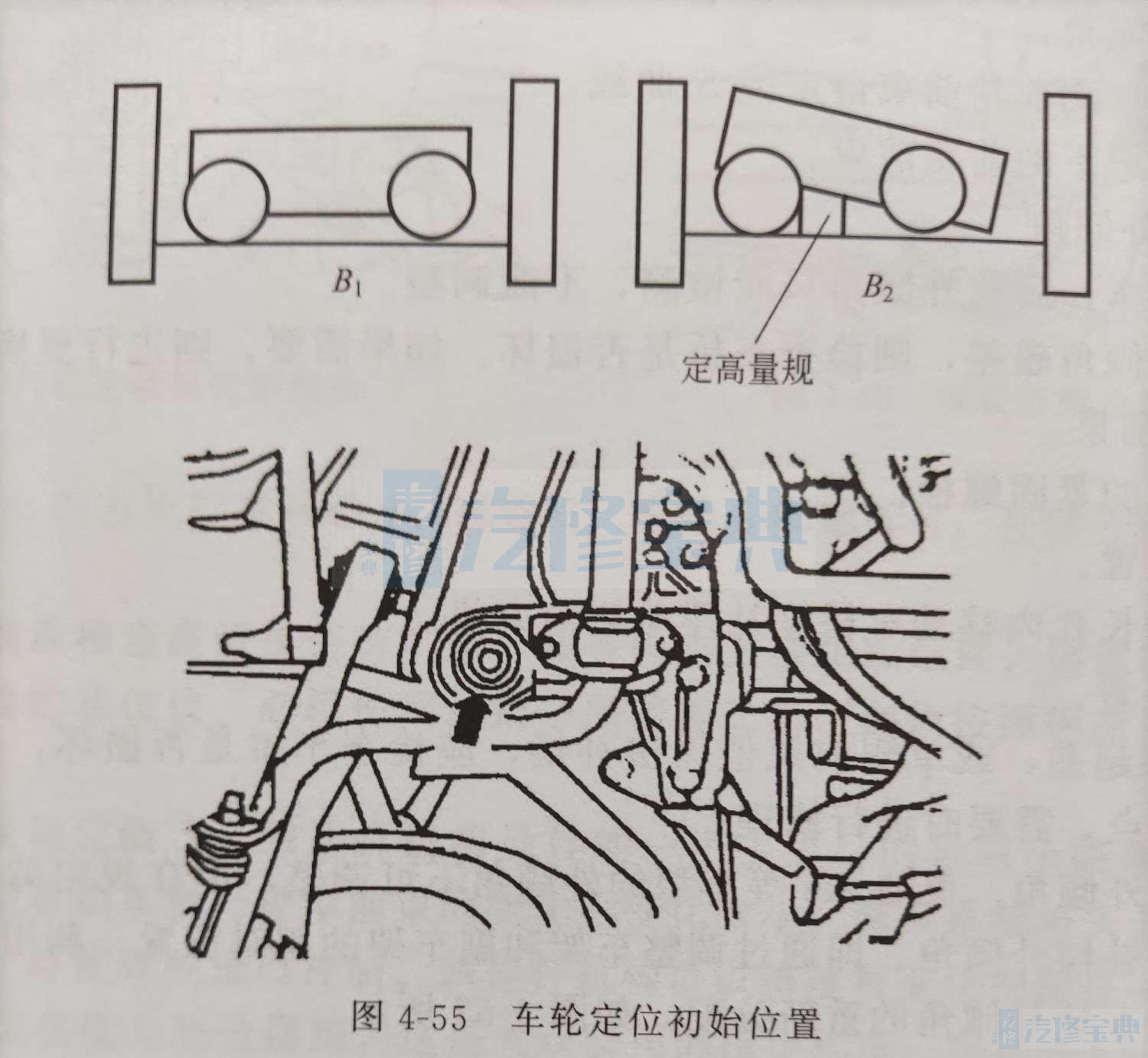
1.检测过程: (1)初始位置车轮定位的初始位置,如图4-55所示。
(2)奥迪A6(或帕萨特B5)的前桥前束曲线由两个因素决定:未举起60mm的前束测量值设定为C1和对应的初始位置设定为B1(前悬架弹簧处于车辆空载状态下的长度)。
B1=0 E(C1,0)前悬架弹簧,在B1位置的基础上向上伸长60mm后的位置称为B2位置,在B2位置上获得的前束测量值为C2。
B2=60mm F(C2,60)前束测量值C2减去C1所得的前束值成为前束恒定值S。
S=C2-C1
(3)方法:
①装上VAG1925/3或VAG1925/4、VAG192516、VAG1925,将螺纹杆拧出到与副车架的前部螺栓(图4-55中箭头所示)接触位置,这时车辆就处于初始位置。
②在此位置检测车轮定位,看一下每个车轮的前束值是否与规定值相等。如果需要,可调节转向横拉杆长度来调整前束。
③将车举起。进行下一步时,应该保证抬起车辆,车轮仍与转台接触。将车桥千斤顶安装到前举升点处,并举起进行测量车辆举高60mm,拉出螺纹杆内的套筒并用锁销固定,保证锁销(箭头所指)正确位置,如图4-56所示。
④将车放到VAG1925上。
2.车辆定位操作(1)顺序。
①检测后轮外倾角。
②检测后轮前東。
③检测前轮外倾角。
④如果需要,检测前轮前束恒定值S曲线。
⑤检测初始状态下的前轮前束。
(2)检测后轮外倾角。
①前轮驱动的车,后轮外倾角只能检测,不能调整。
②如果后轮外倾角超差,则检查车桥是否损坏。如果需要,则进行更换。
(3)补偿后轮前束。
①松开支座上的紧固螺栓。
②松开制动装置。
