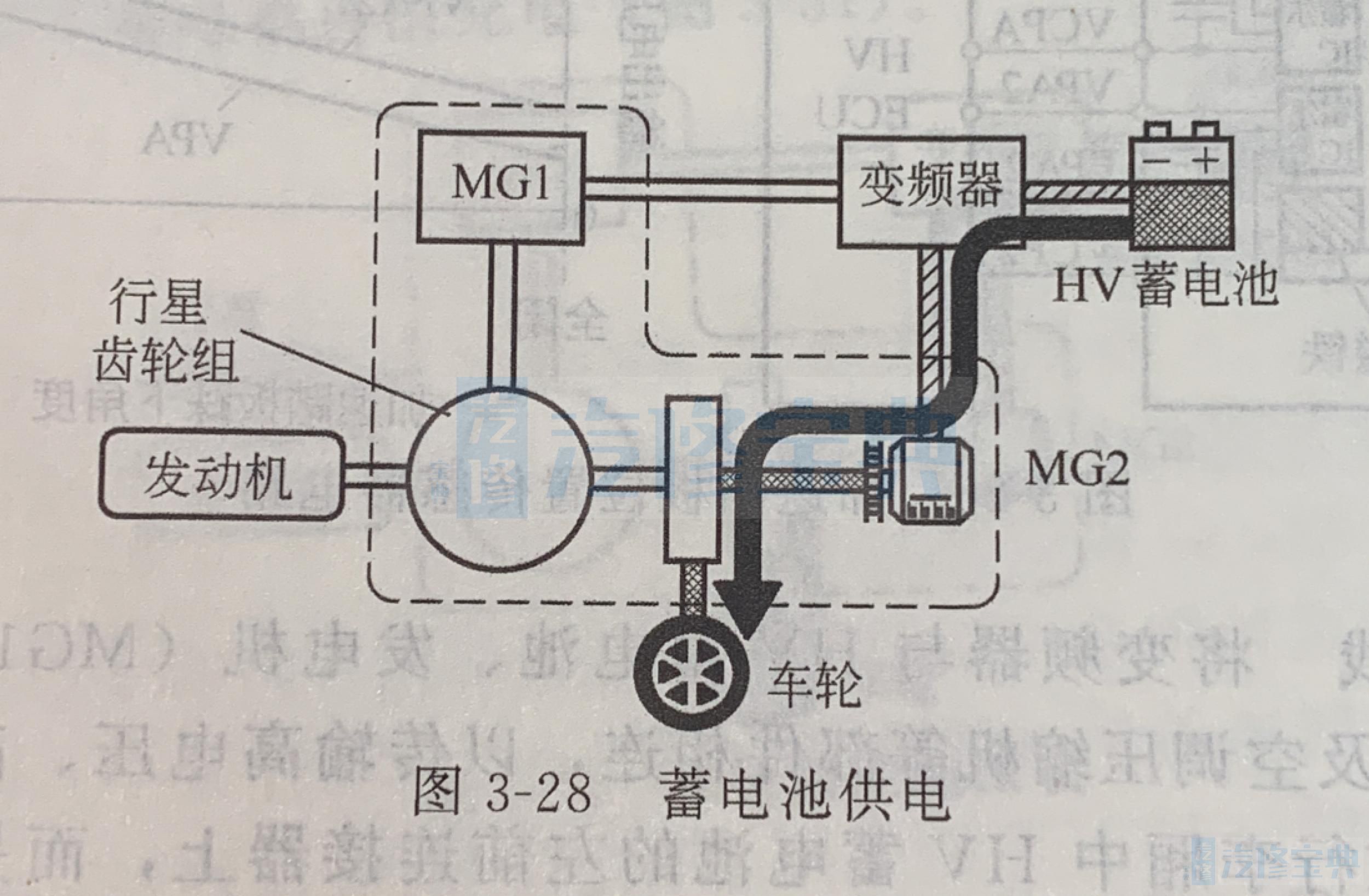
根据行驶条件的不同,汽车在稳定运行过程中,可能处于以下工作状态,以最大限度地适应车辆的行驶状况。 ①电动机(MG2)接收来自HV蓄电池的电能,以驱动车辆(图3-28)。
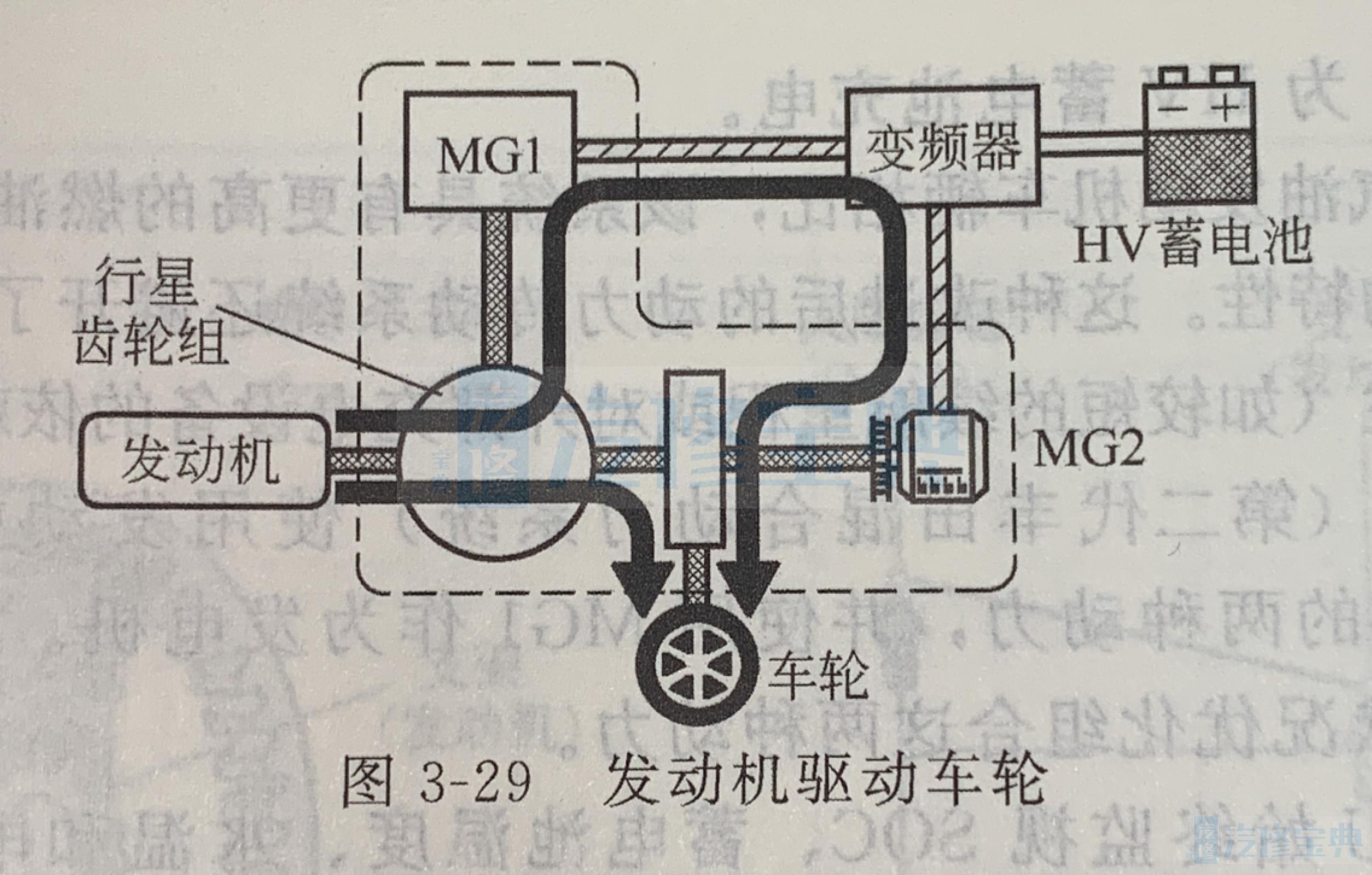
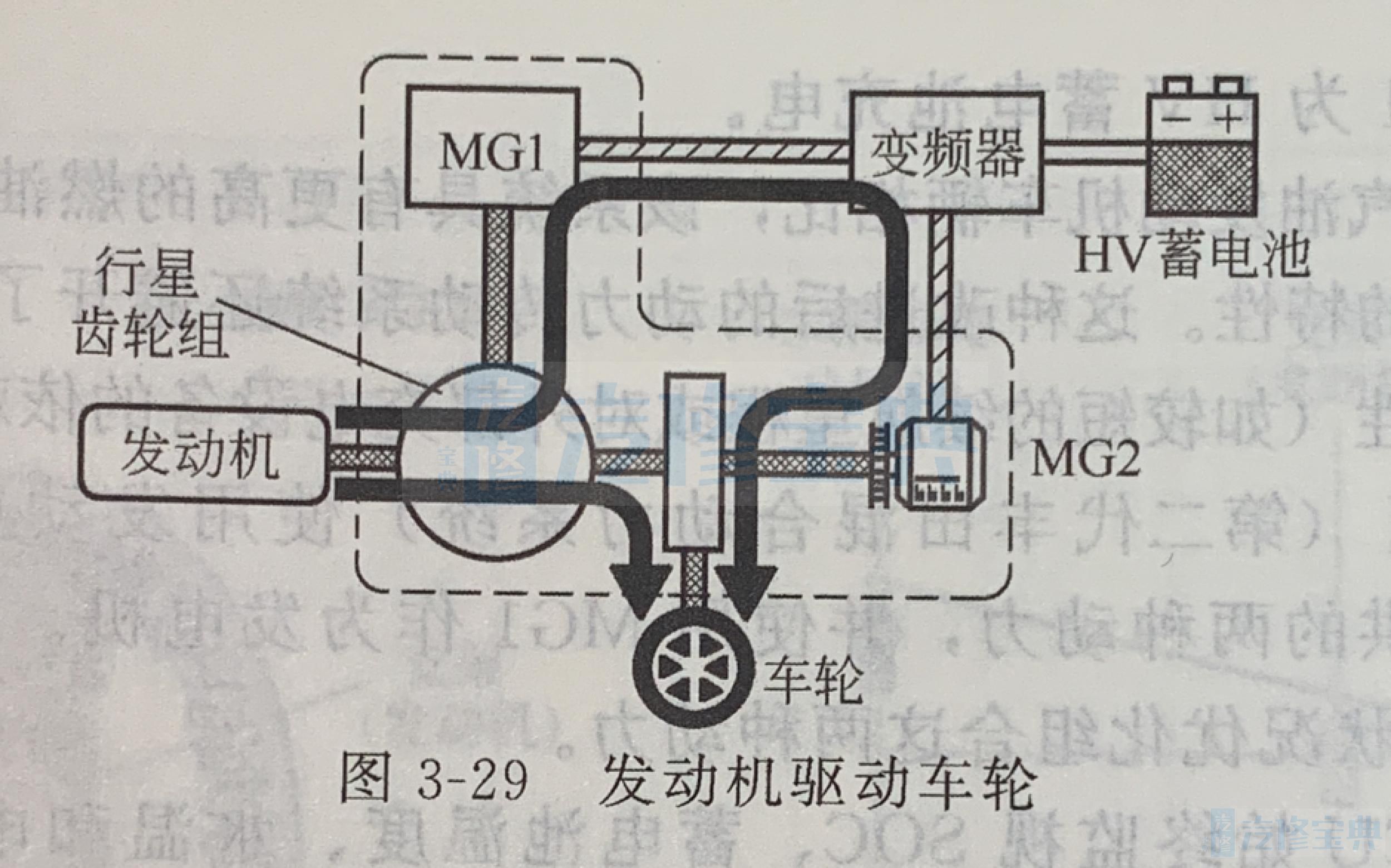
②发动机通过行星齿轮驱动车辆时,发电机(MG1)由发动机通过行星齿轮带动旋转,为MG2提供电能(图3-29)。
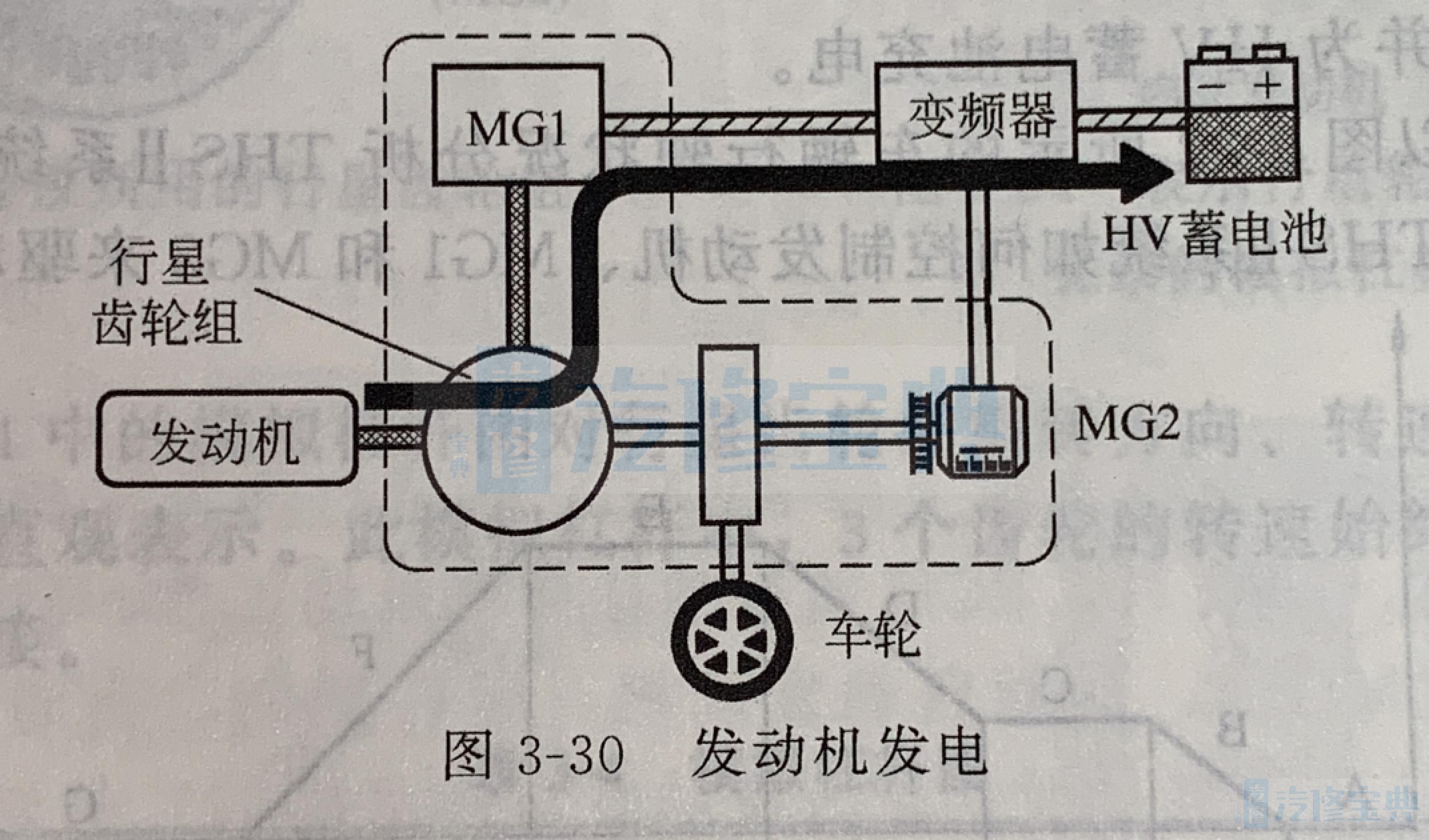
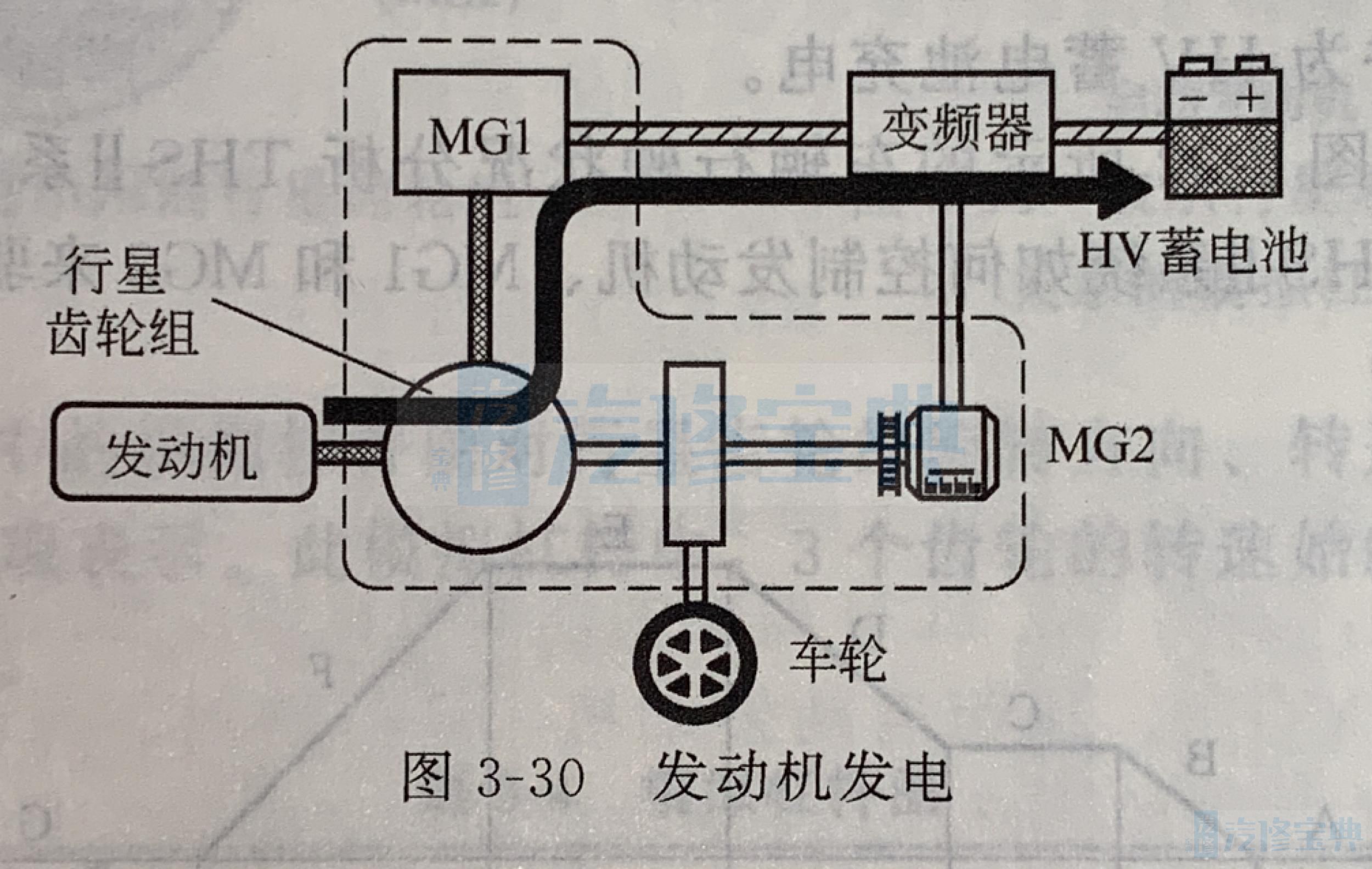
③发电机(MG1)由发动机通过行星齿轮带动旋转,为HV蓄电池充电(图3-30)。
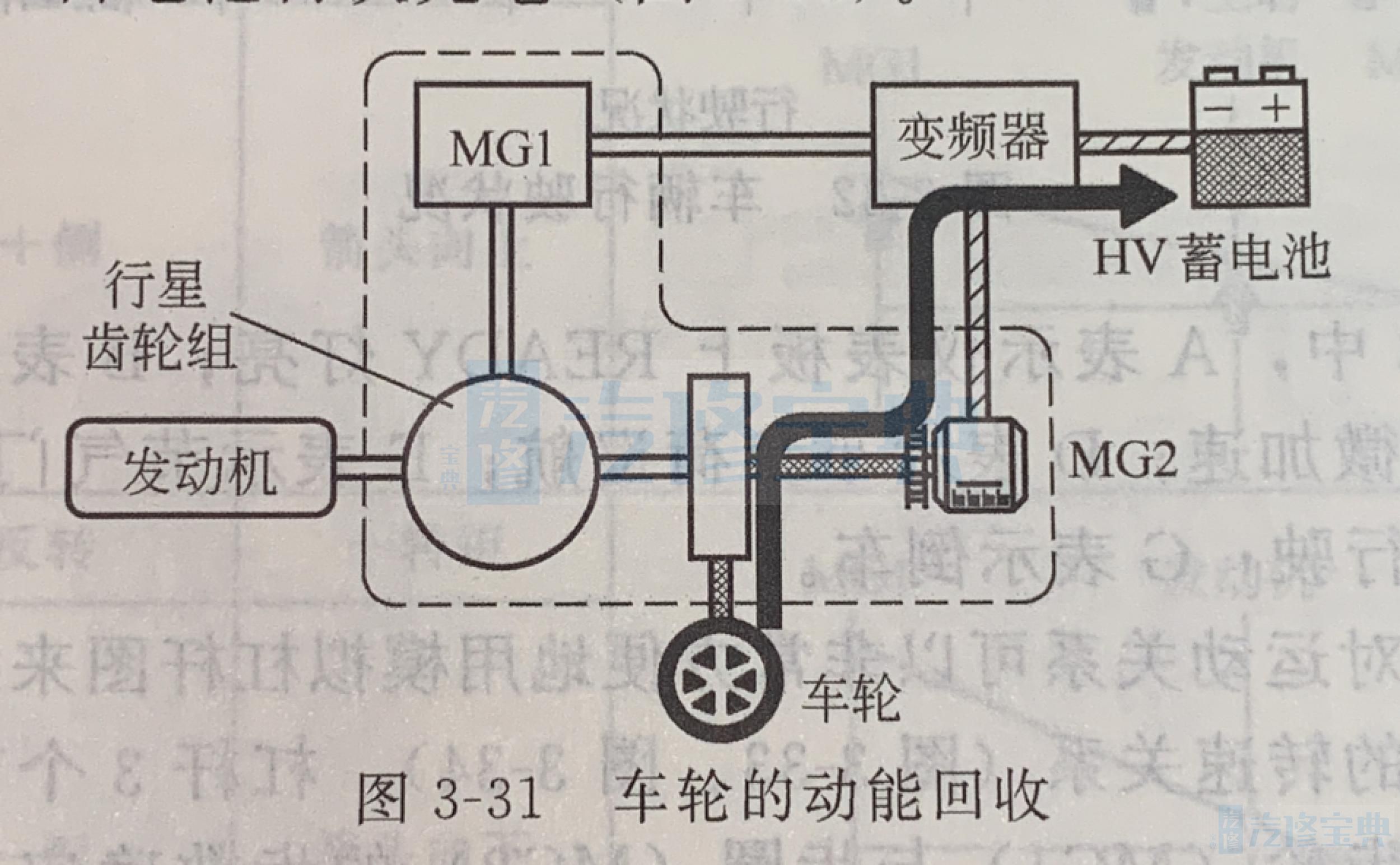
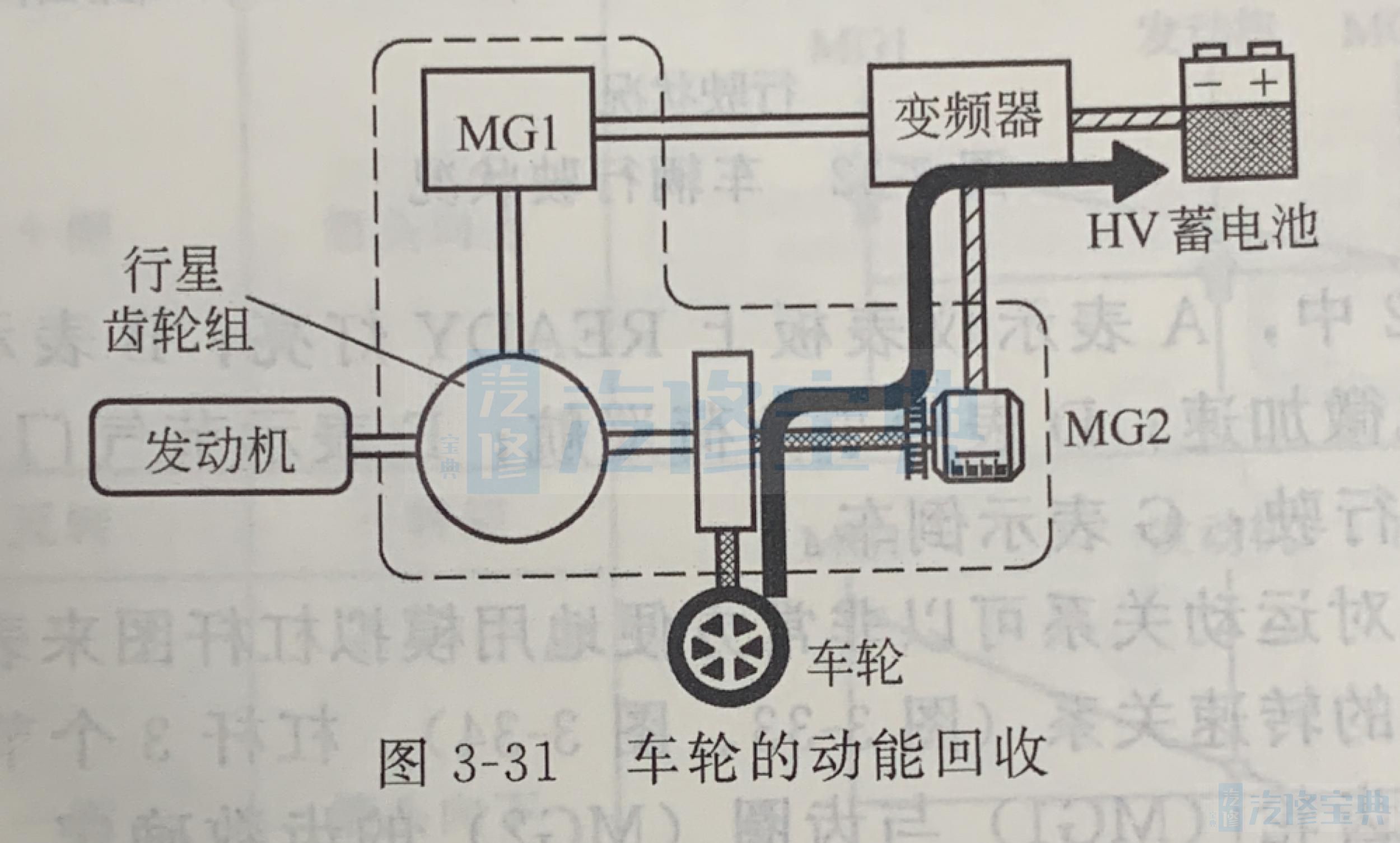
④车辆减速时,车轮的动能被回收并转化为电能,并通过MG2为HV蓄电池再次充电(图3-31)。
