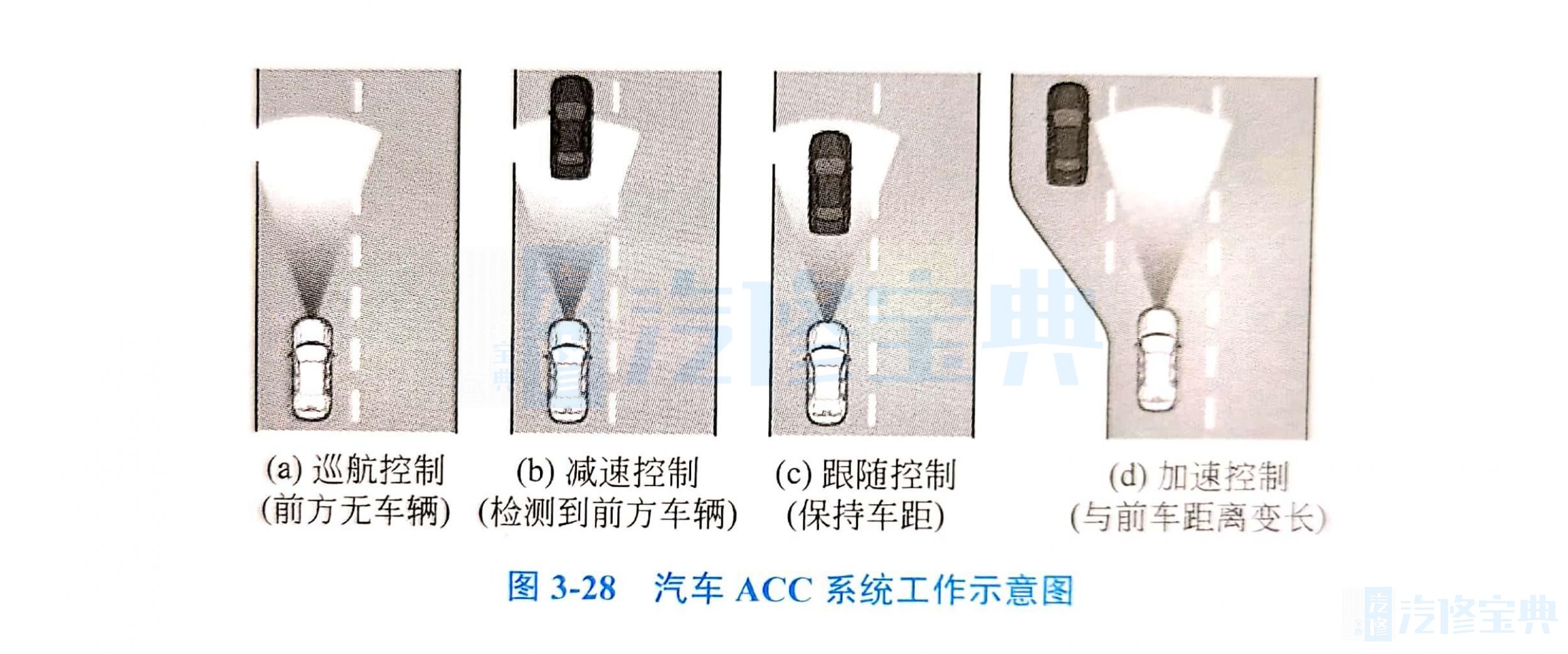
汽车ACC系统通过对车辆纵向运动进行自动控制,以减轻驾驶员的劳动强度,保障行车安全,并通过方便的方式为驾驶员提供辅助支持。 汽车ACC系统工作示意图如图3-28所示,共有4种典型的操作,即巡航控制、减速控制、跟随控制和加速控制。
假设当前车辆设定车速为100km/h,目标车辆行驶速度为80km/h。当前车辆前方无行驶车辆时,当前车辆将处于普通的巡航行驶状态,ACC系统按照设定的行驶车速对车辆进行巡航控制。当前车辆前方有目标车辆,且目标车辆的行驶速度小于当前车辆的行驶速度时,ACC系统将控制当前车辆进行减速,确保两车间的距离为所设定的安全距离。当ACC系统将当前车辆减速至理想的目标值之后采用跟随控制,与目标车辆以相同的速度行驶。当前方的目标车辆发生移线,或当前车辆移线行驶使得前方又无行驶车辆时,ACC系统将对当前车辆进行加速控制,使当前车辆恢复到设定的车速。在恢复行驶速度后,ACC系统又转入对当前车辆的巡航控制。当驾驶员参与车辆驾驶后,ACC系统自动退出对车辆的控制。
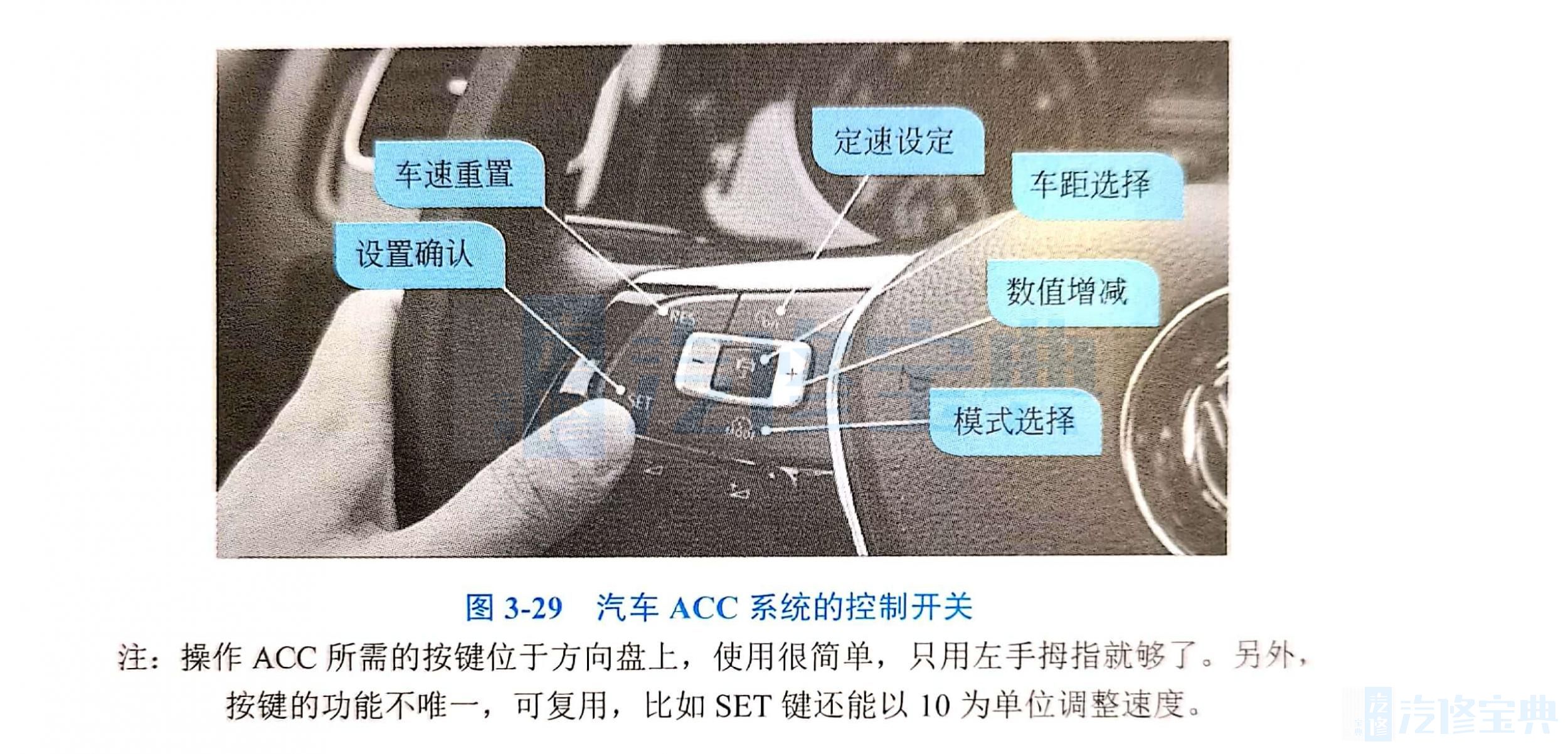