③在支座上的长孔内移动车桥来补偿单侧前束值。
④装好制动装置。
⑤如果总前束超差,或单侧前束值无法补偿,应检查车桥是否损坏,必要时更换。检查车身与后桥连接点,需要时进行修理。
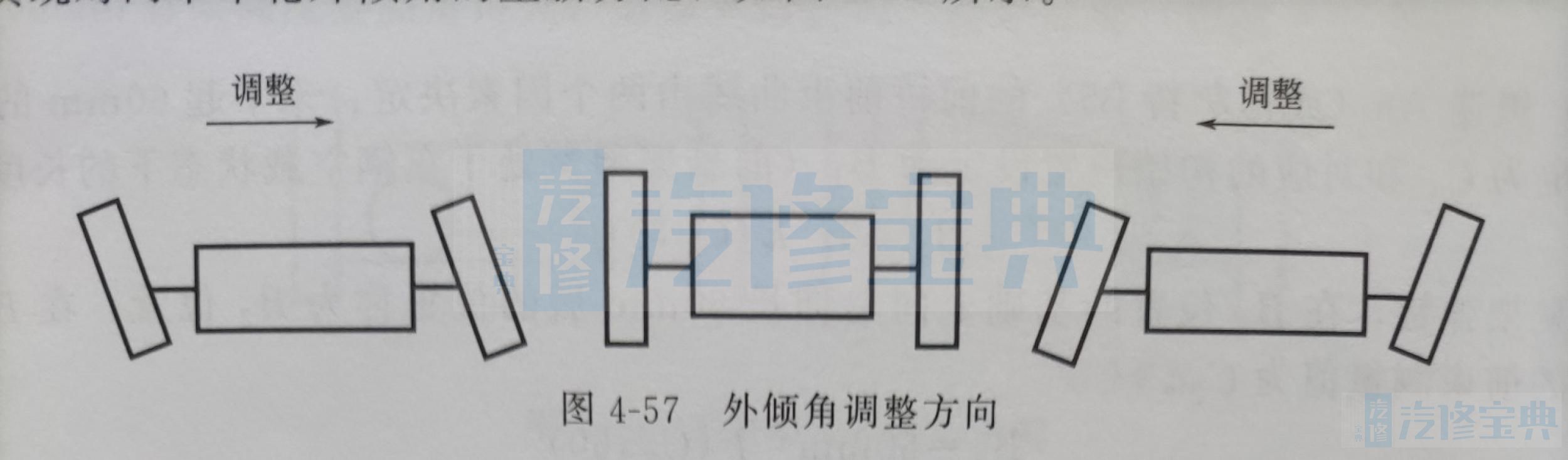
(4)补偿前轮外倾角奥迪A6等车型的外倾角不可调整,但在规定的公差范围内,通过移动副车架可以补偿外倾角。即通过调整车架和副车架的相对位置,利用副车架上重心的偏移,实现对两个车轮外倾角的重新分配,如图4-57所示。
其调整步骤如下。
①取下前隔声板。
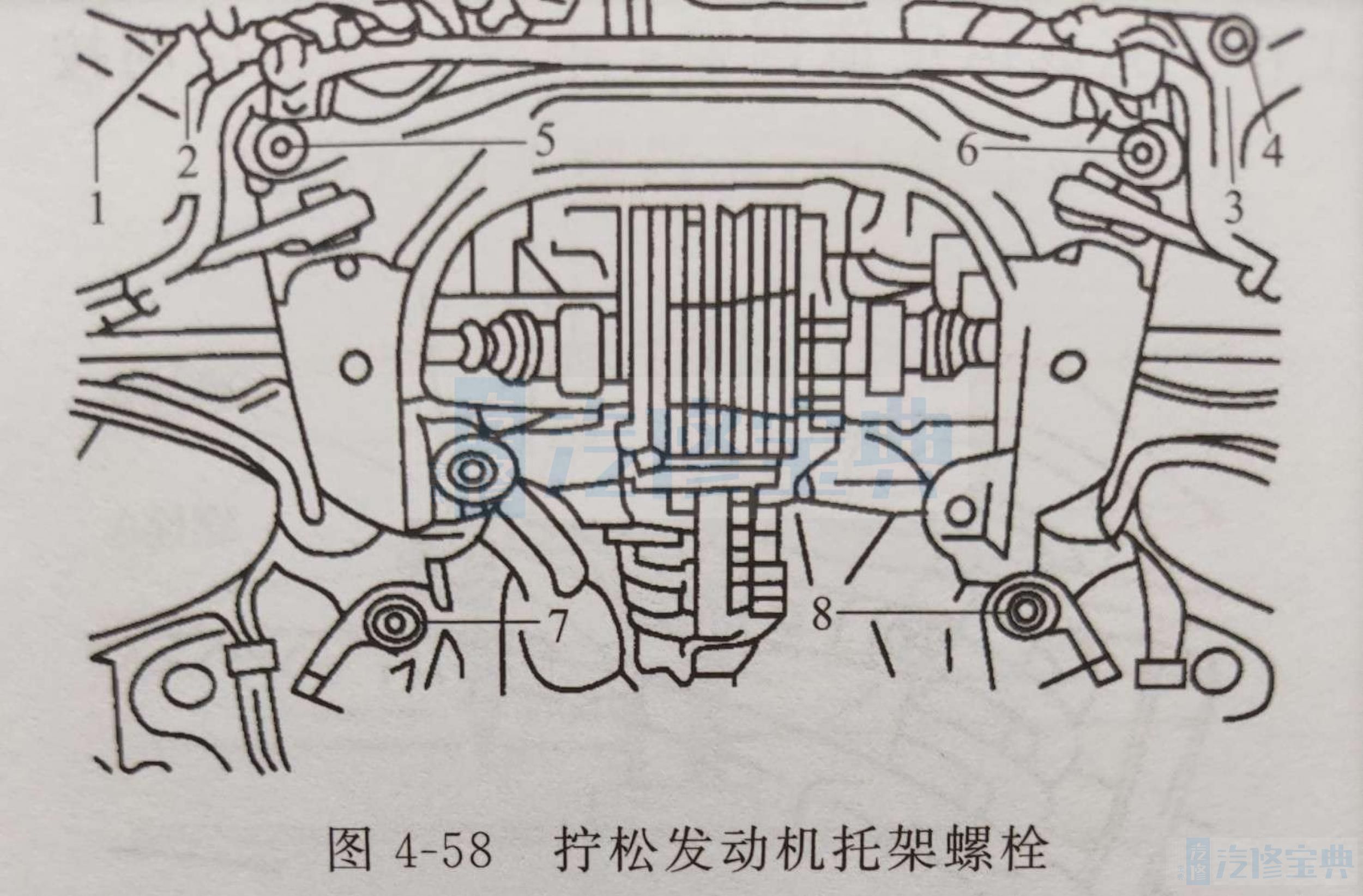
②松开螺栓1~8,并将螺栓1~4取下,如图458所示。
应该注意的是,螺栓5~8是车架和副车架的连接螺栓。为了安全起见,不能取下,只能旋松。
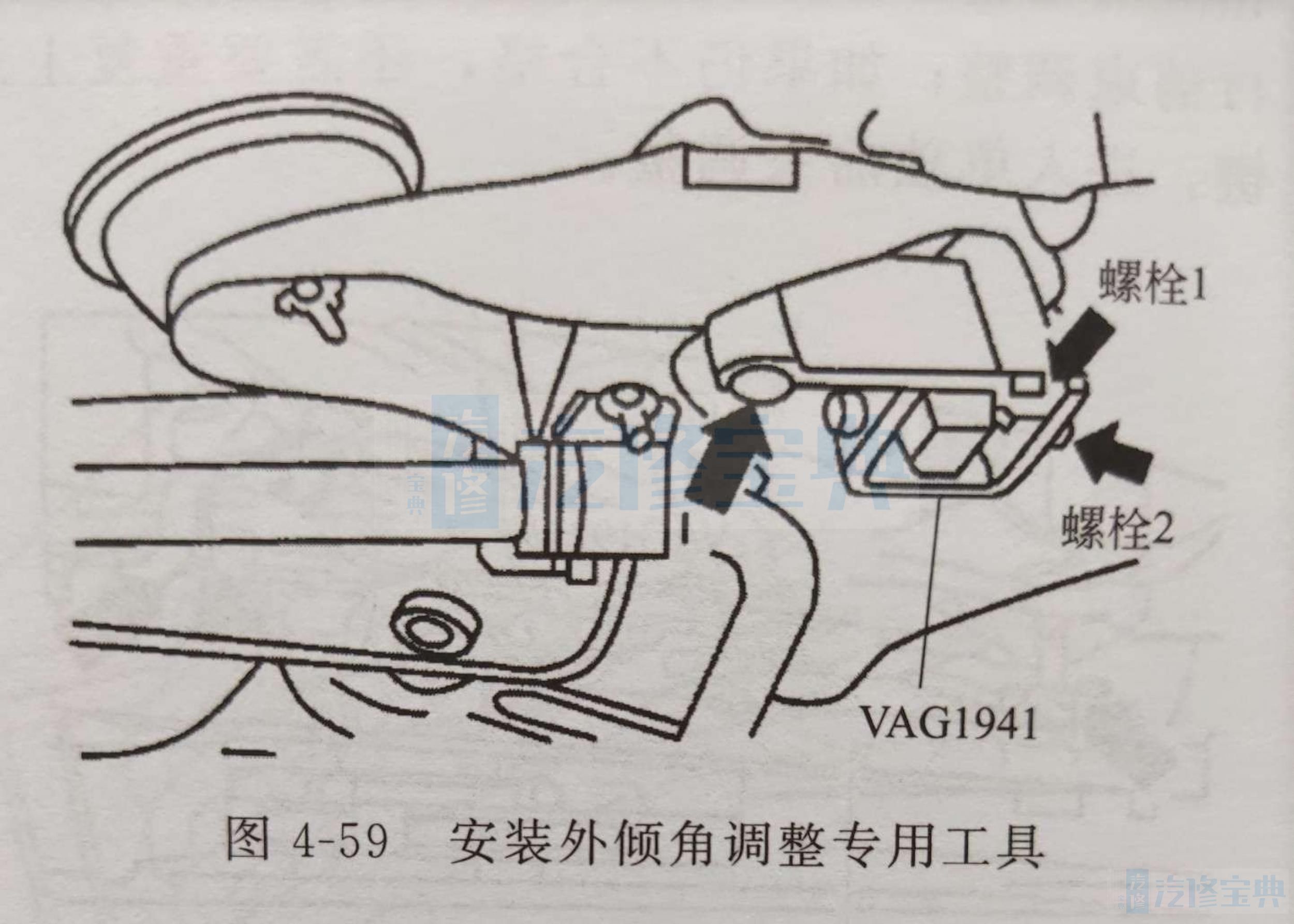
③安装上外倾角调整专用工具VAG1941,如图4-59所示。
④将专用工具VAG1941的两个螺栓插入位置3和4(或1和2)(图4-58)处的两个螺栓孔中,同时扭动专用工具上的调整螺栓2(图4-59),直到外倾角达到规定值。此时注意,不能旋得太紧,否则会调整不动。随着对拨块调整螺栓的调整,屏幕上外倾角的值将会发生变化。
⑤松开螺栓2(图4-58),检查外倾角,如果需要,再次调整。
⑥拧上新的六角头螺栓7和8(图458),拧紧至110N·m,再拧90°。
⑦拆下VAG1941,如果数值没有发生变化,即完成调整。拧上新的六角头螺栓5和6,拧紧至110N·m,再拧90°。