HV ECU根据车辆行驶状况在①、②、③、①+②+③或④工作模式间转换。HV蓄电池的SOC(荷电状态)较低时,发动
机带动MG1为HV蓄电池充电。
与传统汽油发动机车辆相比,该系统具有更高的燃油经济性及低尾气排放量的特性。这种改进后的动力传动系统还避开了纯电动汽车的一些局限性(如较短的续航里程或对外部充电设备的依赖性)。
THS-Ⅱ(第二代丰田混合动力系统)使用发动机和电动机(MG2)提供的两种动力,并使用MG1作为发电机。系统根据各种车辆行驶状况优化组合这两种动力。
HV ECU始终监视SOC、蓄电池温度、水温和电载荷状态。
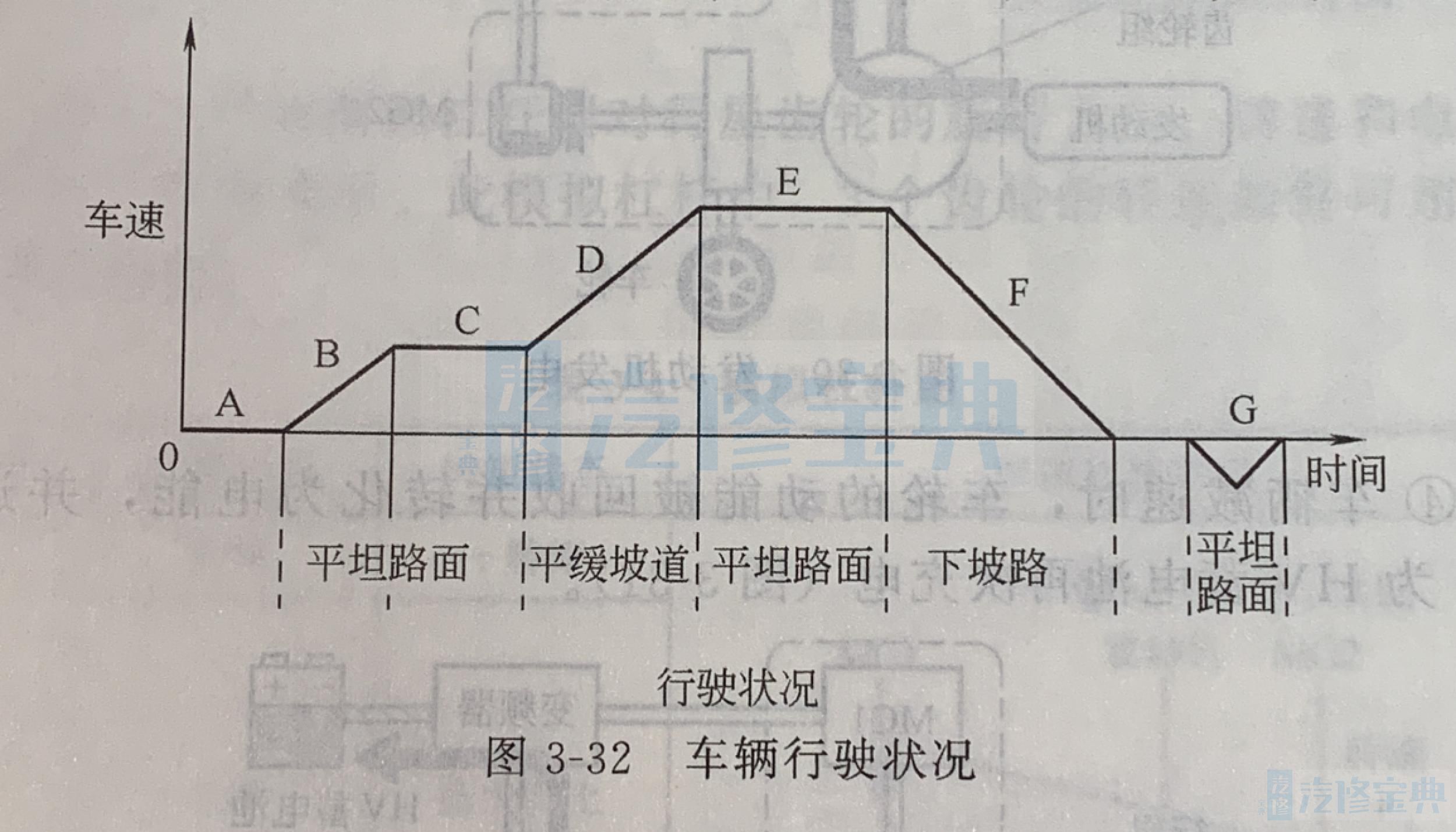
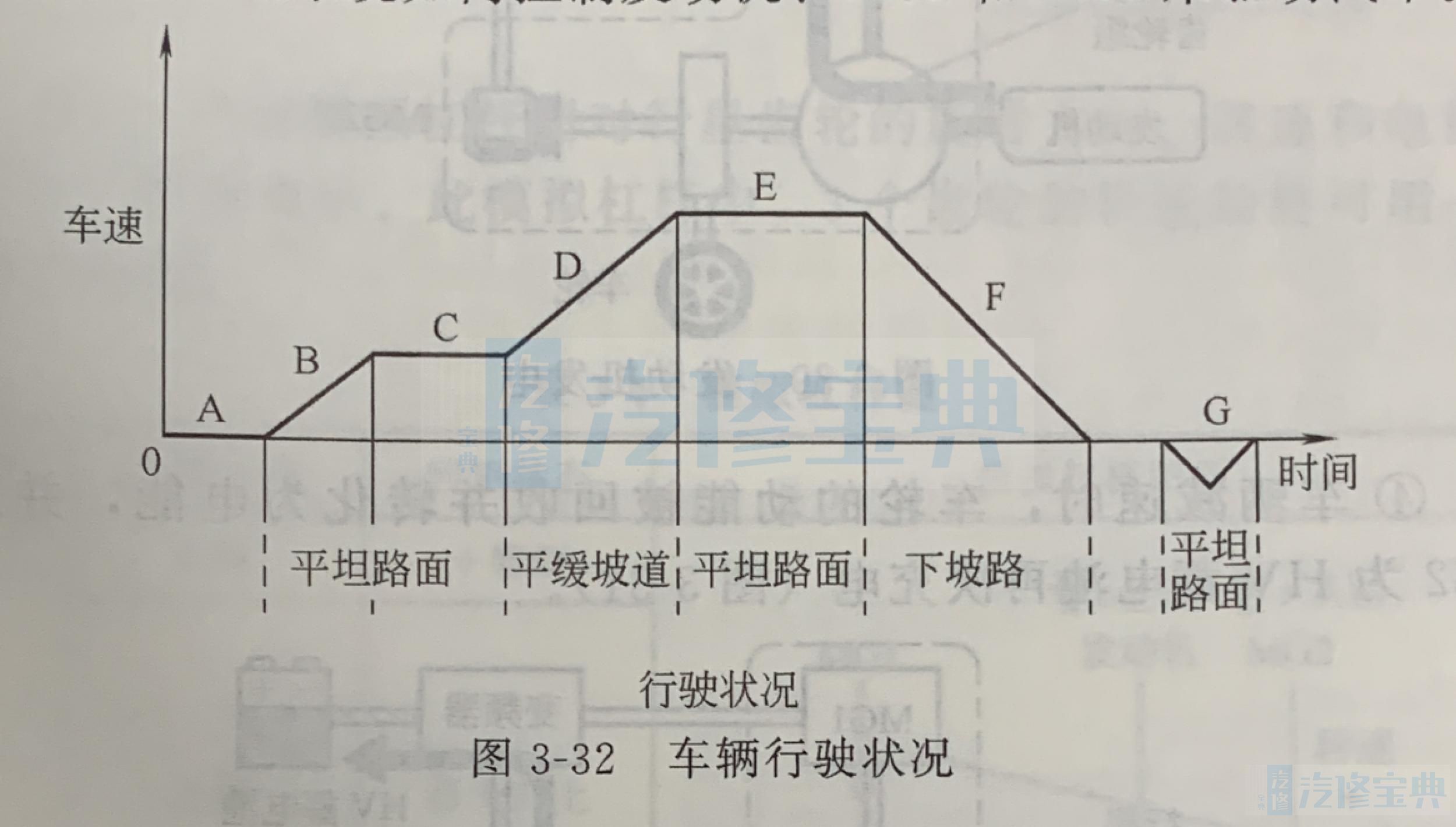
在 READY指示灯亮,车辆处于P挡或车辆倒车时,如果监视项目符合条件, HV ECU发出指令,启动发动机,驱动发电机(MG1),并为HV蓄电池充电下面以图332所示的车辆行驶状况分析THS-Ⅱ系统的工作原理,说明THSⅢ系统如何控制发动机、MG1和MG2来驱动汽车。
图3-32中,A表示仪表板上 READY灯亮;B表示启动;C表示发动机微加速;D表示小负荷巡航;E表示节气门全开加速;
F表示减速行驶;G表示倒车。
