以雷克萨斯ES300H混动车型为例,多路通信系统使用4种通信协议(CANLIN、AVC-LAN和MOST)以获得流线型线束配置。
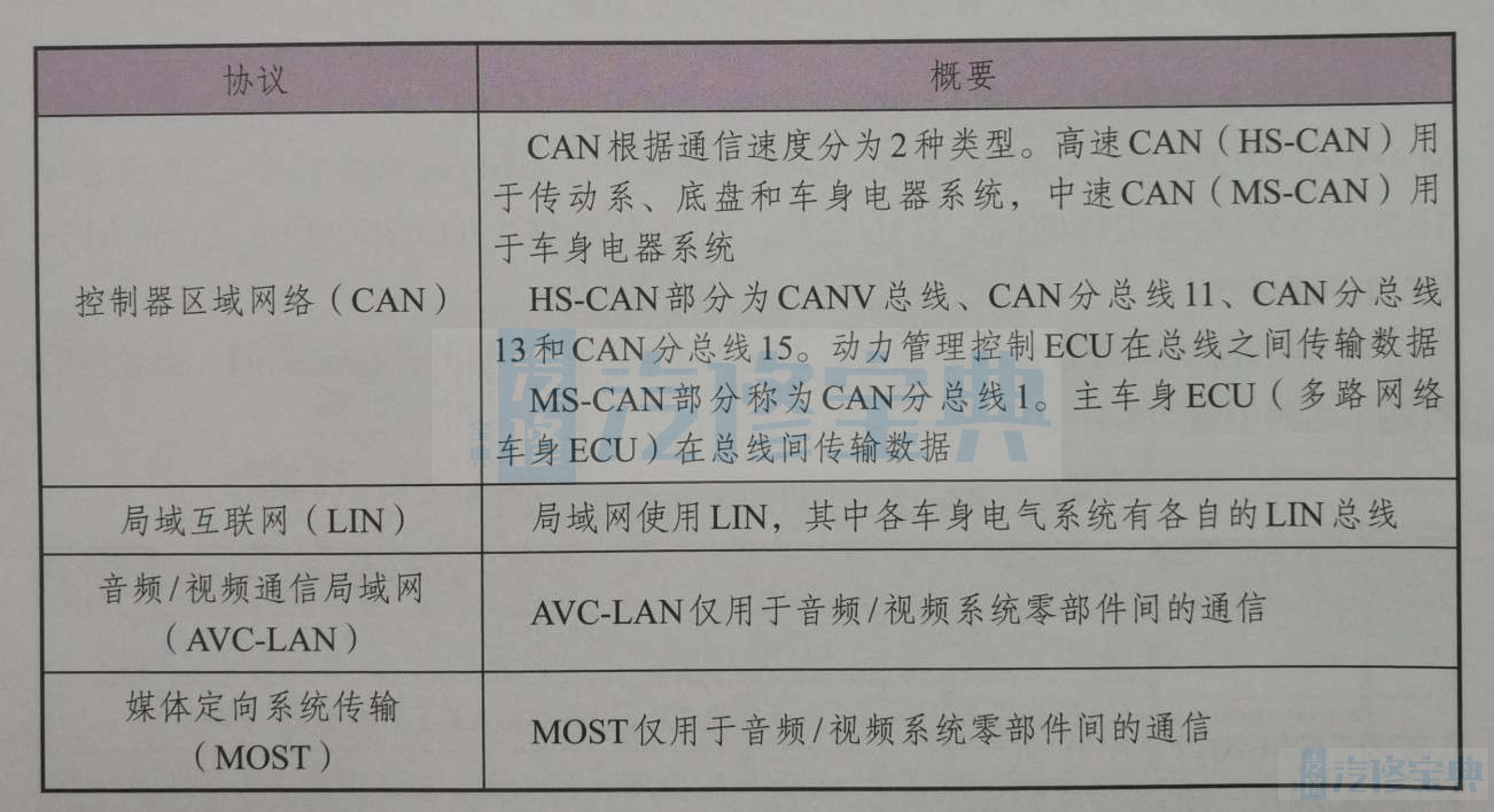
由于传动系统、底盘、车身电气系统中引入了CAN通信系统,实现了流线型线束配置。由于CAN、LIN、AVC-LAN和MOST网络这些多路通信系统彼此之间不兼容而无法直接通信。CAN、LIN、AVC-LAN和MOST是单独的网络。因此,某些ECU用作网关传送数据,从而使CAN和LN网络间进行通信。
CAN、LIN、AVC-LAN和MOST所使用的协议(即建立数据通信的规则)各不相同。如果网络中的各个ECU使用不同的数据架构,例如,通信速度、通信线束或信号不同,则彼此之间就无法沟通。因此,必须在它们之间建立协议(规则)。