值得注意的是:螺栓5、螺栓6、螺栓7和螺栓8都是一次性的。必须将其中任意两个重新旋紧以保持定位,然后两两换下。
⑧以60N·m的力矩拧紧螺栓1、螺栓2、螺栓3和螺栓4。补偿外倾角后,必须检查车轮定位的情况。
注意:定位前应检查底盘是否有旷量,如有则先更换相应配件,再进行定位。必须使用大众专用测试软件的定位仪,必须使用大众专用调整工具,必须按照标准规定步骤进行测量和调整。
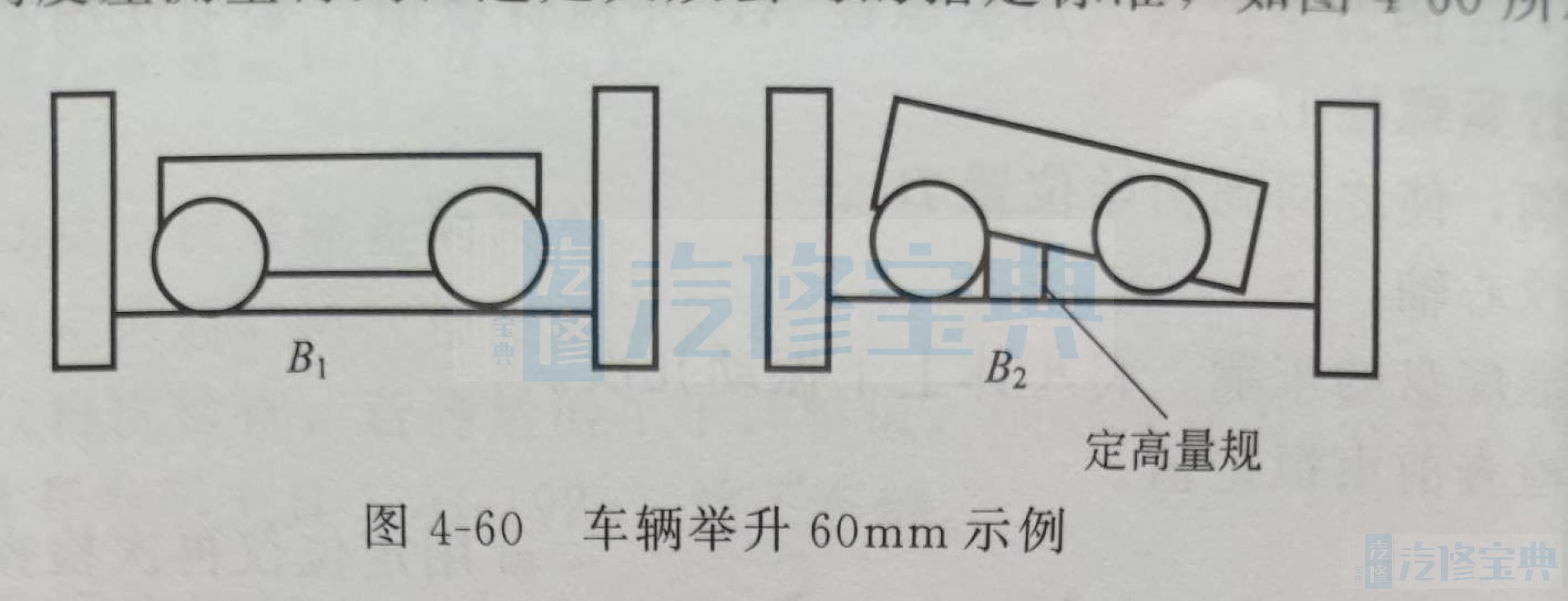
(5)调整前束恒定值S四连杆机构设计的一个主要目的是减小路面颠簸对驾驶的影响。这种设计直接影响车辆行进中前束的变化,变化太小,悬架系统将失去意义,也是不可能的;变化太大,将使驾驶难以控制。四连杆机构可以将这种变化控制在一定范围内。实际中通过60mm悬架高度差测量得到,这是大众公司的指定标准,如图4-60所示。
先在举升机平台上模拟车辆在平地上(以上统称B1位置)测量一次前束,得到一个前束1。然后将车辆前轴举起放到60mm定高量规上(以下统称B2位置),再测量一次前束得到前束2,前東2减前東1,应该在标准范围之内,如果超差,需要对两侧球头进行调整有。
3.德国百斯巴特定位仪车辆定位操作:
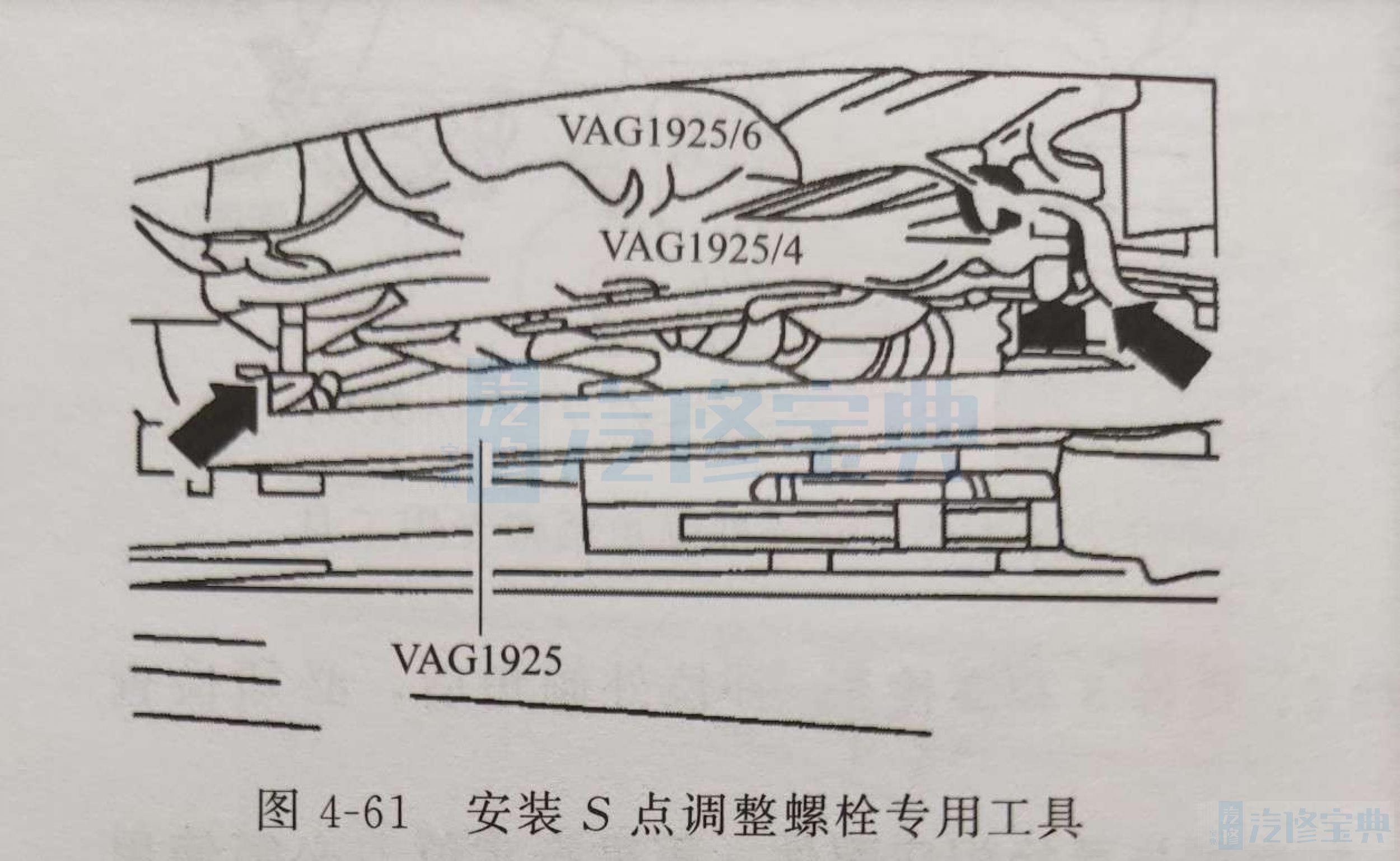
操作中,进入定位仪的调整画面后,定位仪应将自动对B1位置的前束进行测量,并在屏幕上显示结果。这时,前束的公差带较宽,如果超差,需要先对横拉杆进行调整,使前束1合格,再次按下定位仪上的相应键F3,屏幕上将提示将车放到B2位置的量规上,如图460和图4-61所示。先将专用工具VAG1925架子连同量规1925/4放到举升机上、前悬架托架下,旋转升起1925/4下的螺杆,使1925/4量规刚刚接触到托架螺栓。