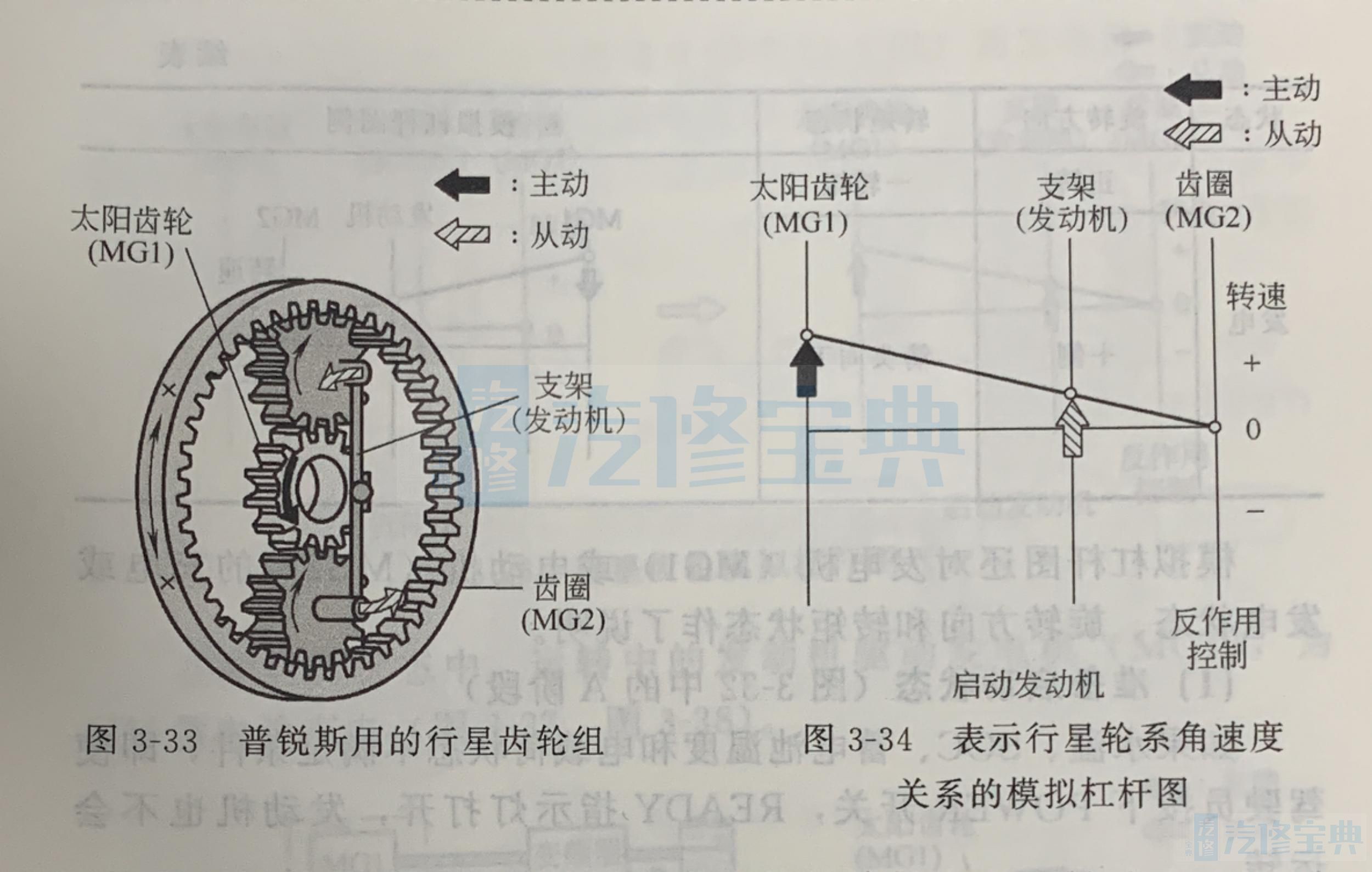
根据相对运动关系可以非常方便地用模拟杠杆图来表示行星齿轮组各部件的转速关系(图3-33、图3-34)。杠杆3个节点的相对位置由太阳齿轮(MG1)与齿圈(MG2)的齿数确定,相对于水平基准位置,同侧表示运转方向相同,异侧表示运转方向相反,相对于基准位置的高度(垂直位移)相似于转速。
③发电机(MG1)由发动机通过行星齿轮带动旋转,为HV蓄电池充电(图3-30)。
④车辆减速时,车轮的动能被回收并转化为电能,并通过MG2为HV蓄电池再次充电(图3-31)。
HV ECU根据车辆行驶状况在①、②、③、①+②+③或④工作模式间转换。HV蓄电池的SOC(荷电状态)较低时,发动
机带动MG1为HV蓄电池充电。
与传统汽油发动机车辆相比,该系统具有更高的燃油经济性及低尾气排放量的特性。这种改进后的动力传动系统还避开了纯电动汽车的一些局限性(如较短的续航里程或对外部充电设备的依赖性)。
THS-Ⅱ(第二代丰田混合动力系统)使用发动机和电动机(MG2)提供的两种动力,并使用MG1作为发电机。系统根据各种车辆行驶状况优化组合这两种动力。
HV ECU始终监视SOC、蓄电池温度、水温和电载荷状态。