汽车ACC系统的指令通过控制开关由驾驶员设定,如图3-29所示。其中模式选择主要有限速巡航和自适应巡航:车速有设定区间,如30~150km/h,在高速公路,设定的速度不要超过高速公路的限速,一般在80~120km/h之间;车距选择一般由远及近有5个挡位供选择,选择多大的车距,要根据车速和路况决定,
比如在高速公路,建议距离设定在较远的两个挡位。这些参数设定完,ACC系统就可以工作了。当汽车进入自适应巡航状态后,右脚不用一直踩着油门,只要握好转向盘,控制行驶方向即可。如果当前的车速低于设定的车速,汽车会自动加速到设定的车速,并保持巡航。车头的测距传感器持续工作,探测前方是否有车辆:如果前方有车辆,在设定的距离之外,则汽车仍然保持设定的速度行驶;如果前方车辆速度较慢,当前车辆接近了预设的安全距离范围,ACC系统就会马上做出反应,主动进行制动,让汽车保持在预定的安全距离之外。如果驾驶员不人为实施变道超车等动作,同时前方车辆保持之前的行驶状态,当前车辆会一直在安全距离之外跟车行驶。如果这时前车变道让行,前方道路无车了,ACC系统会马上加速到预定的速度。如果前方车辆不让,驾驶员决定变道超车,这时完全不用理会ACC系统,直接深踩油门,变道超车就可以了。另外,如果驾驶员预见前方的路况比较复杂,担心ACC系统不能正确处理,只需轻踩刹车就可以解除ACC系统对车速的控制权。