然后用二次举升机将前轴抬起到足够高度,将1925/4量规拔出,在下面销孔中插上锁销,再放二次举升将托架螺栓正好落在锁销上。这时正是B2位置,按下F3键,屏幕上将显示B1位置和B2位置的前束差值。
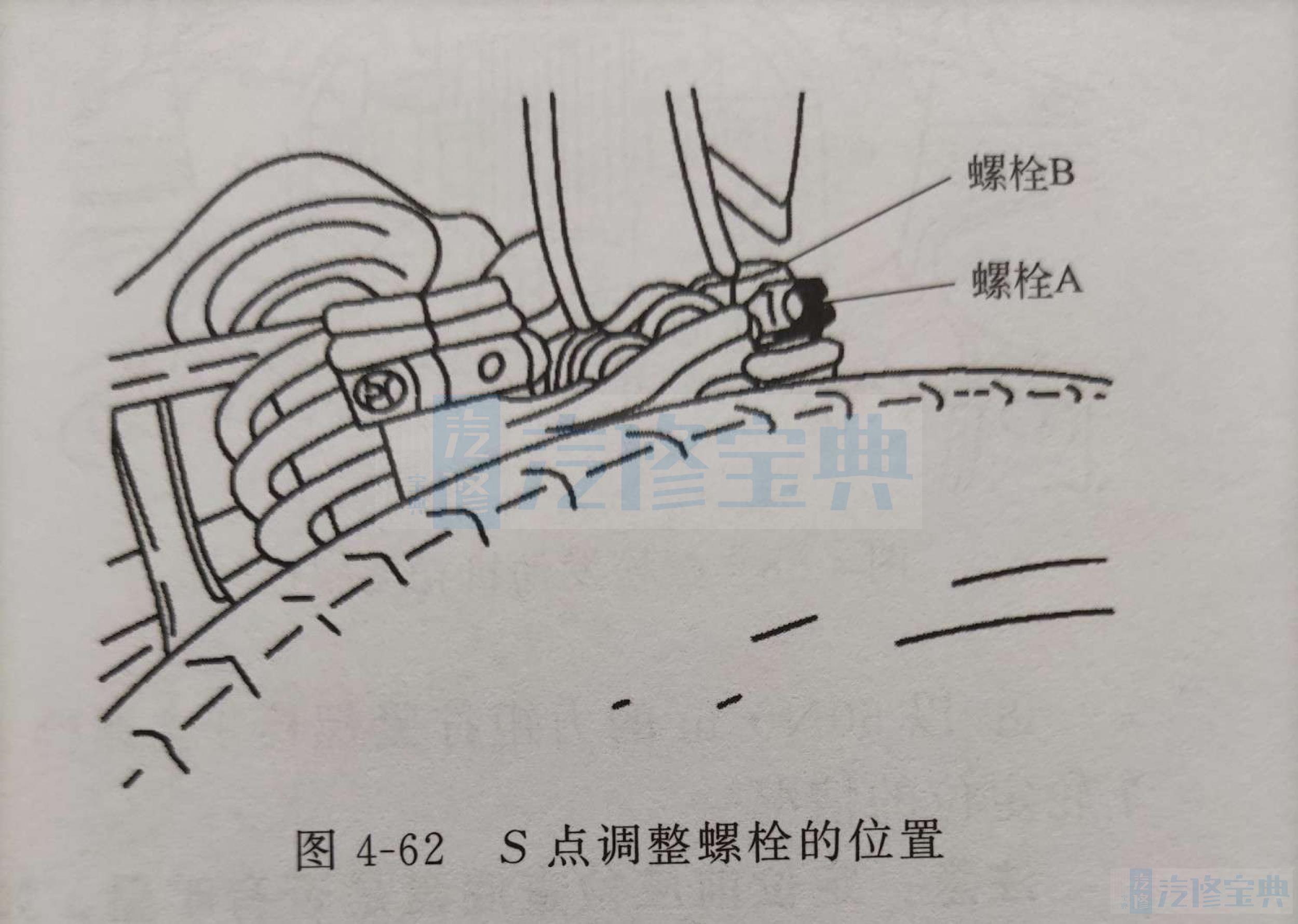
如果不合格,松开侧面球头调节紧固螺栓A,调整间隙螺栓B,如图4-62所示。注意这时屏幕显示前束差值上的数值变化很小。在调整后再次按下相应的按键,屏幕提示将车放到B1位置。这时需要将车前轴抬起,取出VAG1925,再将车放回水平位置。按下定位仪相应的按键,又一次测量出B2与B1的前束差值,如果已经合格,则可以进行下一步,进行前束调整;如果仍不合格,还需要重复上述工作。完成恒定值调整,再按一次相应的按键,进行单独前速调整。
调整步骤如下。
①松开螺栓A。
②将螺栓B拧出约4mm。
③尽量向下压转向横拉杆接头。
④拧入调整螺栓B,直至达到规定值。
⑤以45N·m的力矩拧紧六角头螺栓A,并检查该值。必须使用新的六角头螺母,以7N·m的力矩拧紧螺栓B。
⑥放下车辆,使之回到初始位置B1。
⑦拧紧螺纹心轴。
⑧对于标准底盘的车辆,将车体上下振动几次。
⑨调整后检查前束恒定值。
a.用定位仪再次检查前東恒定值。
b.如果测得值超出允许范围,应重新在位置B2(+60mm)进行调整。
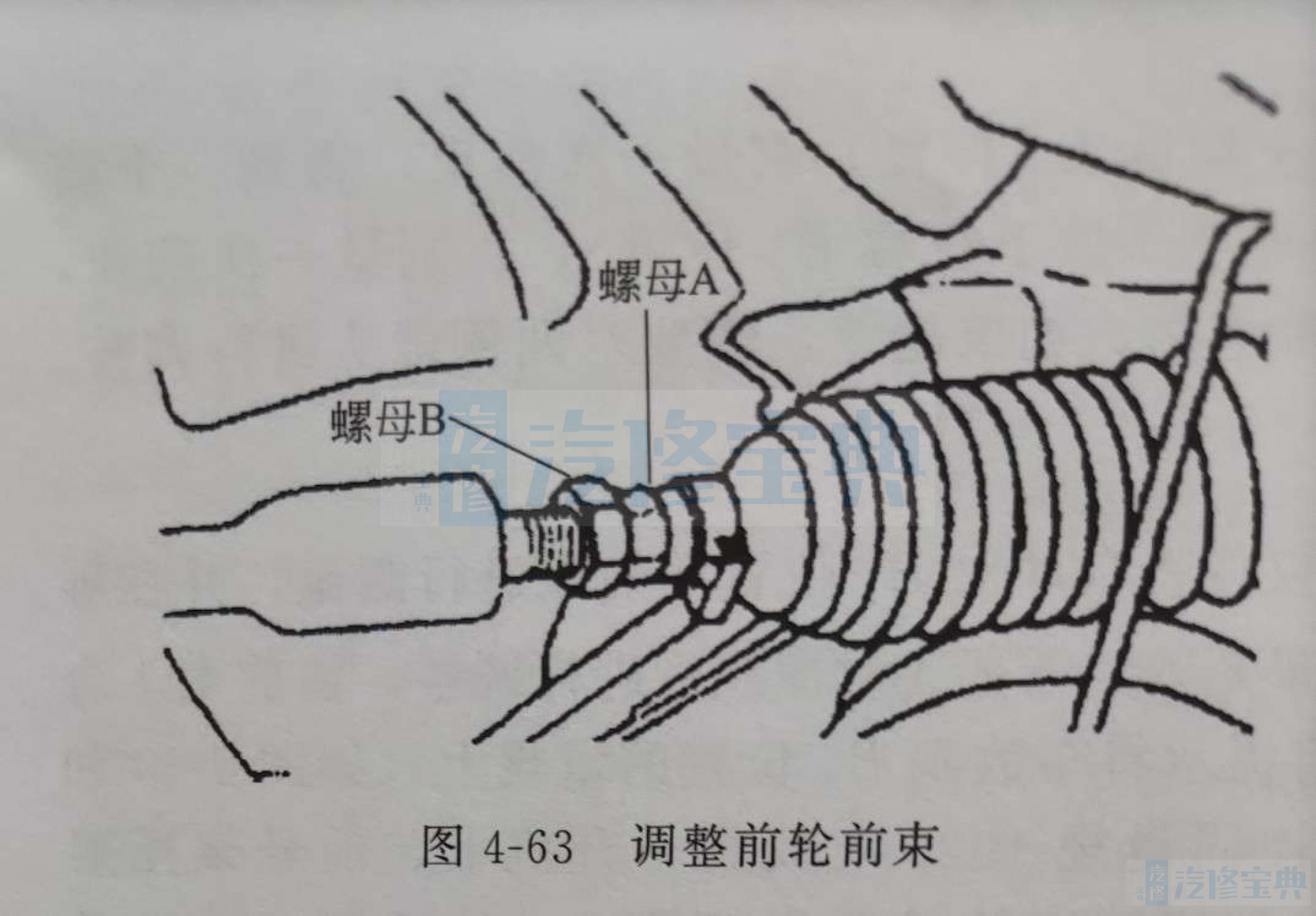
⑩调整前轮前束,如图4-63所示。
a.松开锁紧螺母B。
b.用六角头螺母A分别调整左右轮前束。