在 READY指示灯亮,车辆处于P挡或车辆倒车时,如果监视项目符合条件, HV ECU发出指令,启动发动机,驱动发电机(MG1),并为HV蓄电池充电。
下面以图3-32所示的车辆行驶状况分析THSⅡ系统的工作原理,说明THS-Ⅱ系统如何控制发动机、MG1和MG来驱动汽车。
图3-32中,A表示仪表板上 READY灯亮;B表示启动;C表示发动机微加速;D表示小负荷巡航;E表示节气门全开加速F表示减速行驶;G表示倒车。
根据相对运动关系可以非常方便地用模拟杠杆图来表示行星齿轮组各部件的转速关系(图3-33、图3-34)。杠杆3个节点的相对位置由太阳齿轮(MG1)与齿圈(MG2)的齿数确定,相对于水平基准位置,同侧表示运转方向相同,异侧表示运转方向相反,相对于基准位置的高度(垂直位移)相似于转速。
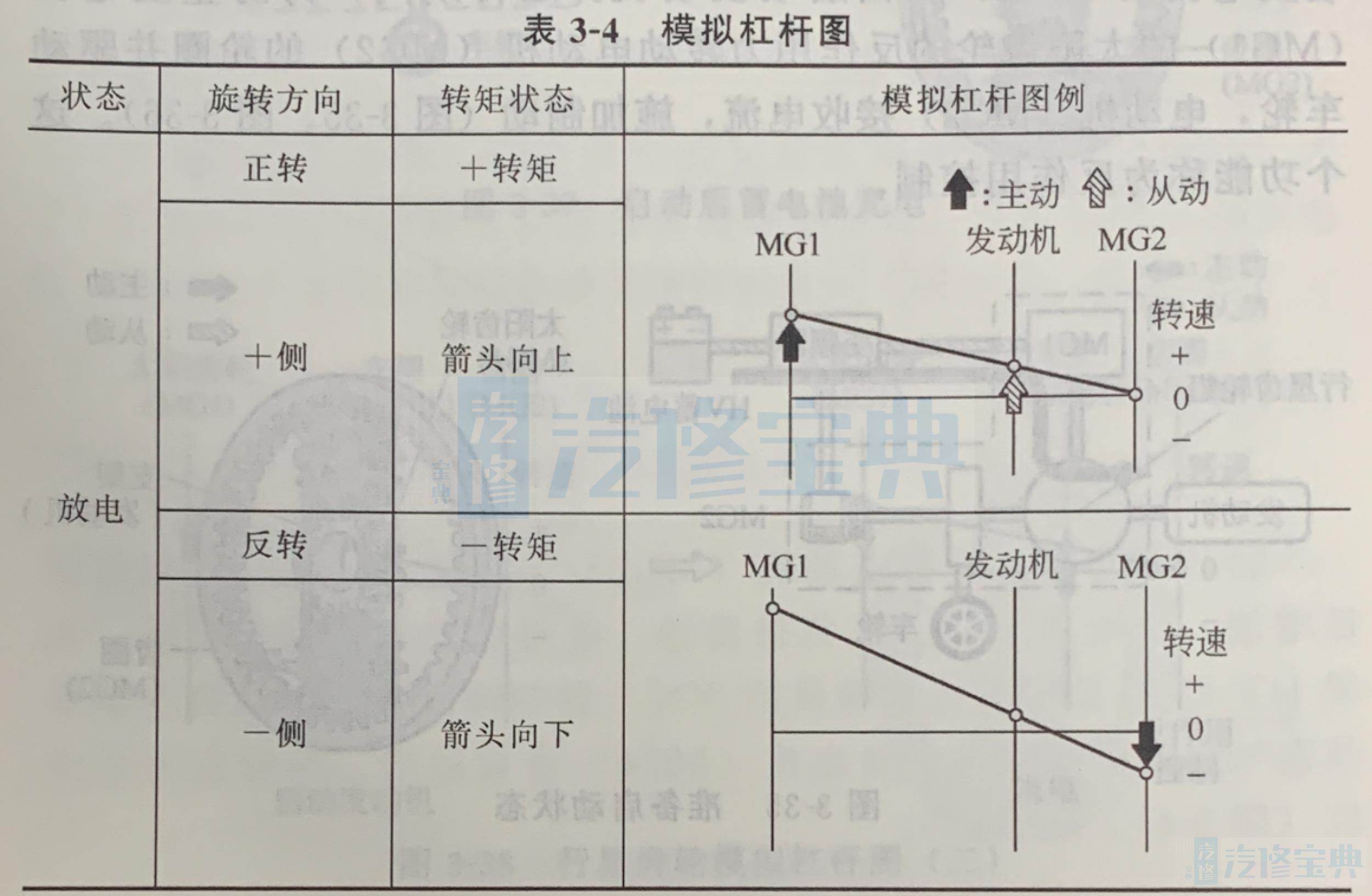
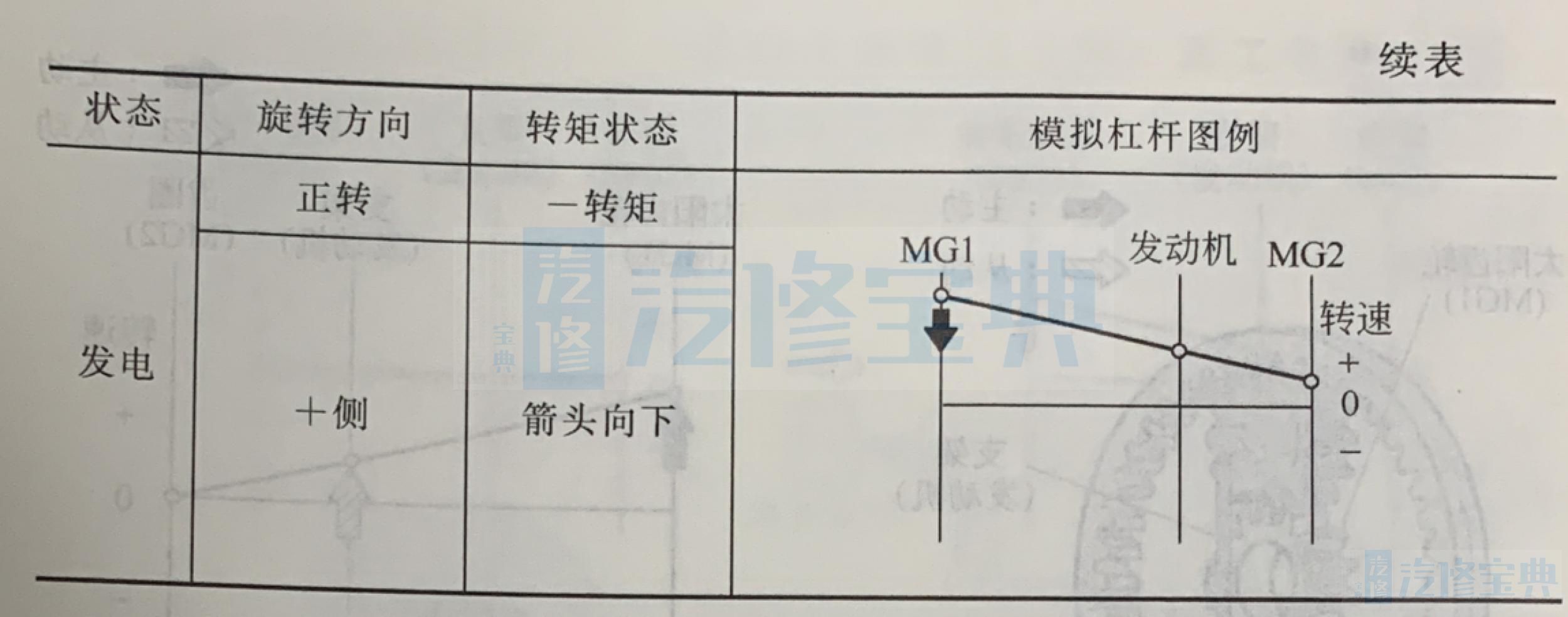
表3-4中的模拟杠杆图对行星齿轮的旋转方向、转速和电源平衡进行了直观表示。此模拟杠杆中,3个齿轮的转速始终可用一条直线来连接。
模拟杠杆图还对发电机(MG1)或电动机(MG2)的充电或发电状态、旋转方向和转矩状态作了说明。