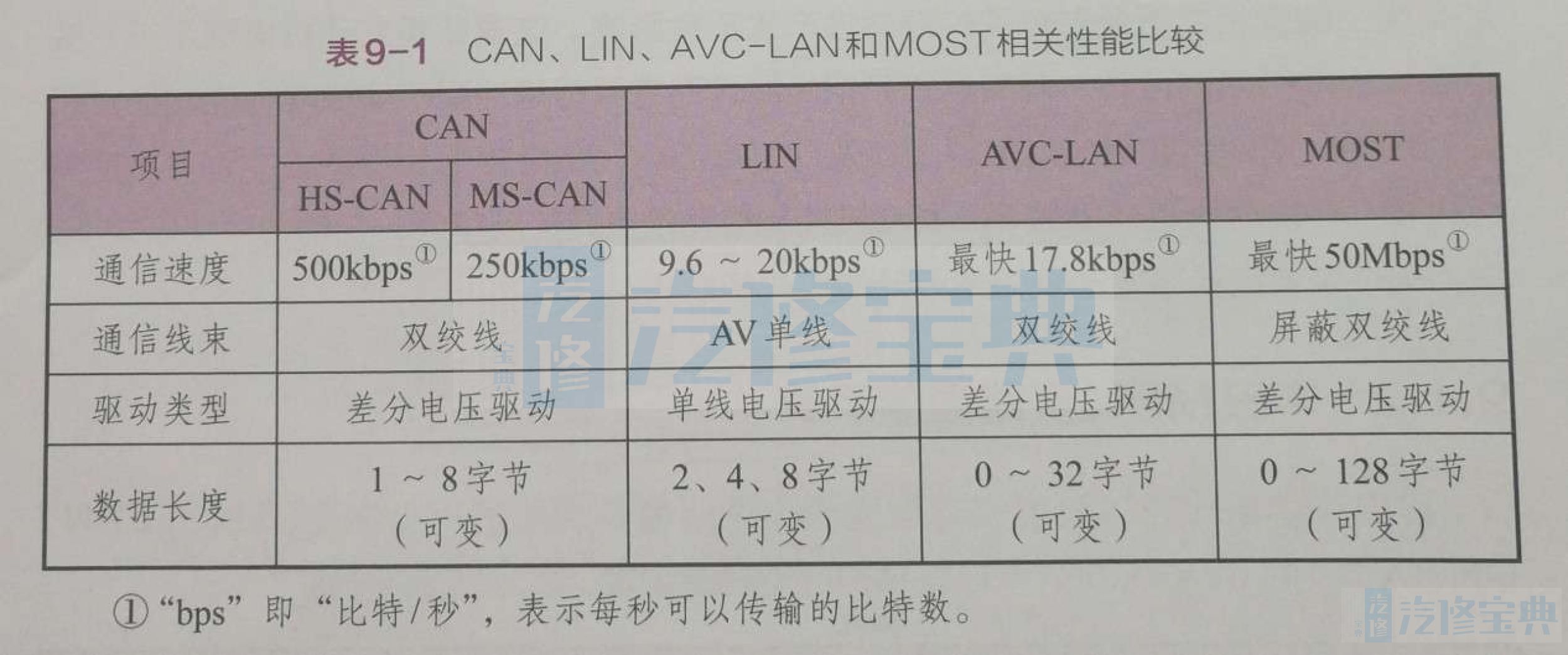
与LIN和AVC-LAN相比,CAN具有高速数据传输的特点。因此,CAN能够以比其他协议更快的速度传输更多数据。这一特点可使其在传动系和底盘控制系统中准确地传输数据。这些系统要求在短时间内传输大量数据。CAN、LIN、AVC-LAN和MOST相关性能比较见表9-1。
控制器区域网络(CAN)使用2种类型的CAN总线:HS-CAN高速总线与MS-CAN中速总线。CANV总线、CAN分总线11、CAN分总线13和CAN分总线15为以500kbps工作的HS-CAN总线。CAN分总线1为以250kbps工作的MS-CAN中速总线。