c.以40N·m的力矩拧紧锁紧螺母B,再次检査前束值。拧紧螺母B后,调整可稍有偏差。
注意:这里再以VAS6331定位仪进行检测调整。
VAS6331定位仪的检测调整步骤如下。
①摆正方向盘并用固定器锁止。
②将车辆前轮二次举升,在底盘前部下方的举升机上安装专用工具VAG1925。
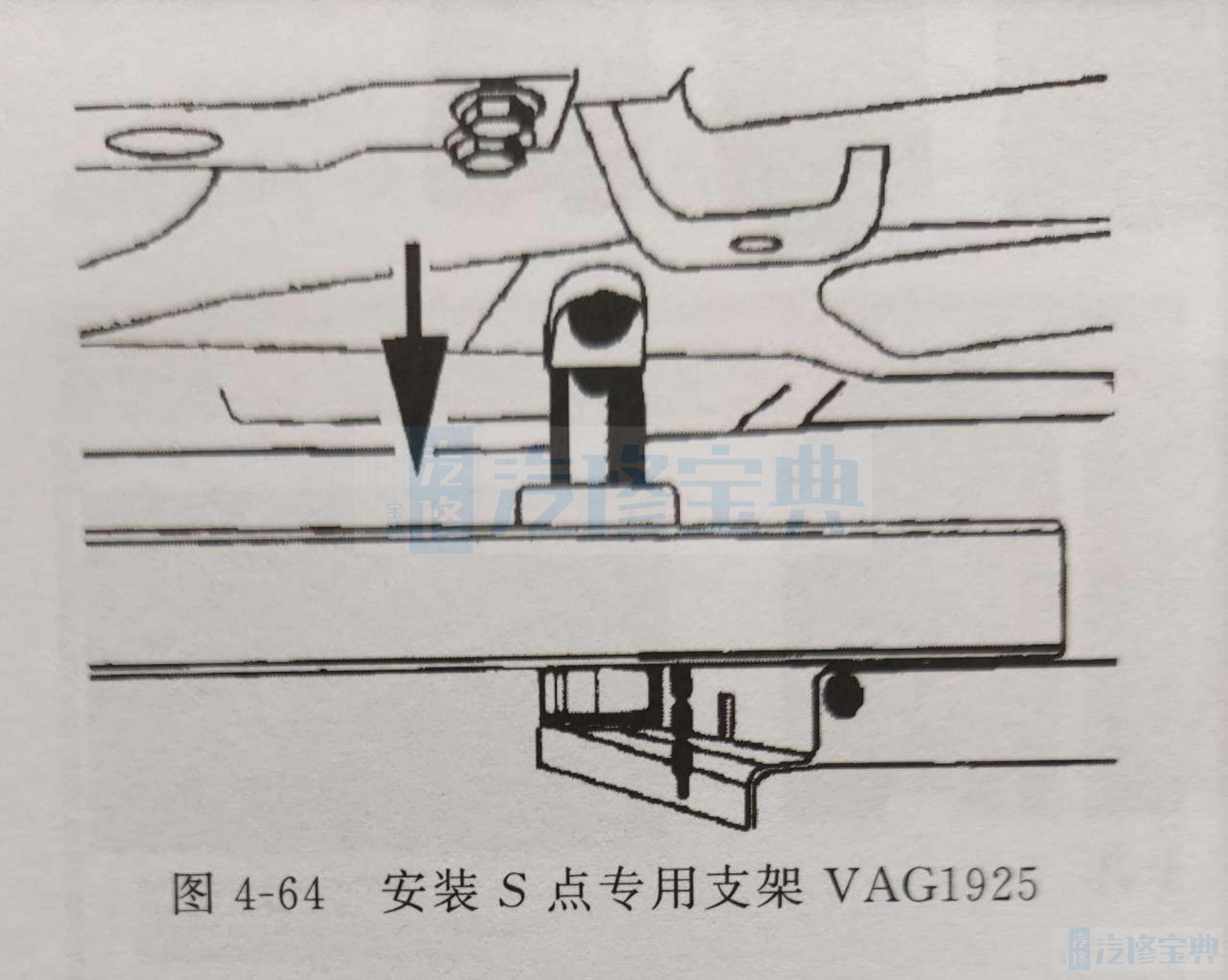
③安装上60mm接合器。
④将车辆慢慢放下,将车辆置于VAG1925上,如图4-64所示。
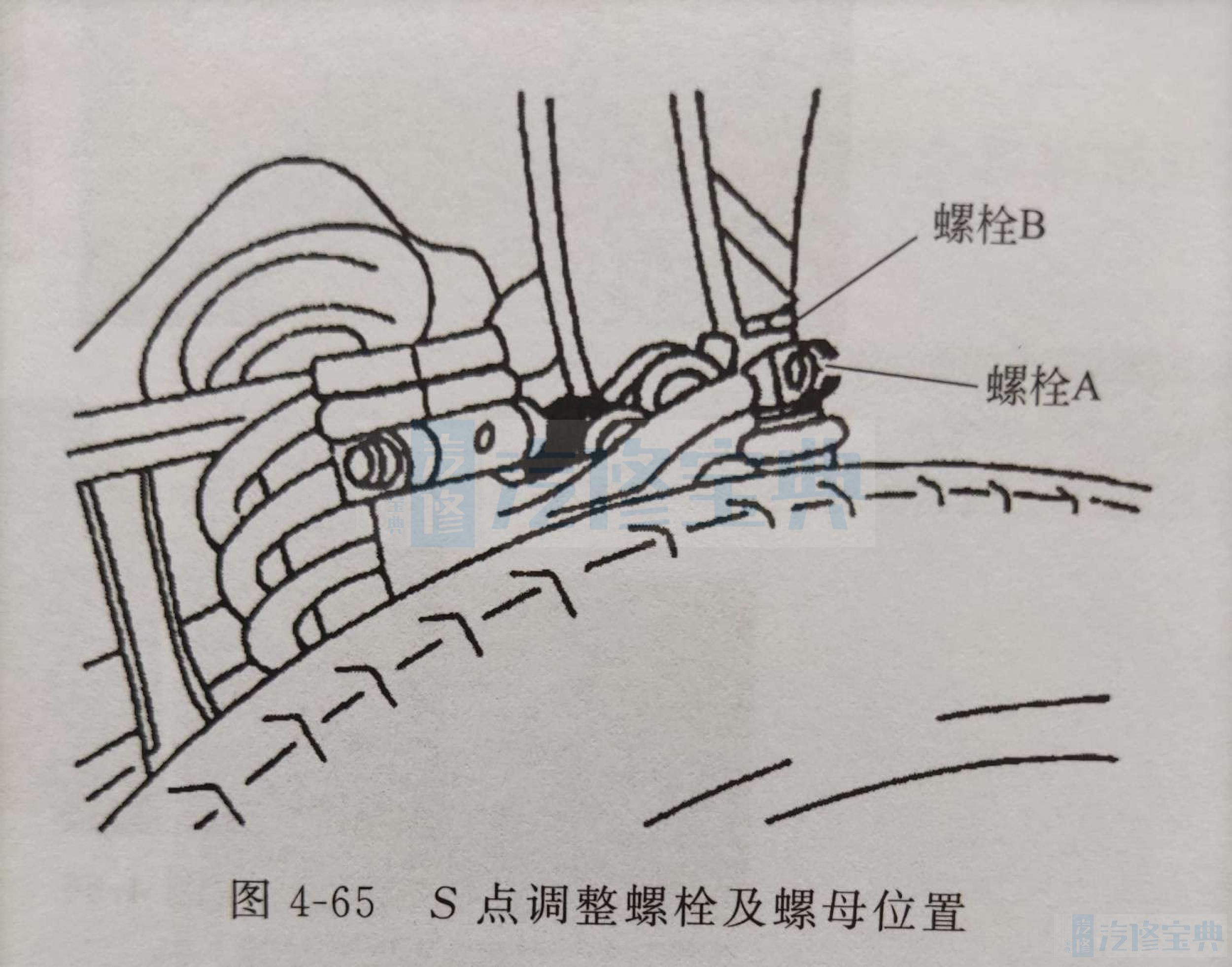
⑤调整前束恒定值S。
a.松开六角头螺母A,如图4-65所示。
b.螺栓B旋出约4mm。
c.将转向横位杆球销向下压直到止挡为止。
d.旋转调整螺栓B,直到精确地达到前束恒定值。
e.用45N·m的力矩拧紧六角头螺母A,并再次检查前束定值。
f.用7N·m的力矩拧紧螺栓B。
⑥放下汽车,使汽车重新回到B1位置。
⑦螺杆向下旋转。
⑧上下多次压动具有标准底盘的汽车。
⑨调整完前束恒定值后,再次检查前束恒定值。
⑩用四轮定位仪再次检查,若测量值小于调整值,则必须在B2位置上再次调整。二次举升,升高车辆,移开专用工具VAG1925,放下车辆。
4.传感器标定和日常维护:
(1)定位程序启动后出现“维修保养期已超过”定位仪使用一年或1000次,会出现此维护提示,建议对传感器做标定。要清除此维护提示,必须下载安装“ Reset service counter”服务程序。该程序运行的时候,程序会提示需要提供后缀名为“.lic”的密码文件。向百斯巴特办事处定制密码文件,即可清除此提示。其目的是督促对定位仪进行标定维护,保证测量精度。