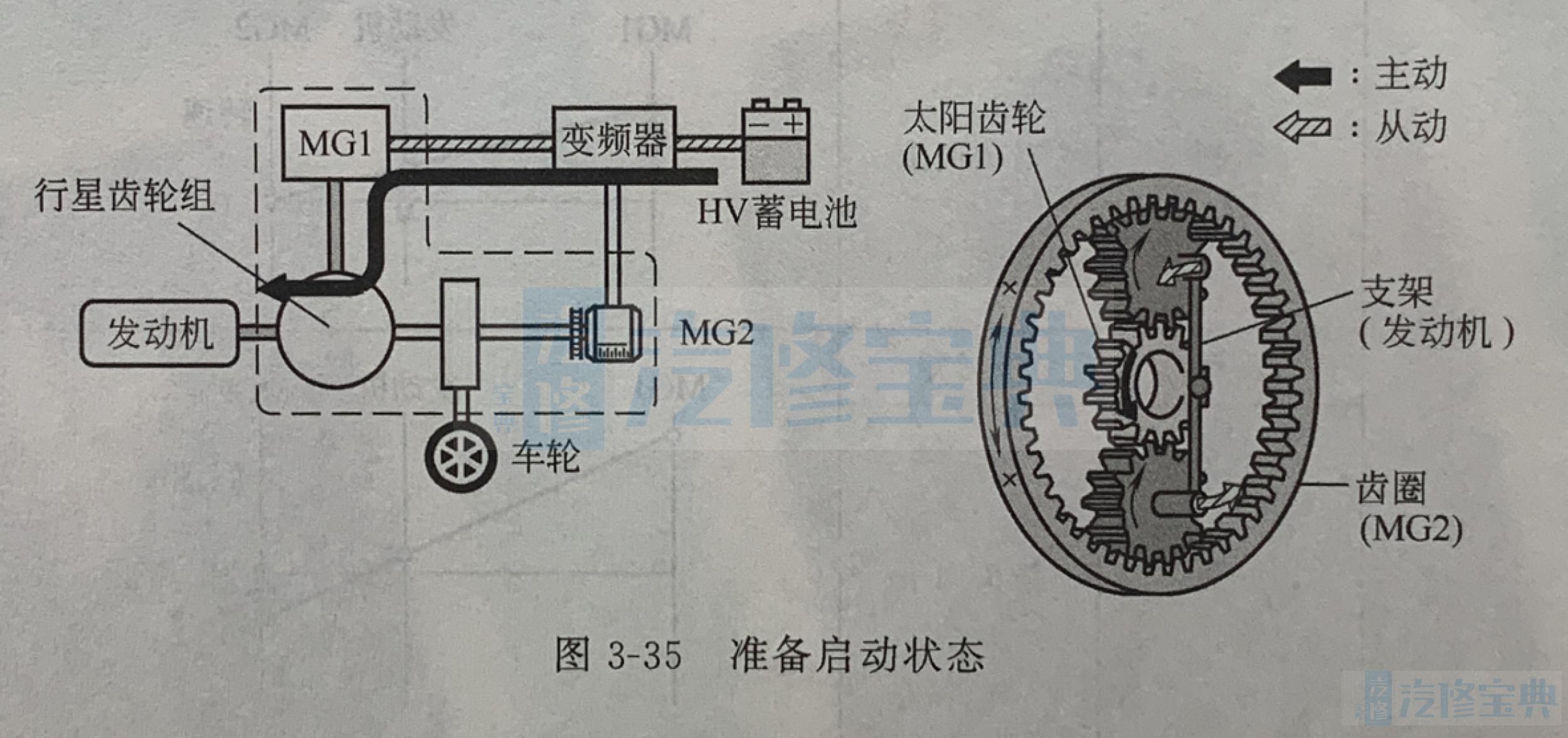
(1)准备启动状态(图3-32中的A阶段)如果水温、SOC、蓄电池温度和电载荷状态不满足条件,即使驾驶员按下 POWER开关, READY指示灯打开,发动机也不会运转。
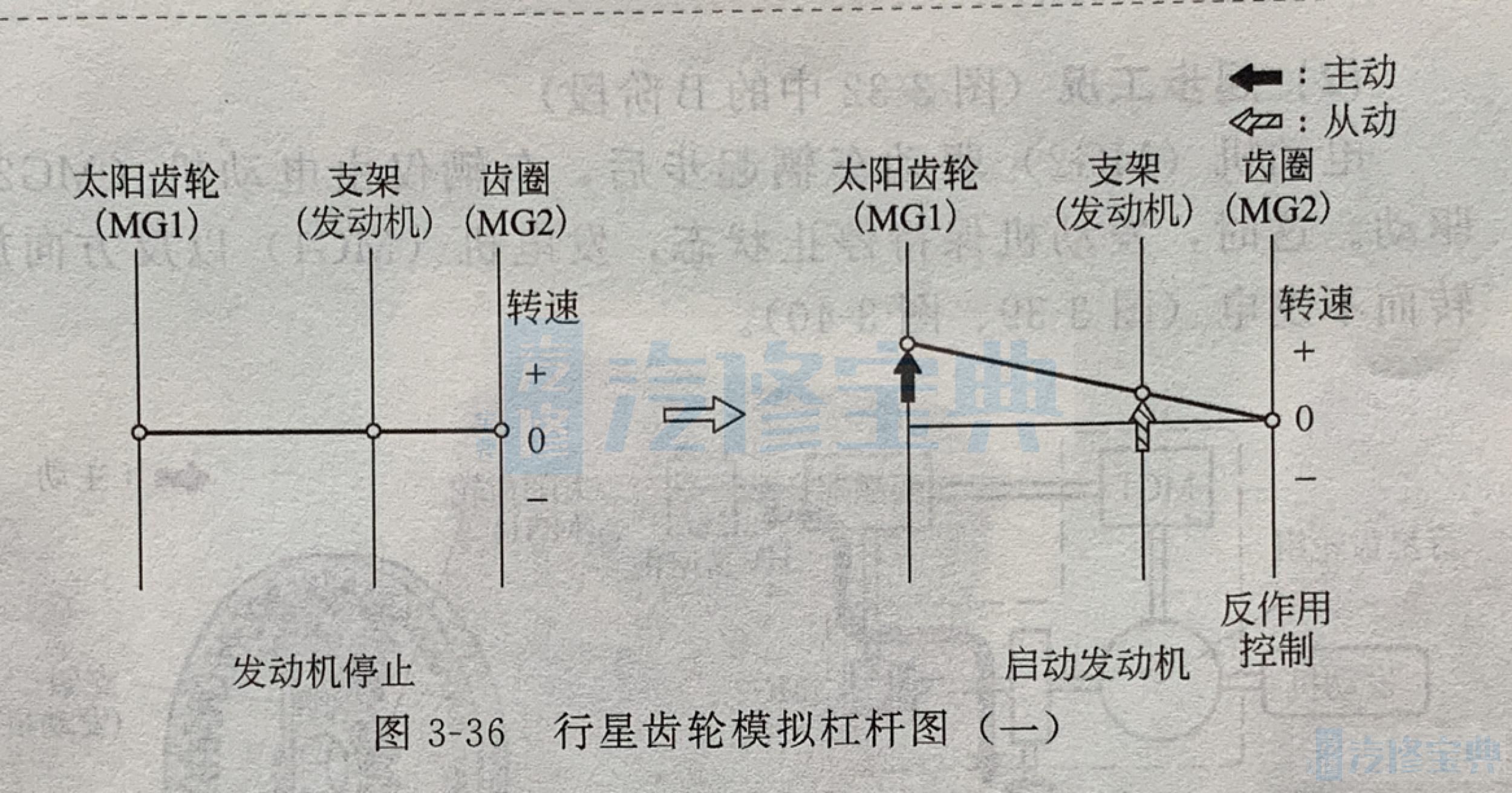
启动发动机:仪表盘上的 READY指示灯亮、车辆处于P挡或者倒挡时,如果 HV ECU监视的任何项目均正常, HV ECU启动发电机(MG1),从而启动发动机。运行期间,为防止发电机(MG1)的太阳齿轮的反作用力转动电动机(MG2)的轮圈并驱动车轮,电动机(MG2)接收电流,施加制动(图3-35、图3-36)。这个功能称为反作用控制。
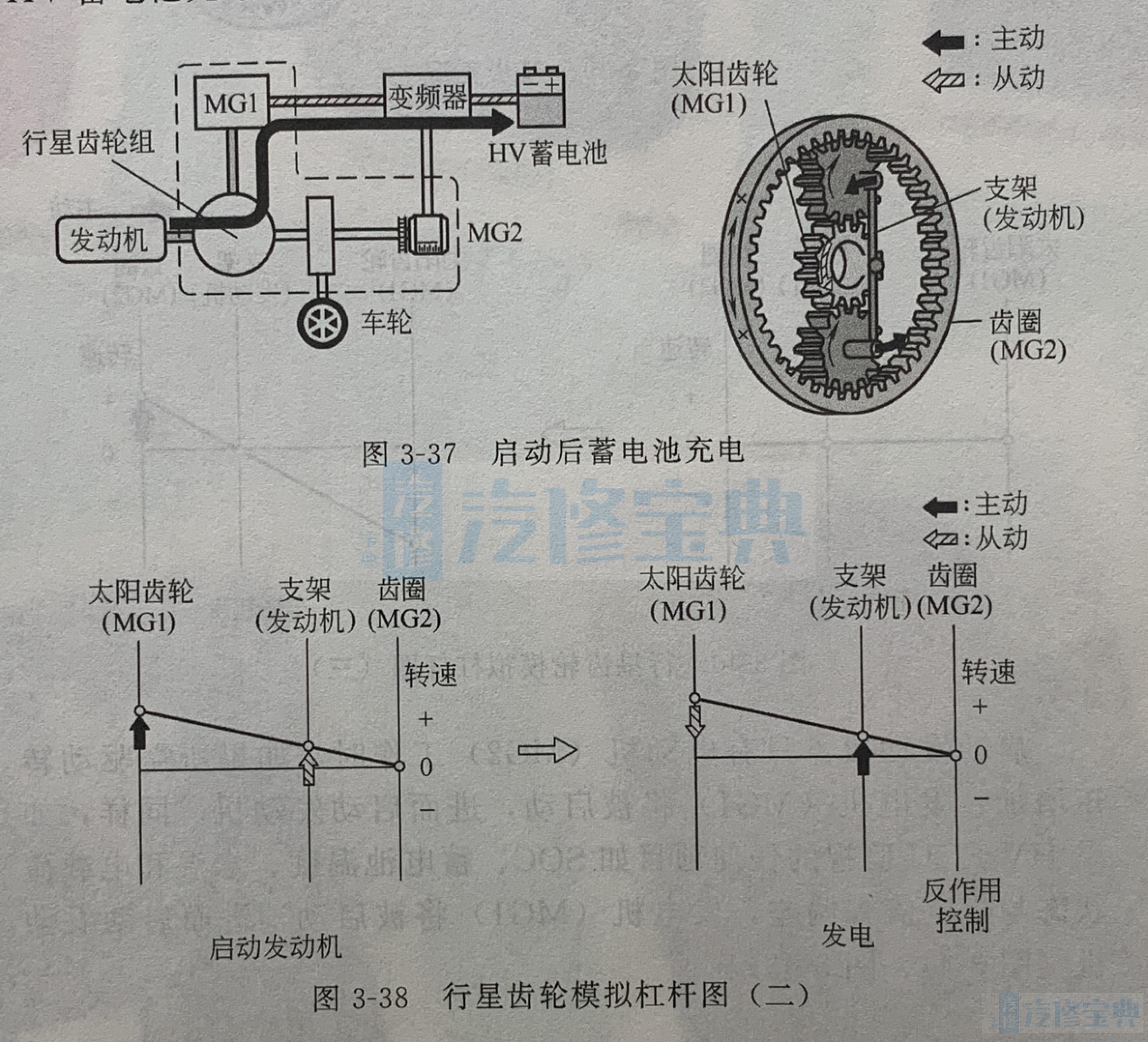
在随后的状态中,运转中的发动机驱动发电机(MG1),为HV蓄电池充电(图3-37、图3-38)。
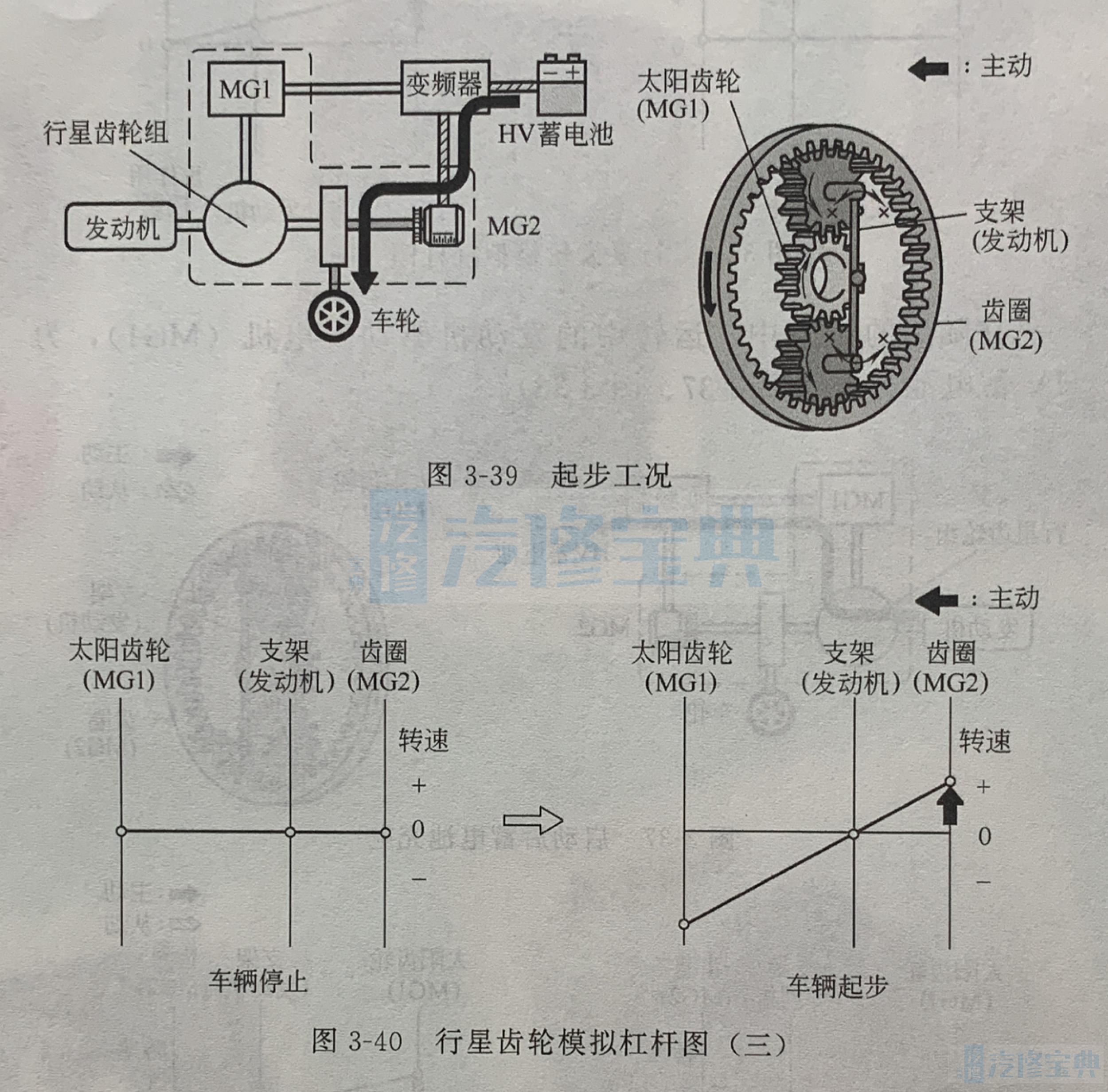
(2)起步工况(图3-32中的B阶段)电动机(MG2)驱动车辆起步后,车辆仅由电动机(MG2)驱动。这时,发动机保持停止状态,发电机(MG1)以反方向旋转而不发电(图3-39、图3-40)。