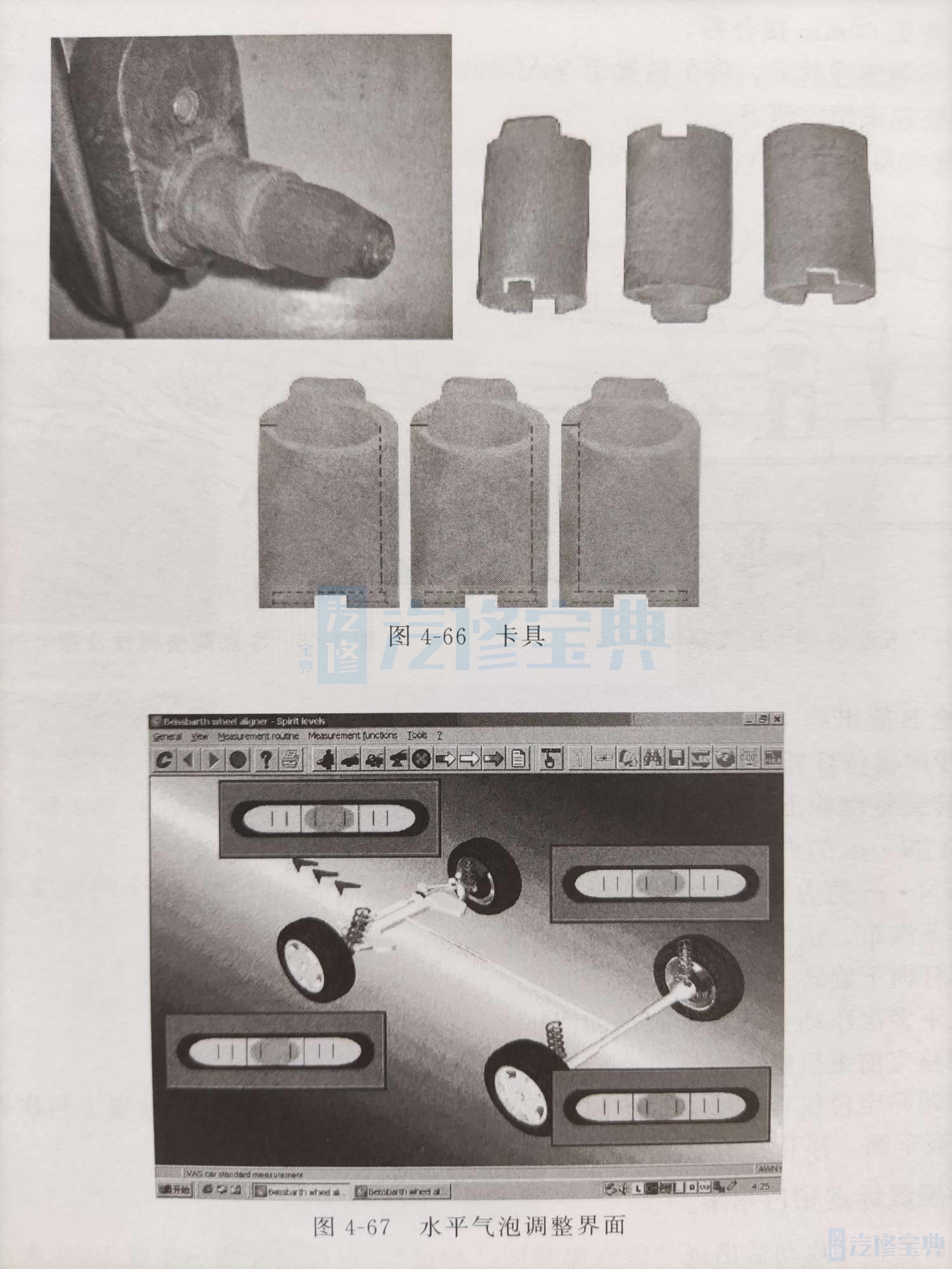
(2)卡具检查传感器是通过卡具装卡在车轮上的,所以卡具卡头的状态直接关系到测量精度。如图466所示,平时应注意观察卡具卡头是否出现磨损,磨损的卡爪应及时更换,避免其影响检测精度。斜面套管适用于轮毂条幅向外突出的轮毂。
(3)水平气泡调整如图4-67所示,当屏幕上显示的传感器水平状态和传感器上的实际水平气泡状态不一致时,需要进行传感器水平校正。此时需要将传感器上的气泡调整到正中水平,然后在程序里保存此水平位置。这样,屏幕显示的水平状态就和各个传感器实际水平状况相一致了。
(4)传感器标定当屏幕出现提示“检测数据超出公差范围或设备设置不正确”时,如果此提示是长时间出现而不是一闪而过,则表明定位仪测量精度不能保证,传感器需要做标
定。传感器标定仪器如图4-68所示。
如果此提示只是瞬间出现,可能是车身晃动过大引起的,没有关系。另外,当使用定位仪测量和调整的效果不理想时,建议立刻进行传感器标定,因为如果外倾角测量零点偏差过大时,不会出现此提示报警。
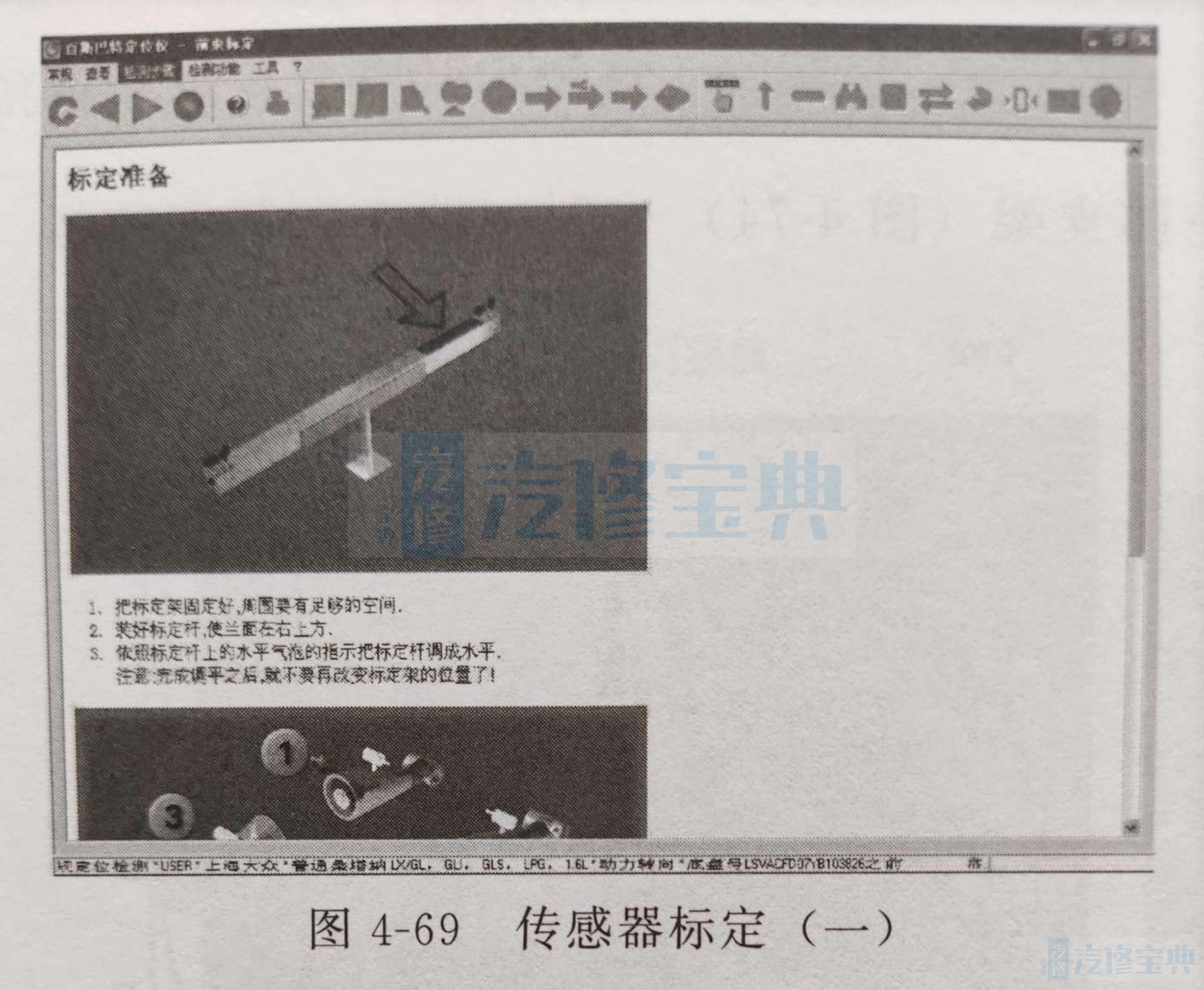
如图469所示,在定位程序界面下,选择“工具”菜单中的“传感器校正”操作。传感器校正包括前束校正、外倾角校正和水平气泡调整。在标定传感器之前,要先做水平气泡的调整,校正好传感器水平后再进行前束和倾角校正。
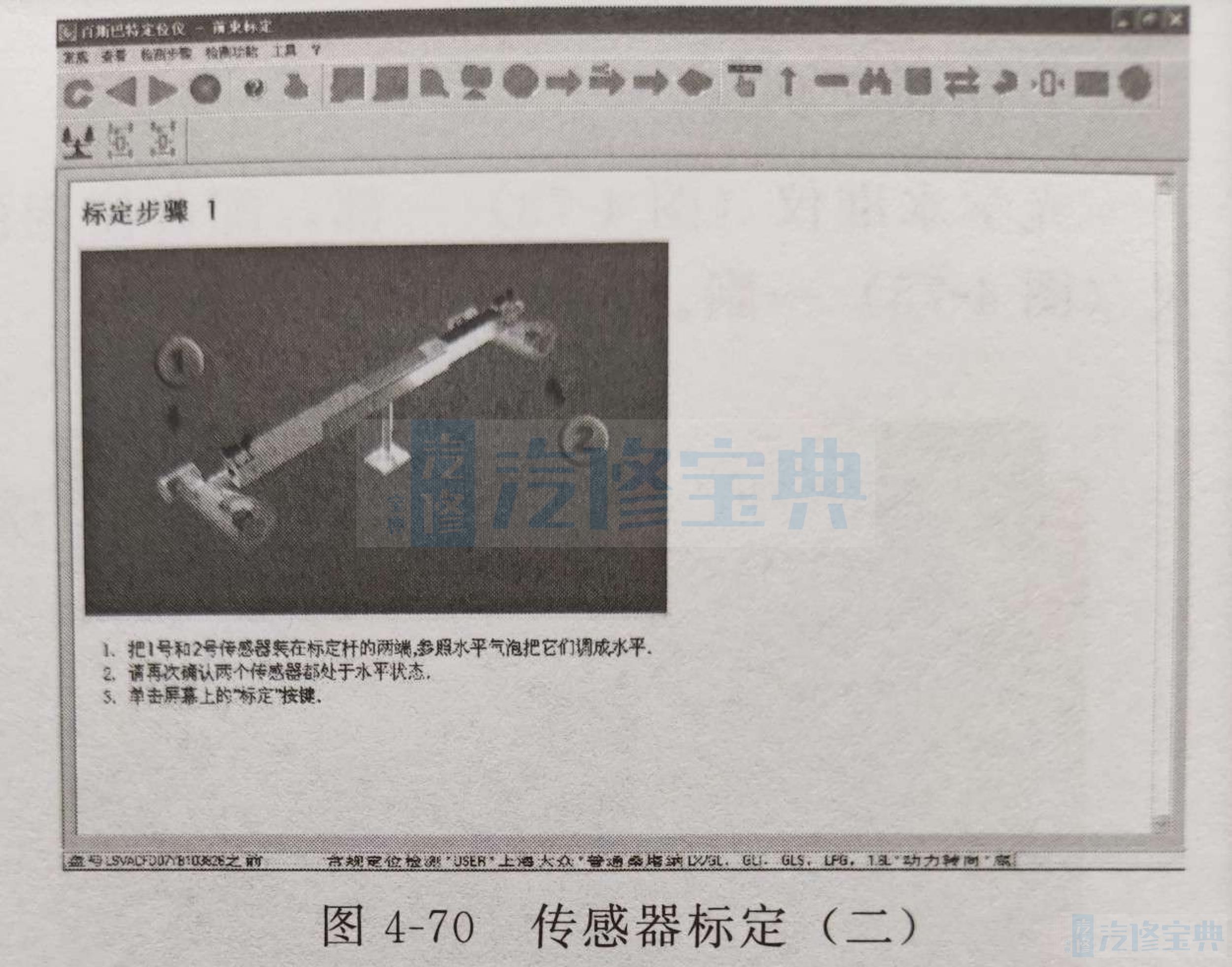
注意:在前束和外倾角标定中,都是只在标定步骤(1)中调整标定杆至水平位置,之后的定步骤中,不再重新调整标定杆的水平!