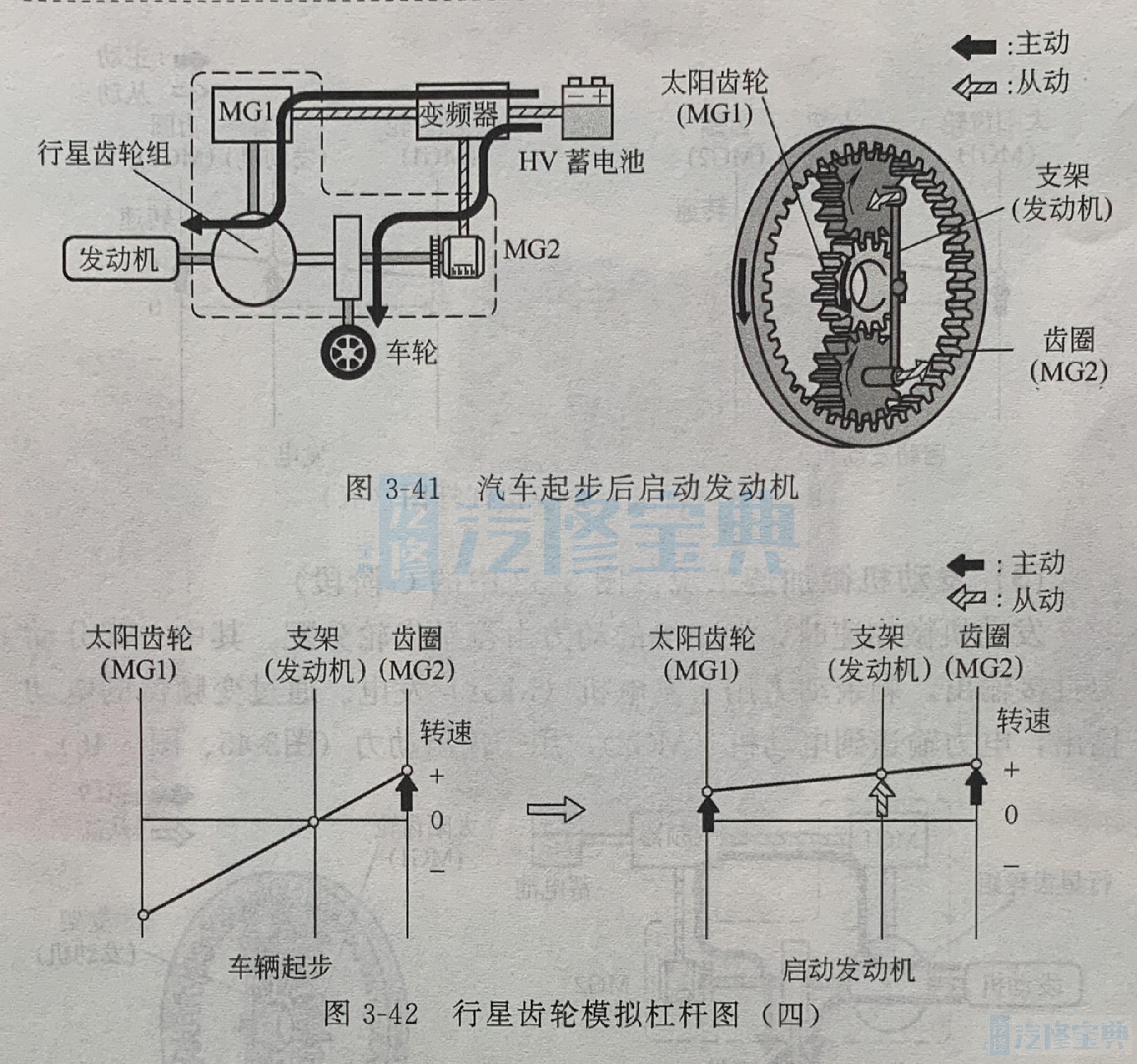
启动发动机:只有电动机(MG2)工作时,如果所需驱动转矩增加,发电机(MG1)将被启动,进而启动发动机。同样,如果HV ECU监视的任何项目如SOC、蓄电池温度、水温和电载荷状态与规定值有偏差,发电机(MG1)将被启动,进而启动发动机(图3-41、图3-42)。
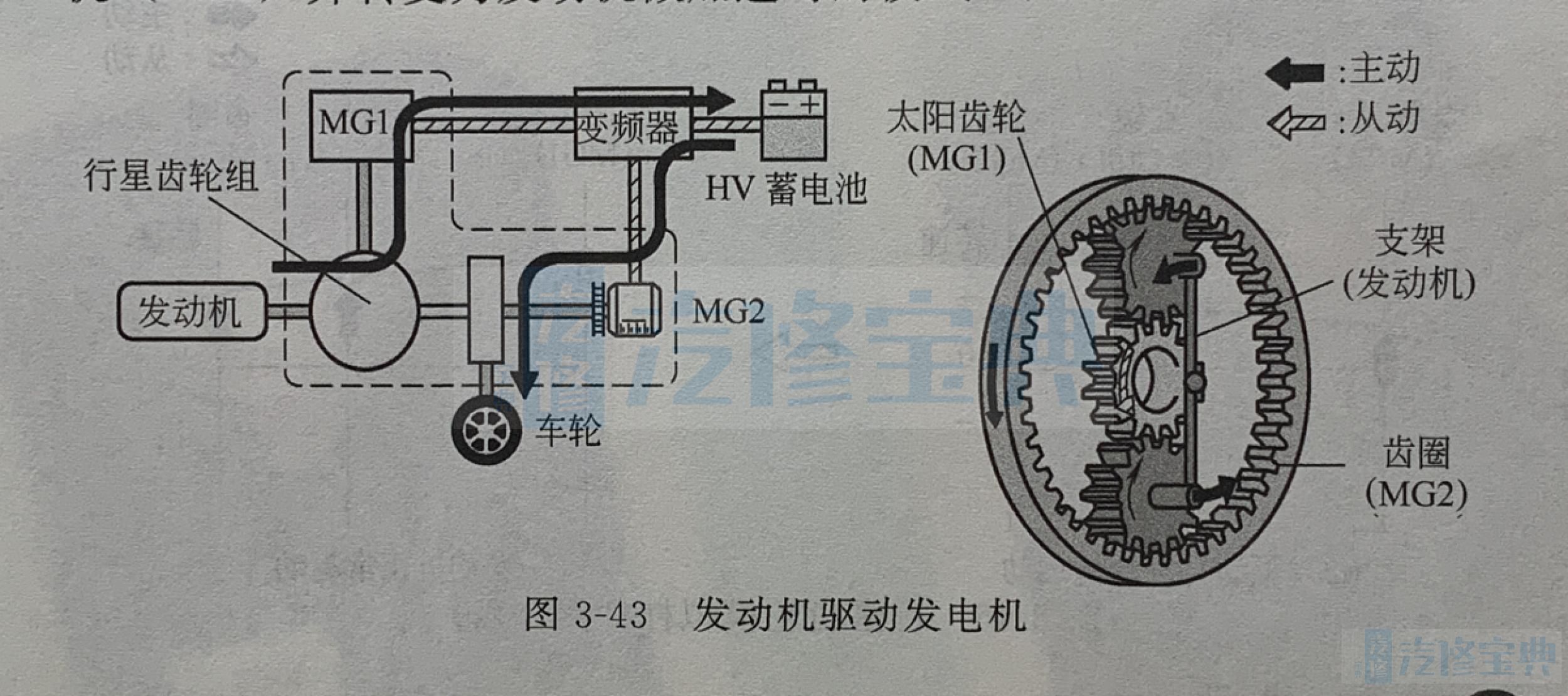
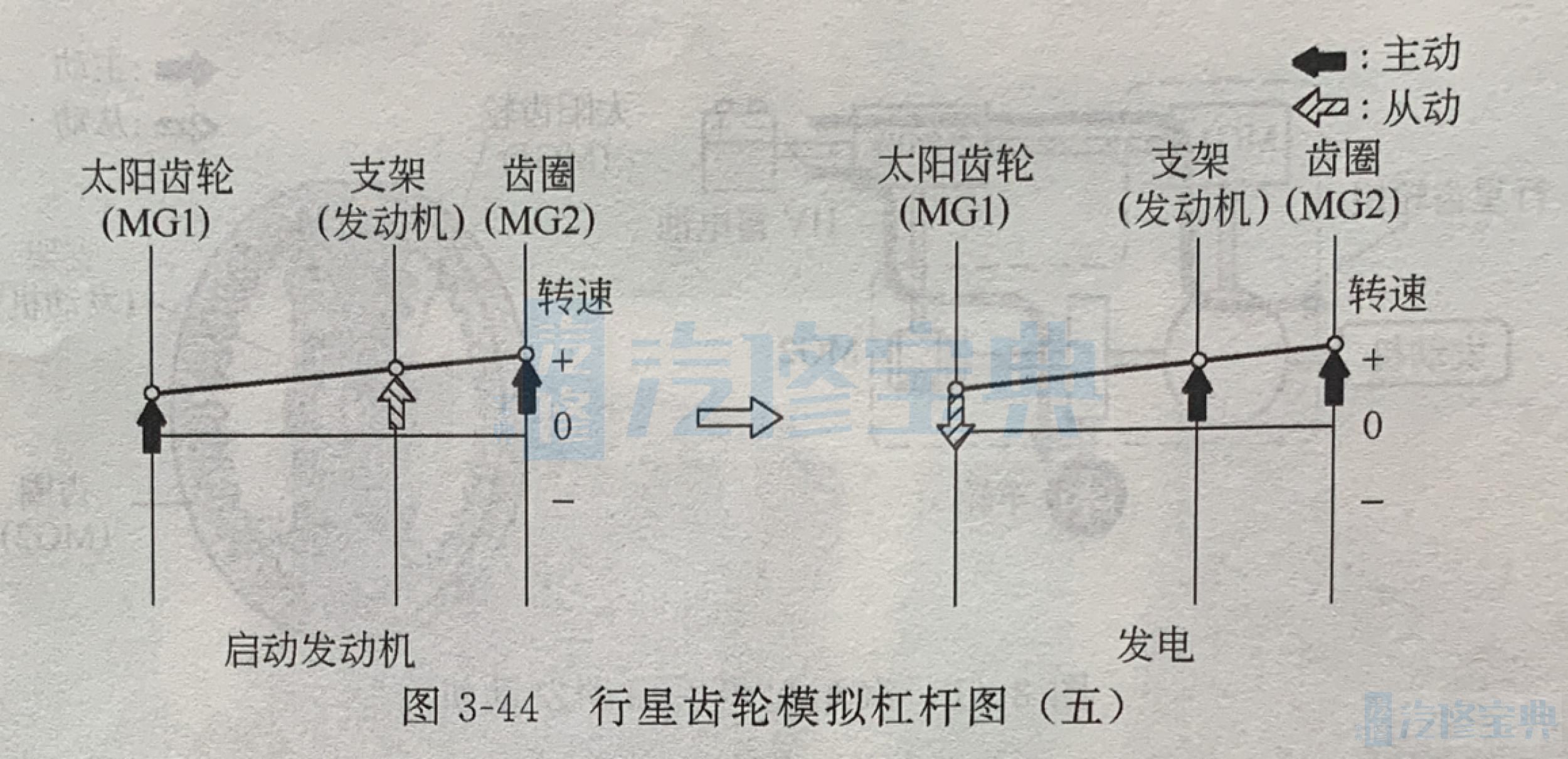
在随后的状态中,已经启动的发动机将使发电机(MG1)为HV蓄电池充电。如果需要增加所需驱动转矩,发动机将启动发电机(MG1)并转变为发动机微加速时的模式(图3-43、图3-44)。
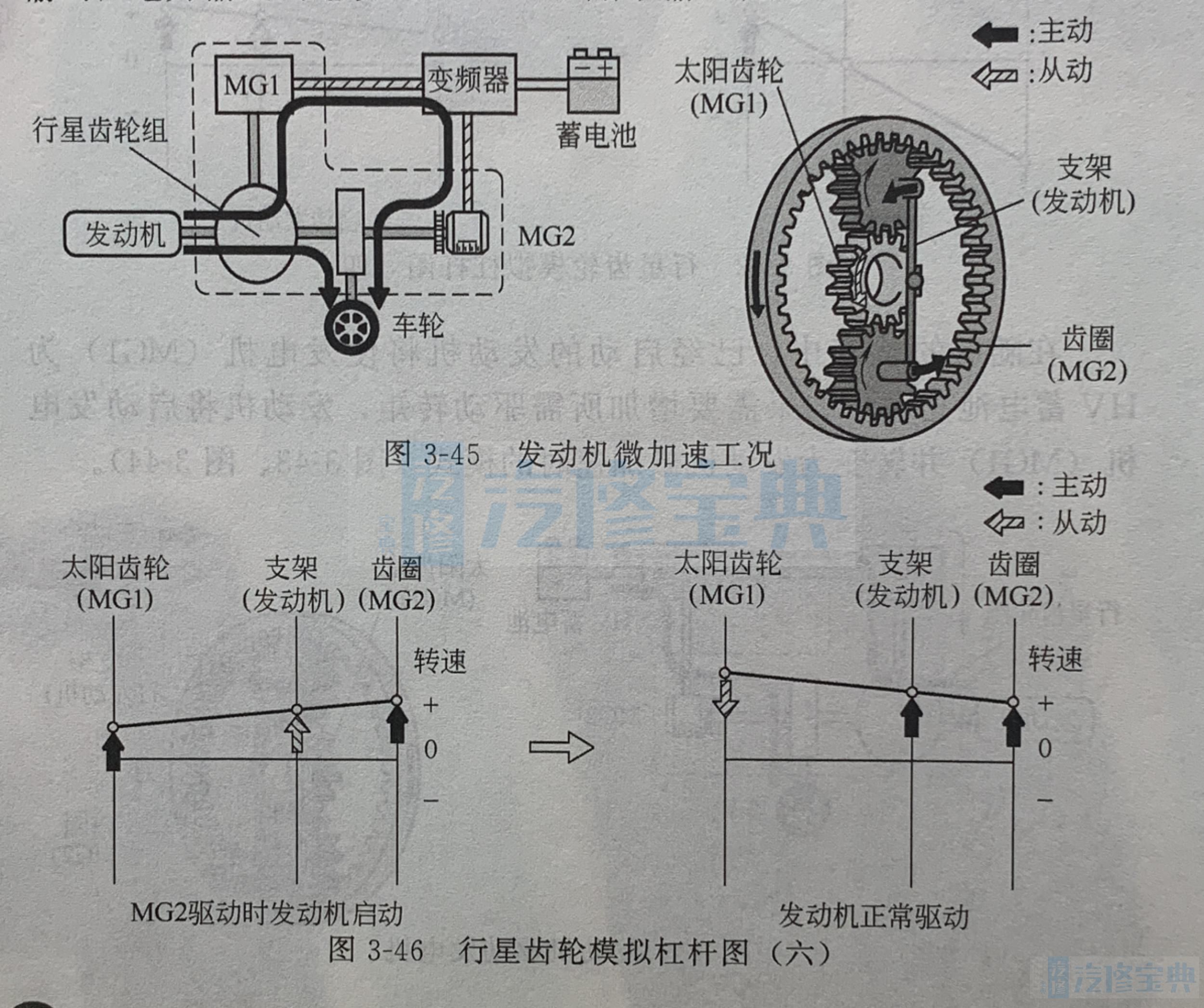
(3)发动机微加速工况(图3-32中的C阶段)发动机微加速时,发动机的动力由行星齿轮分配。其中一部分动力直接输出,剩余动力用于发电机(MG1)发电。通过变频器的电动输出,电力输送到电动机(MG2),用于输出动力(图3-45、图3-46)。