T形标定架一定要固定牢靠!建议用膨胀螺钉把T形标定架固定在有足够空间的地面上。
要保证标定杆上的水平气泡处于水平状态,同时放在标定杆两端的传感器也处于水平状态。把传感器和标定杆都放水平之后,点击屏幕的“前进”键,进入标定流程。
按照图4-70所示把1号和2号传感器放在标定杆的两端,把标定杆和两个传感器同时调成水平,然后点击工具栏上的“天秤”图标,进行传感器标定。
前束标定一共有八步,标定结東后会出现前束标定结果的报告。
如果标定过程操作准确,没有出现错误提示,则可点击工具栏中的“磁盘”图标来存储标定结果。
当看到屏幕提示“标定数值已经被存储”,则表明标定结果已经顺利存储。
接下来进行传感器外倾角的标定,外倾角标定步骤也是八步,标定过程与前束标定基本相同,按照标定程序引导操作即可,然后保存前束和外倾角标定的标定结果。
5.定位程序和数据的安装:
软件和数据的安装都需要钥匙文件,钥匙文件是“.Lic”文件,保存在随机的软盘或光
盘中。程序或数据安装文件是一个“.exe”文件。执行此“.exe”文件就可进行安装,安装过程中要找到到相应的“.lic”钥匙文件。安装时要保证计算机并口上的加密狗(图4-72)安装正确。原厂所带的钥匙盘和光盘需要用户妥善保管。程序和数据是按照模块安装的。模块很多,每次要选择确认一下安装语言是英语。
四、举升机水平调整方法:
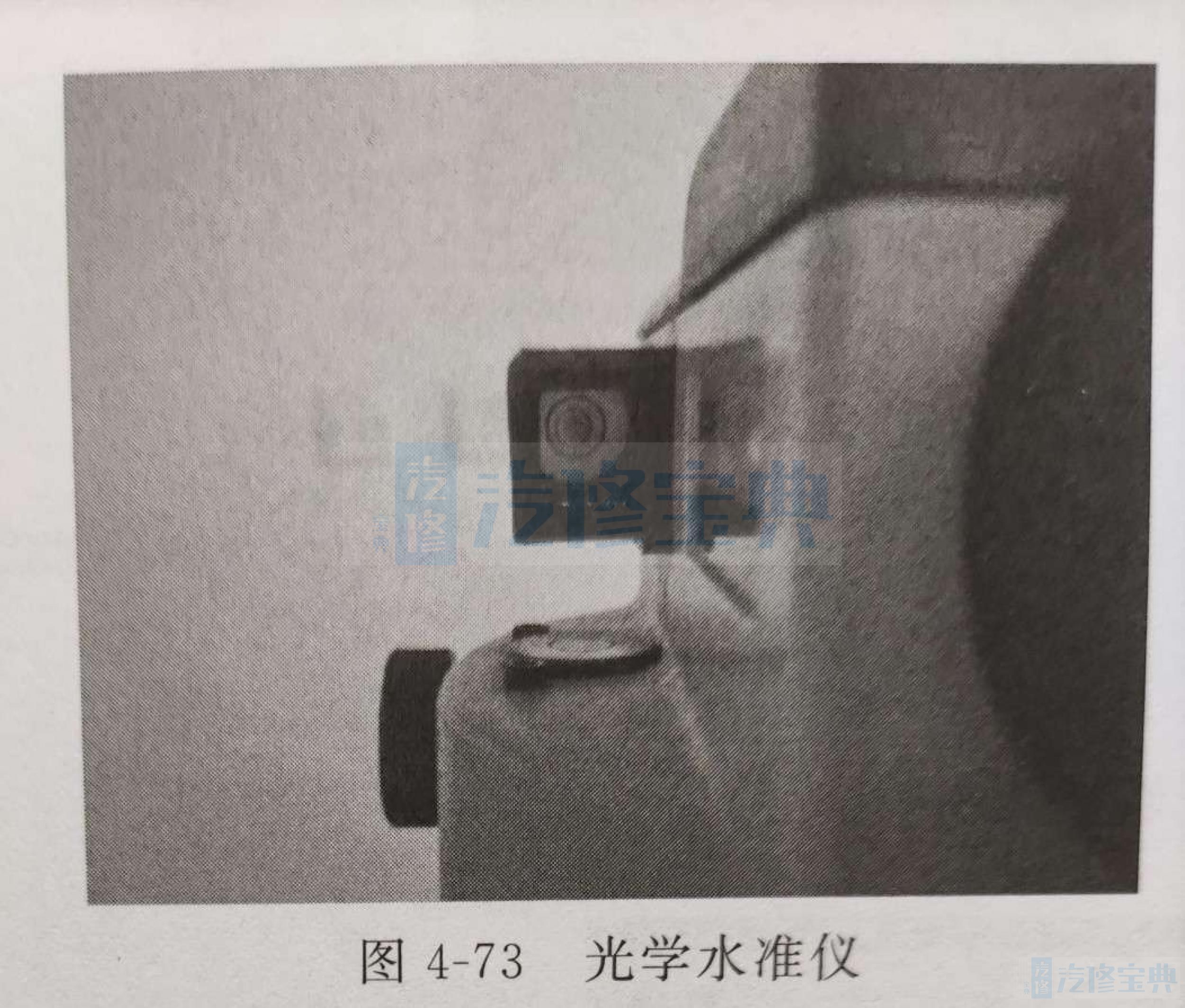
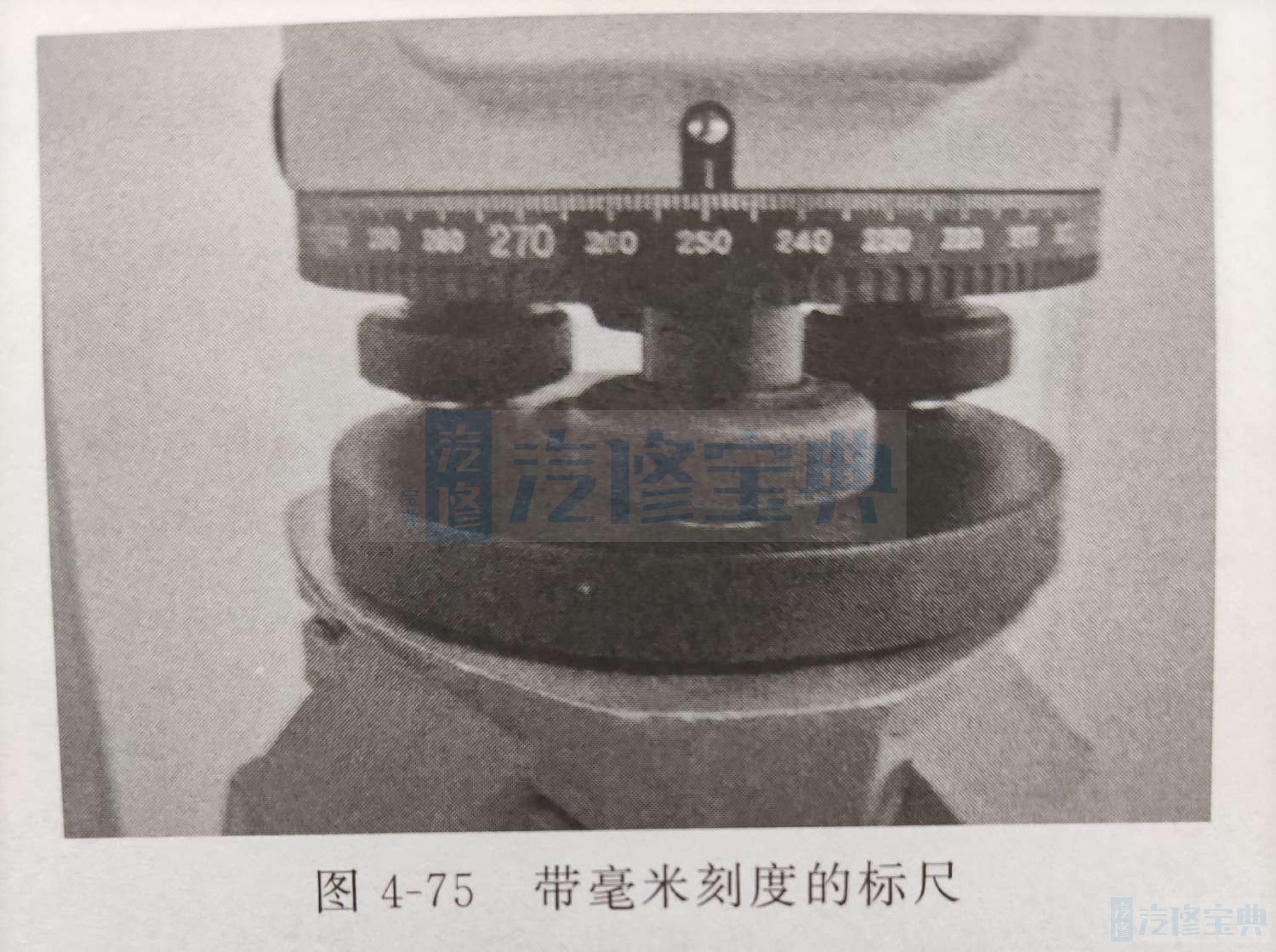
1.所需工具。
光学水准仪(图4-73)一部,配套使用的三脚支架(图4-74)一副,带毫米刻度的标尺(图4-75)一副。
2.水准仪使用方法:
支起三角支架,安装水准仪镜头。调节水准仪镜头的三点粗调钮,使水准仪的气泡置于反光镜中央。
对于一些型号的水准仪还需要调节左侧面旋钮,将大目镜左侧小目镜中线两侧的水线对接形成U字,侧面水平气泡调到中间,从而将镜筒调平。
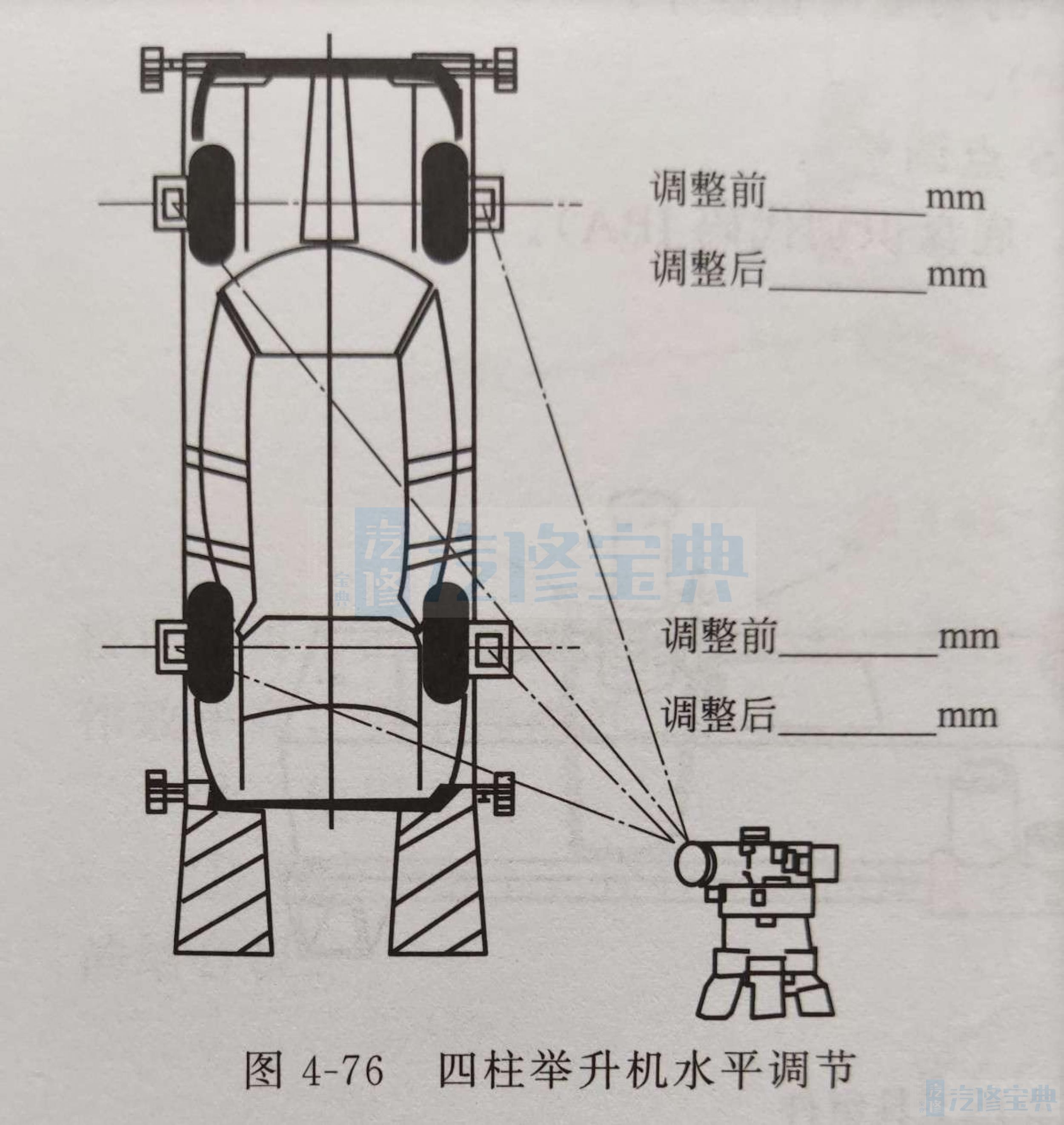
3.四柱举升机水平调节:
如图4-76所示,将举升机锁止到测量平面,依次把毫米刻度的标尺垂直竖立在转角盘和后滑板上,一共4个点。分别用水准仪测量这4个点的高度值。分别调整举升机立柱内的锁止杆的高度,使标尺在4个点的测量高度值相同。4个点水平调整好之后,锁紧锁止杆上端的锁紧螺母,使4个点水平高度不再变化。
①将水准仪立于四柱举升机后面。
②将平台升起,直到水准仪目镜可观测标杆的高度,固定(图4-77)。
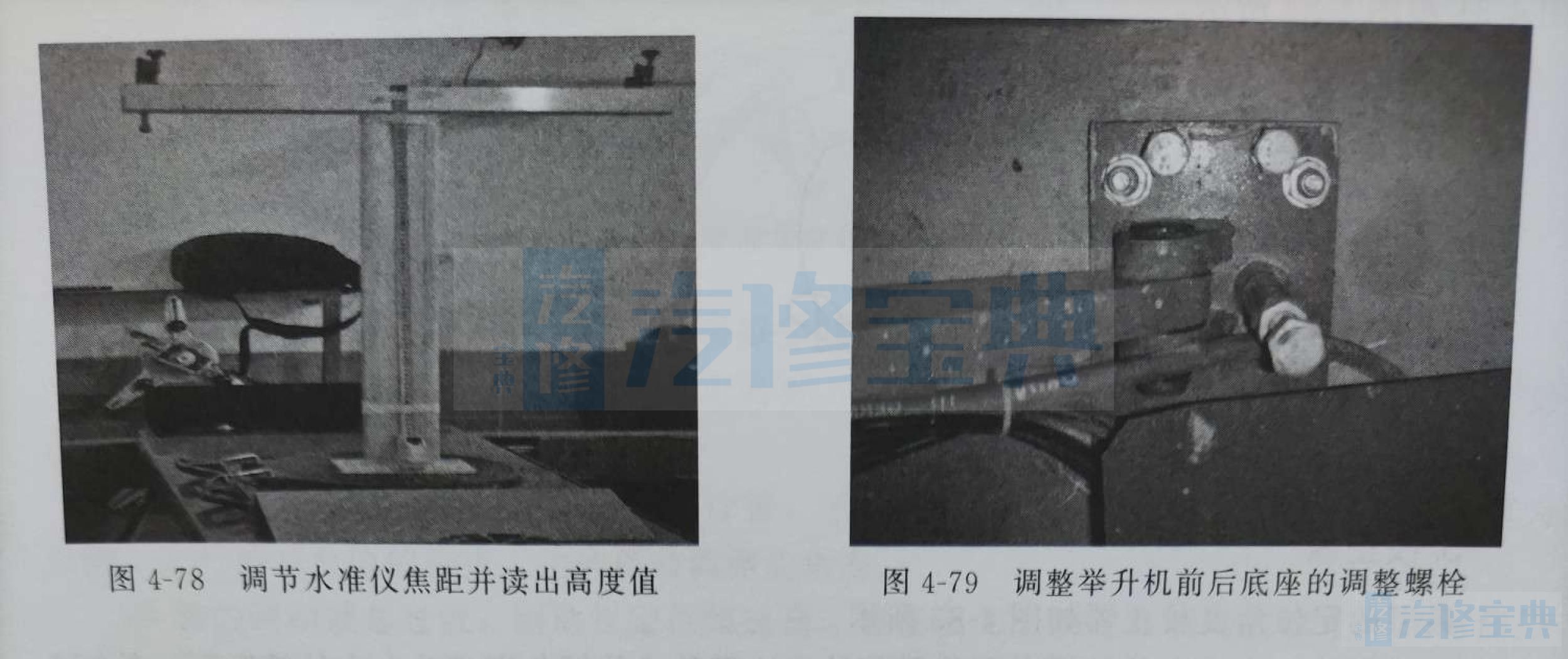
③将标尺分别立于前面的两个转角盘和后面的后滑板上,调节水准仪焦距,读出高度值(图4-78)。
④如果4个读数不同,则调节柱子顶端螺杆,将转角盘中心和后滑板中心调整到同高度。调整好后锁定螺杆上的螺母。
4.剪式举升机水平调整:
将举升机锁止到测量平面。依次把毫米刻度的标尺垂直竖立在转角盘和后滑板上,一共4个点。分别用水准仪测量这4个点的高度值。分别调整举升机前后底座的调整螺栓(图4-79)使标尺在4个点的测量高度值相同。4个点水平调整好之后,锁紧调整螺栓的螺母,使4个点水平高度不再变化。