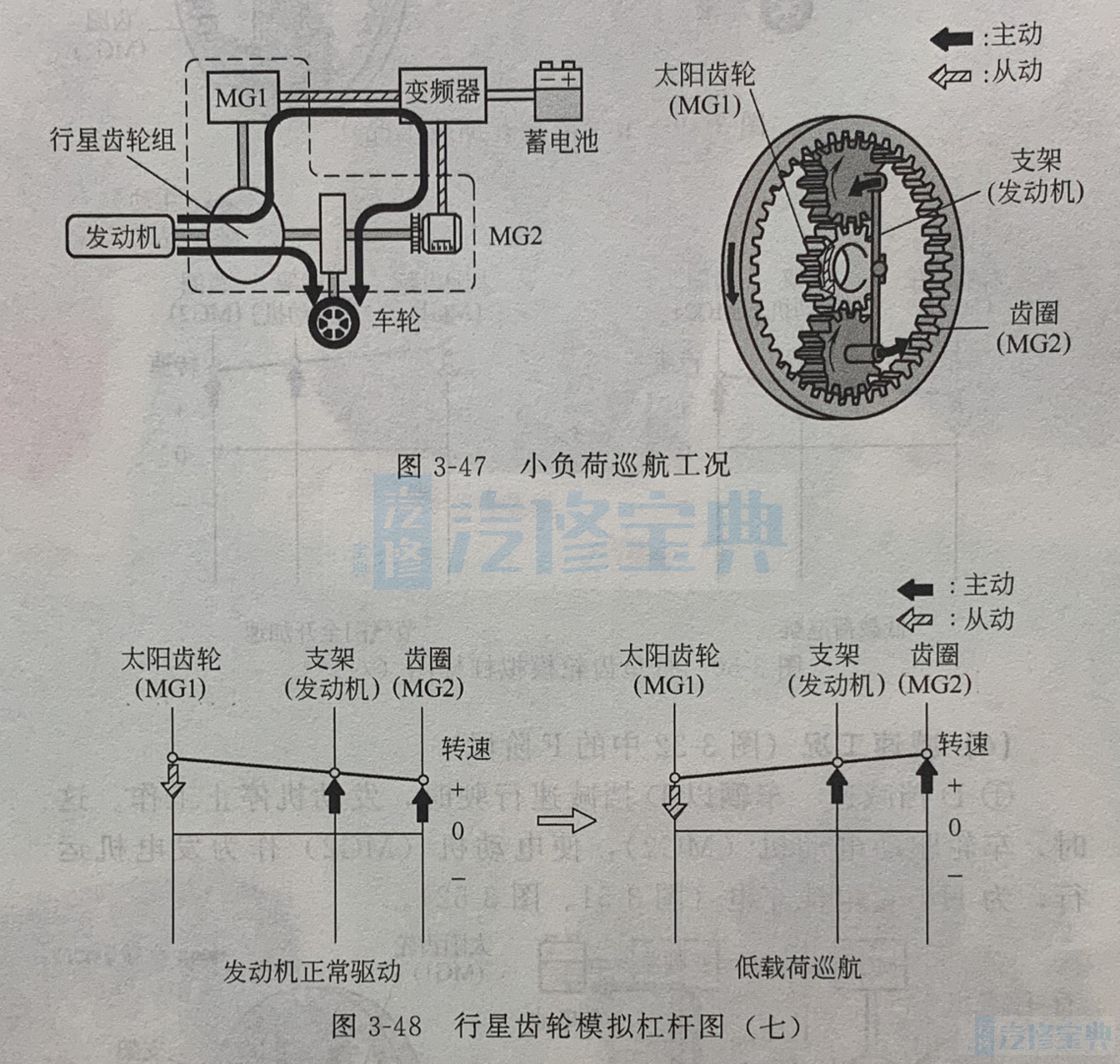
(4)小负荷巡航工况(图3-32中的D阶段)车辆以小负荷巡航时,发动机的动力由行星齿轮分配。其中部分动力直接输出,剩余动力用于发电机(MG1)发电。通过变频器的电动传输,电力输送到电动机(MG2)用于输出动力(图3-47、图3-48)。
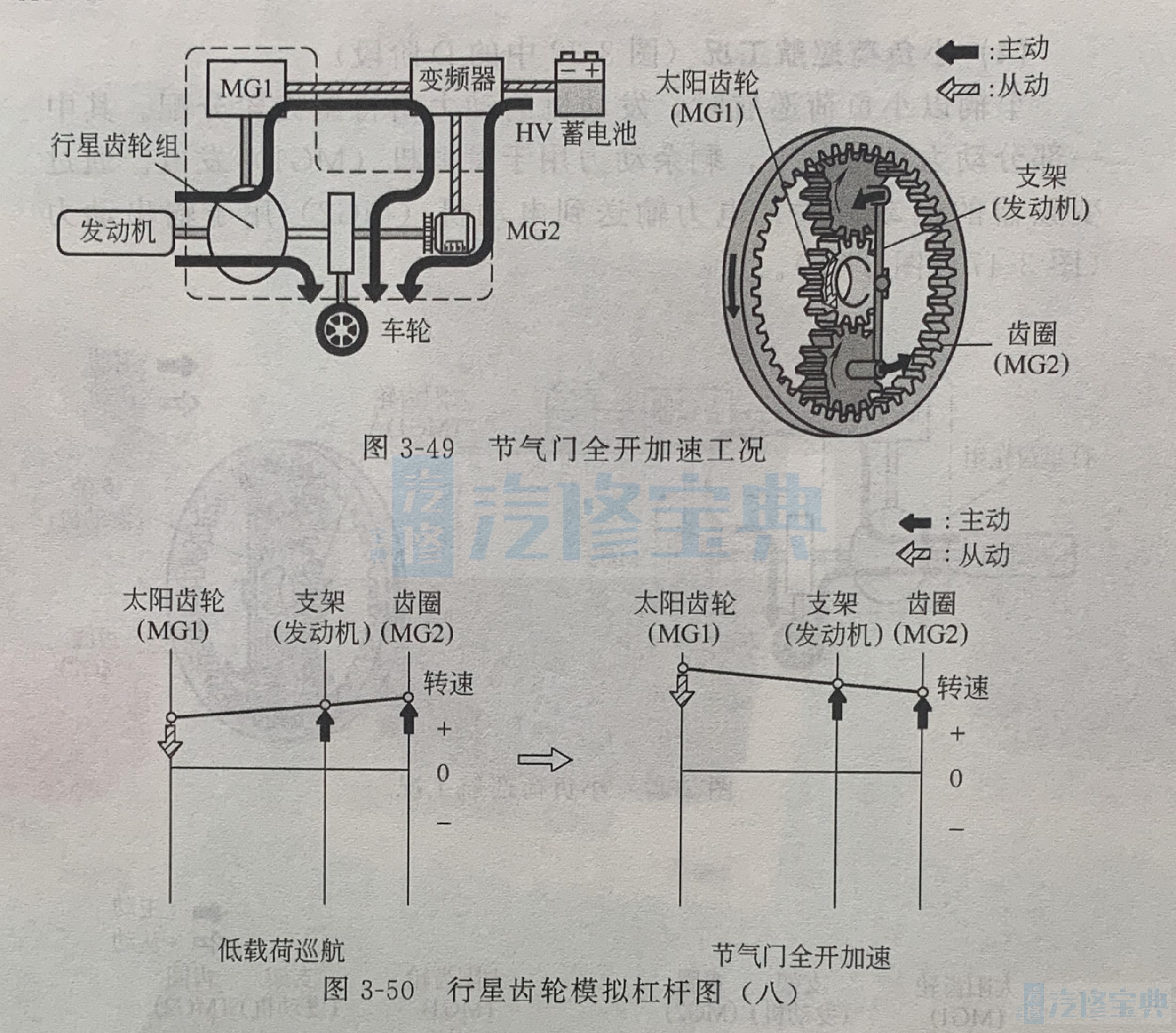
(5)节气门全开加速工况(图3-32中的E阶段)车辆从低载荷巡航转换为节气门全开加速模式时,系统将在保持电动机(MG2)动力的基础上,增加HV蓄电池的电动力(图3-49、图3-50)。
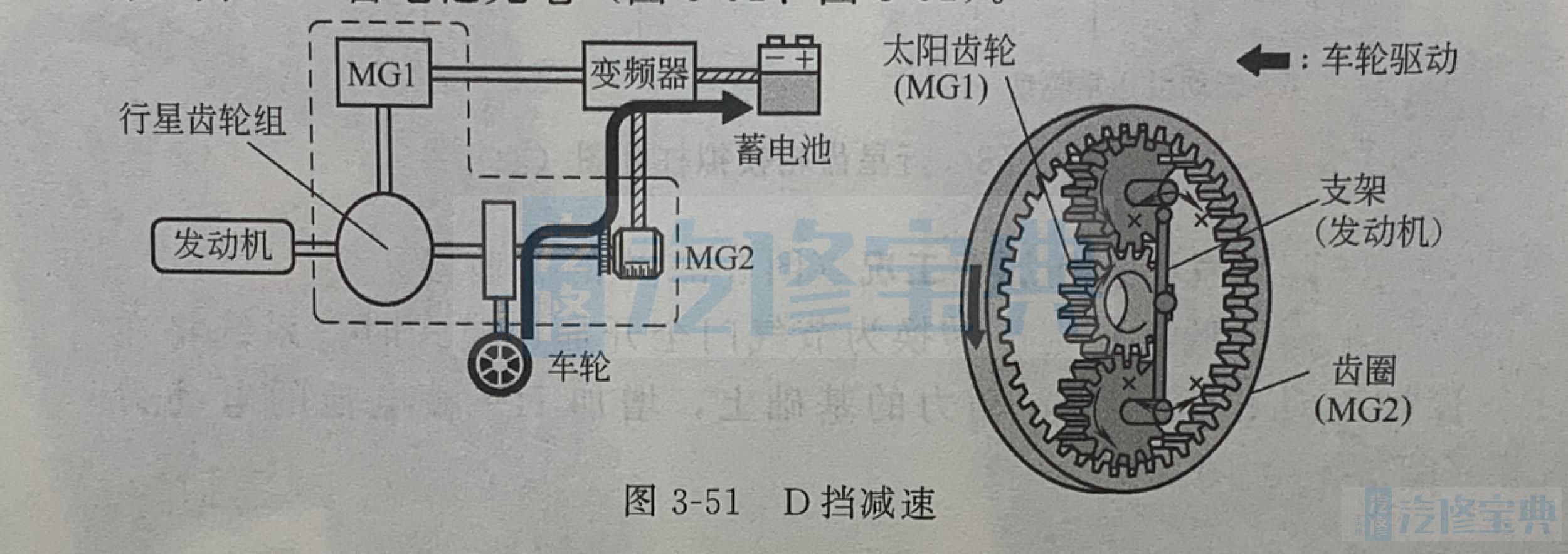
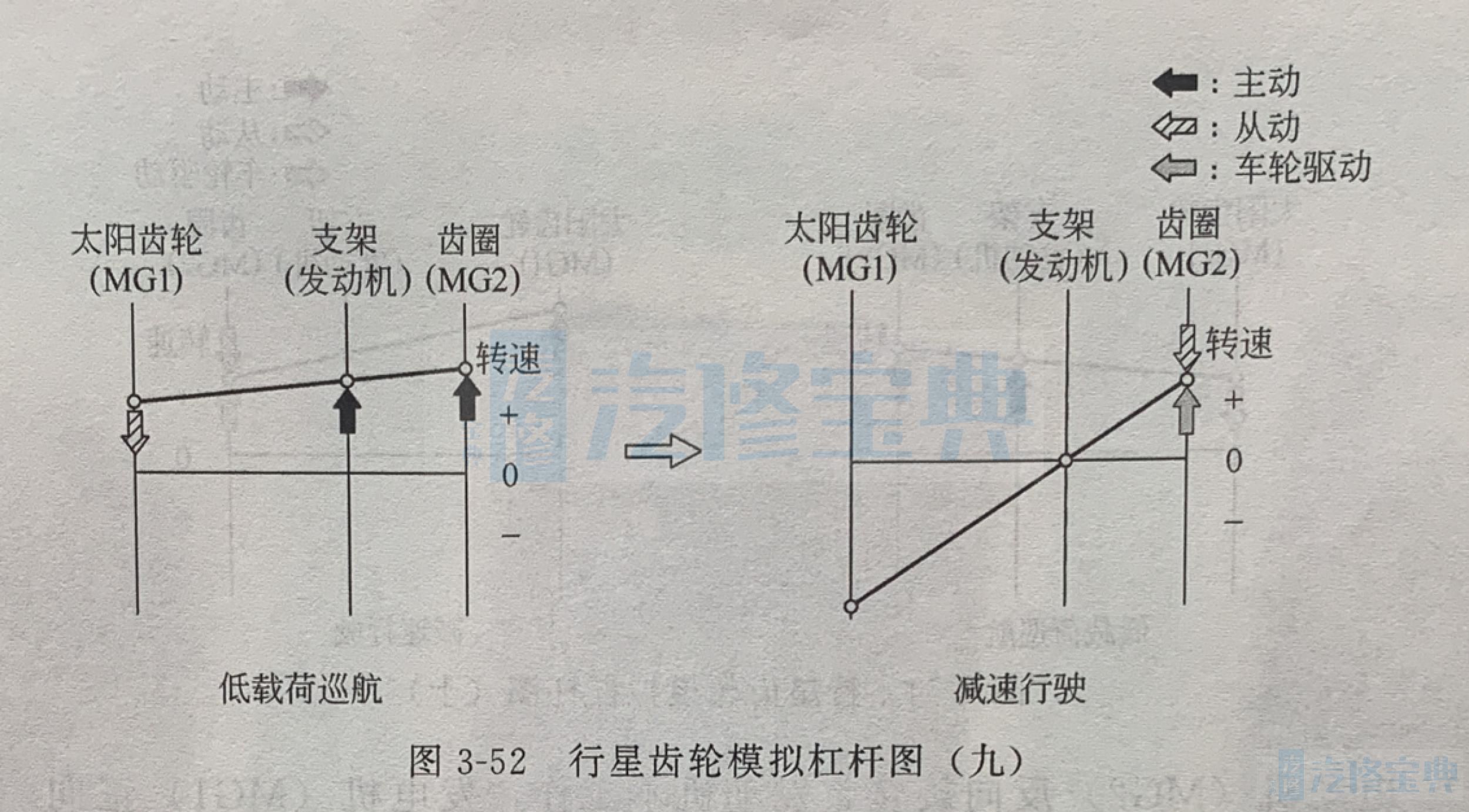
(6)减速工况(图3-32中的F阶段)①D挡减速 车辆以D挡减速行驶时,发动机停止工作。这时,车轮驱动电动机(MG2),使电动机(MG2)作为发电机运行,为HV蓄电池充电(图3-51、图3-52)。
车辆从较高速度开始减速时,发动机以预定速度继续工作,保护行星齿轮组。
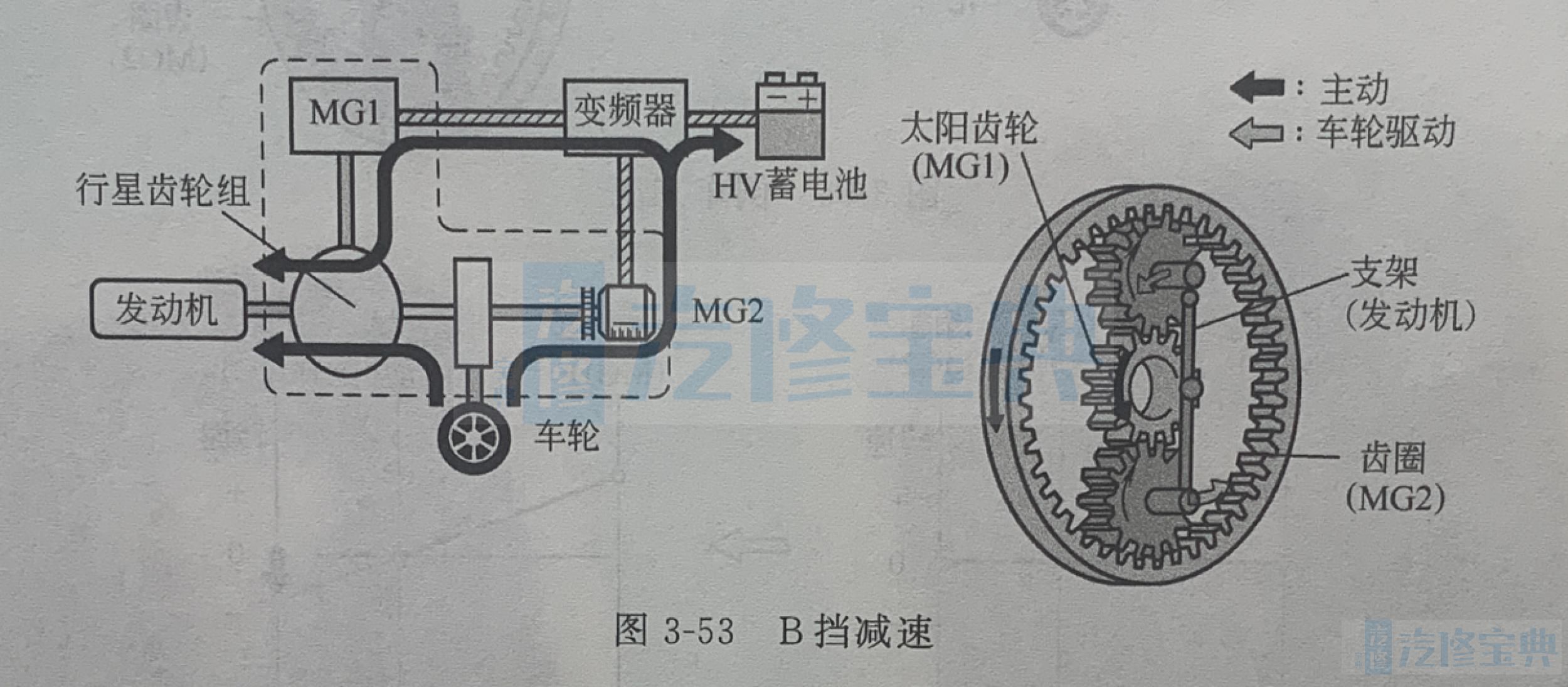
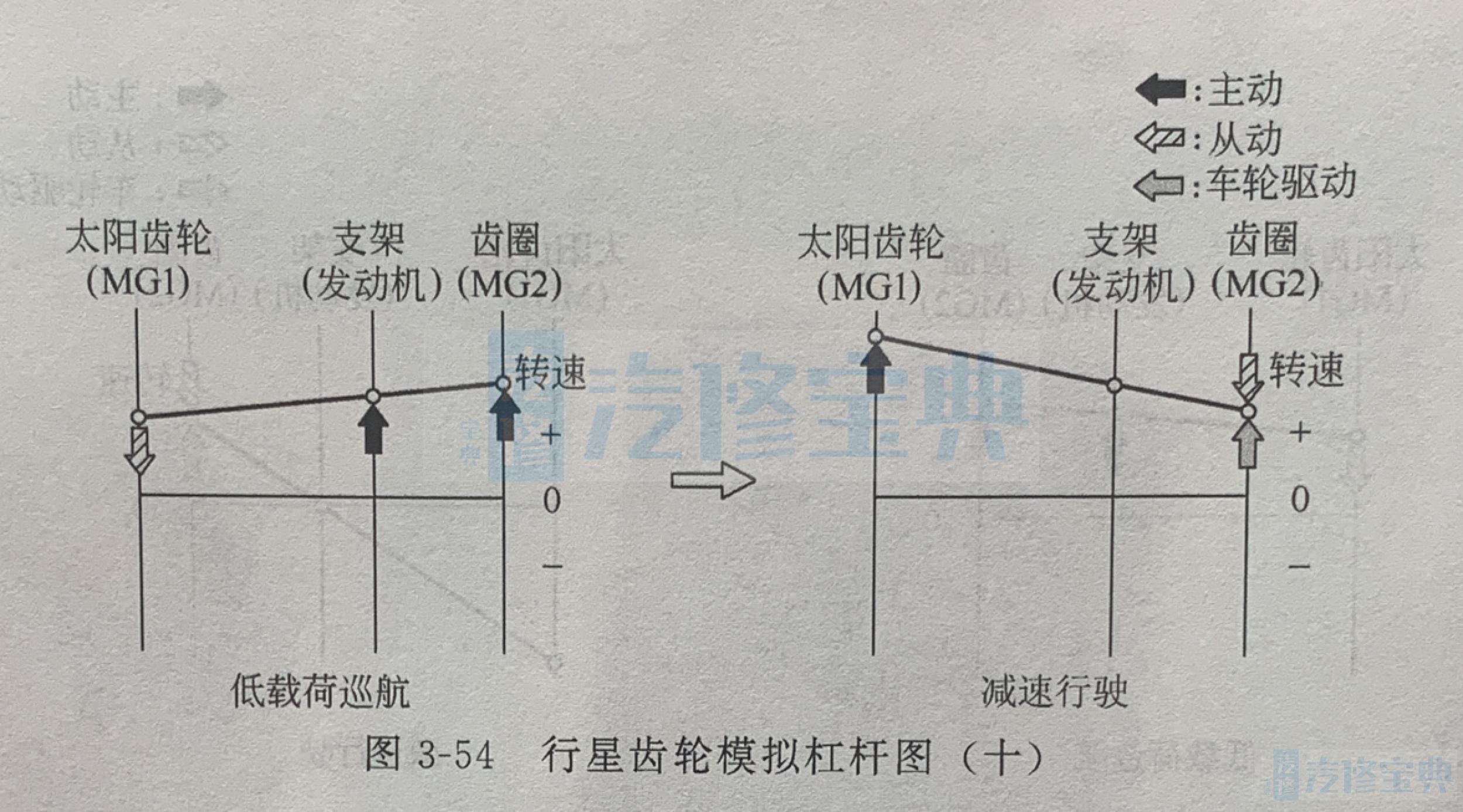
②B挡减速 车辆以B挡减速行驶时,车轮驱动电动机(MG2),使电动机(MG2)作为发电机工作,为HV蓄电池充电,并为发电机(MG1)供电。这样,MG1保持发动机转速并施加发动机制动(图3-53、图3-54)。这时,发动机燃油供给被切断。
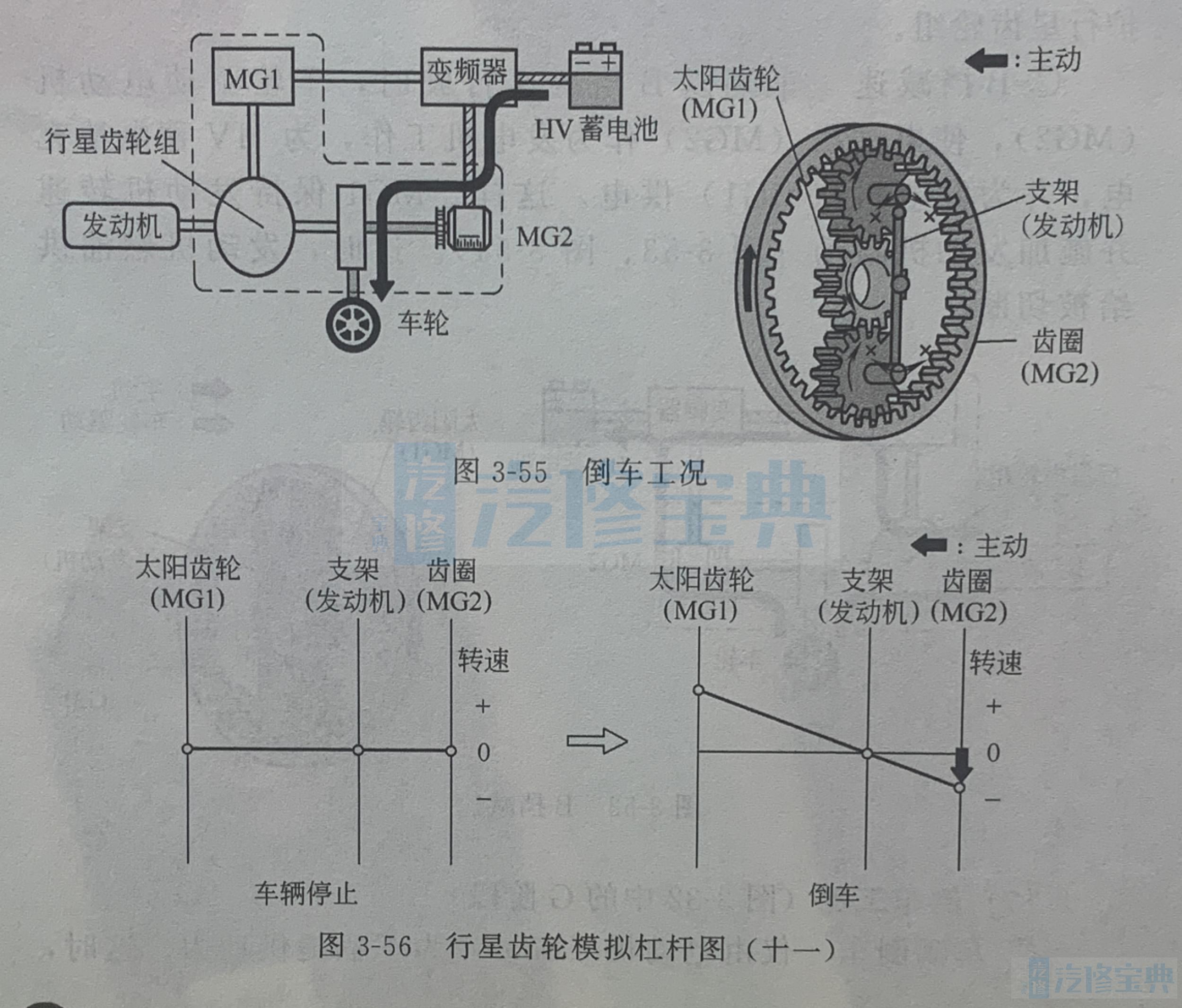
(7)倒车工况(图3-32中的G阶段)①车辆倒车仅由电动机(MG2)为车辆提供动力。这时,
电动机(MG2)反向旋转,发动机不工作,发电机(MG1)正向旋转,不发电(图3-55、图3-56)。
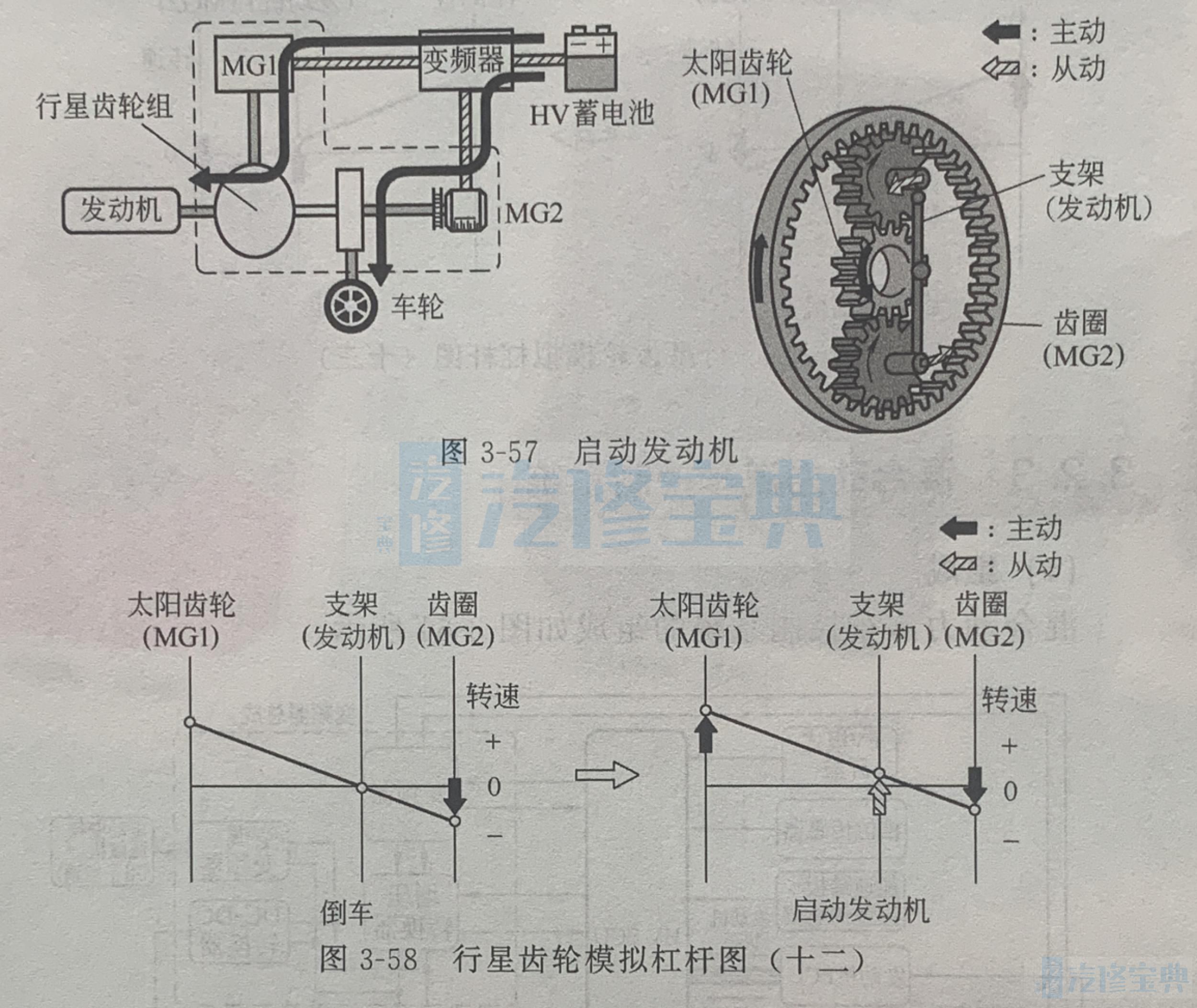
②启动发动机如果 HV ECU监视的任何项目如SOC、蓄电池温度、水温和电载荷状态与规定值有偏差,发电机(MG1)将发动机启动(图3-57、图3-58)。
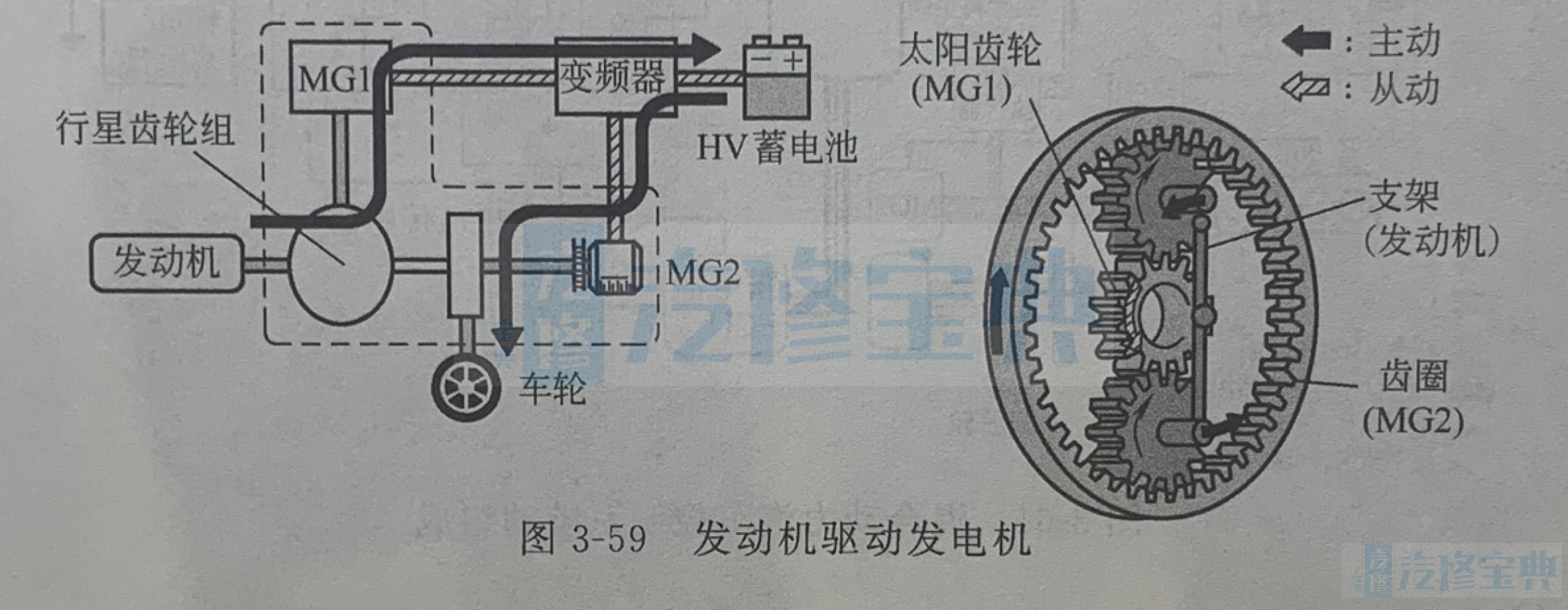
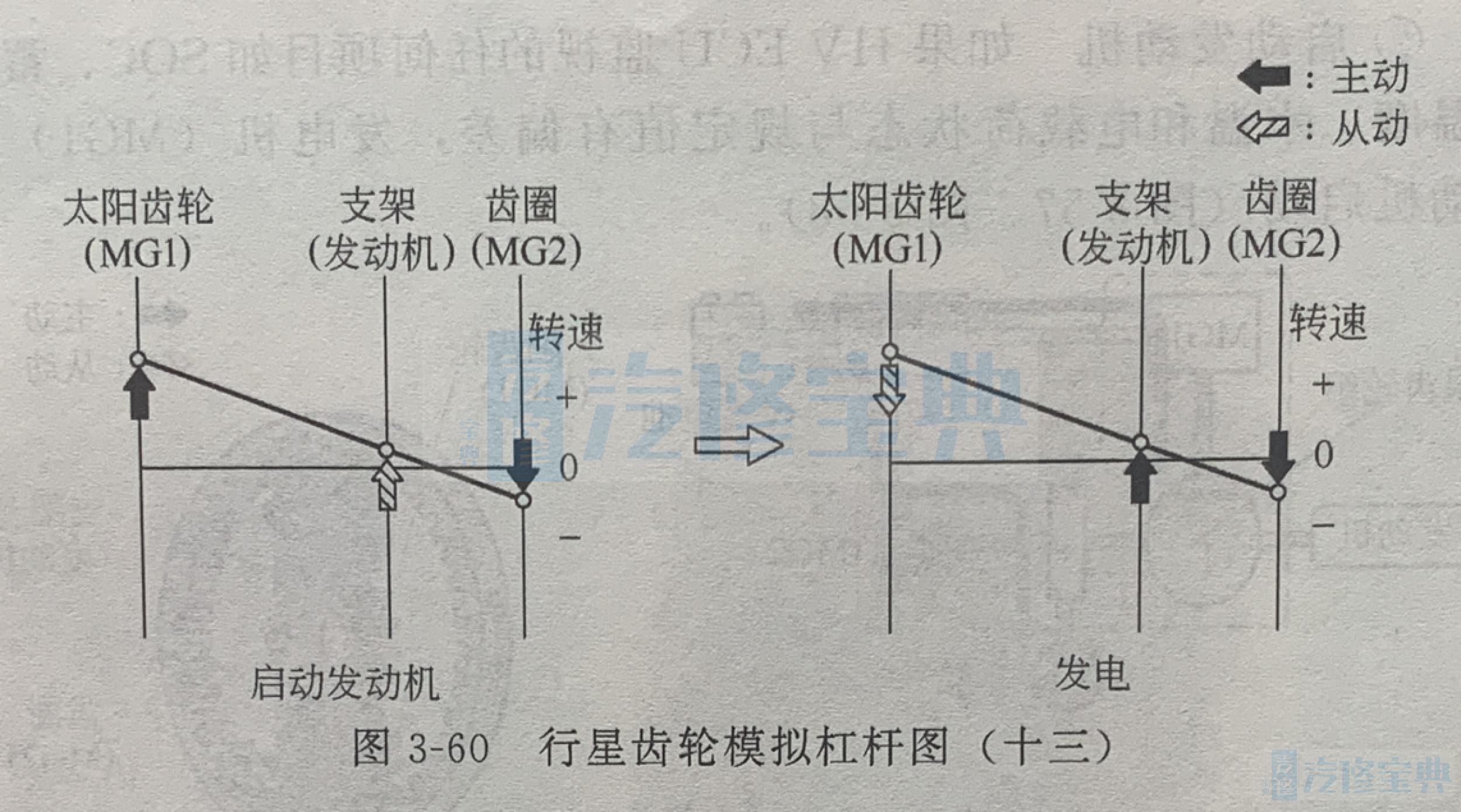
在随后的状态中,已经启动的发动机驱动发电机(MG1),为HV蓄电池充电(图3-59、图3-60)。