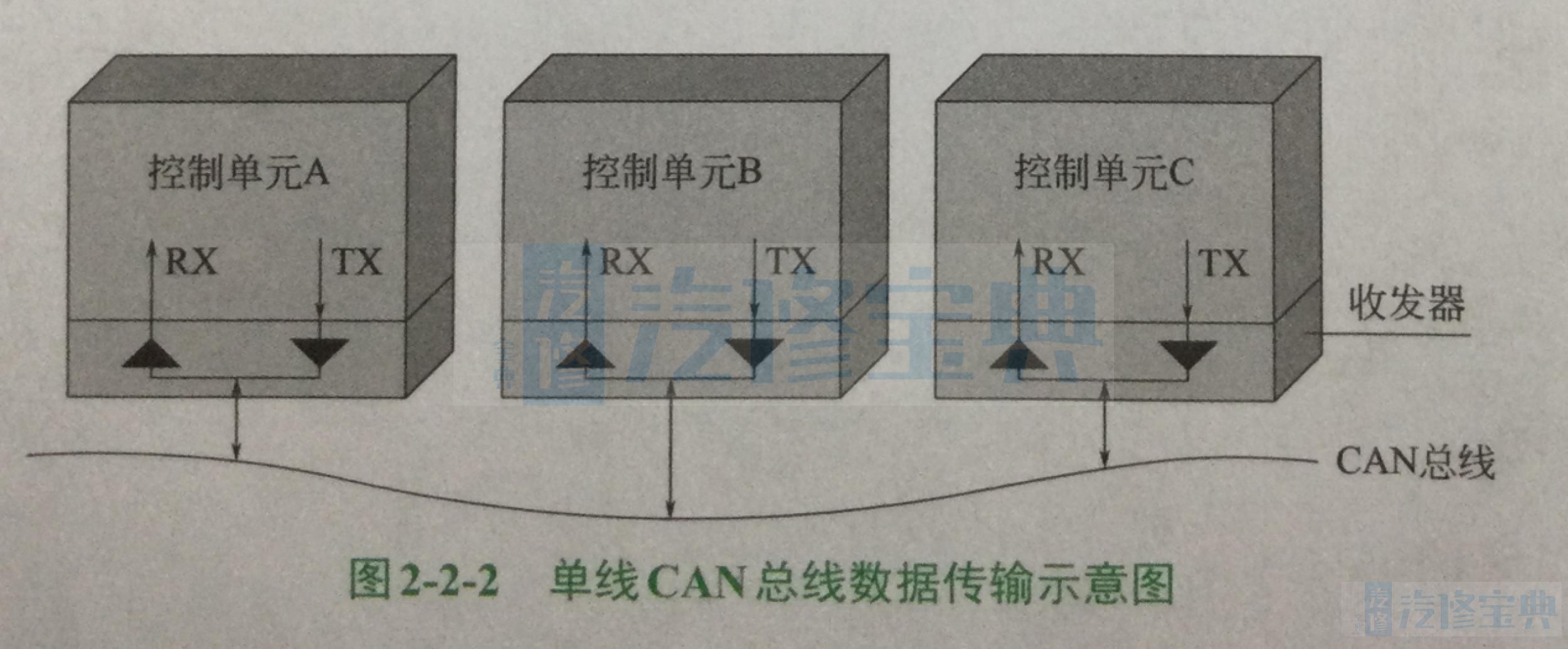
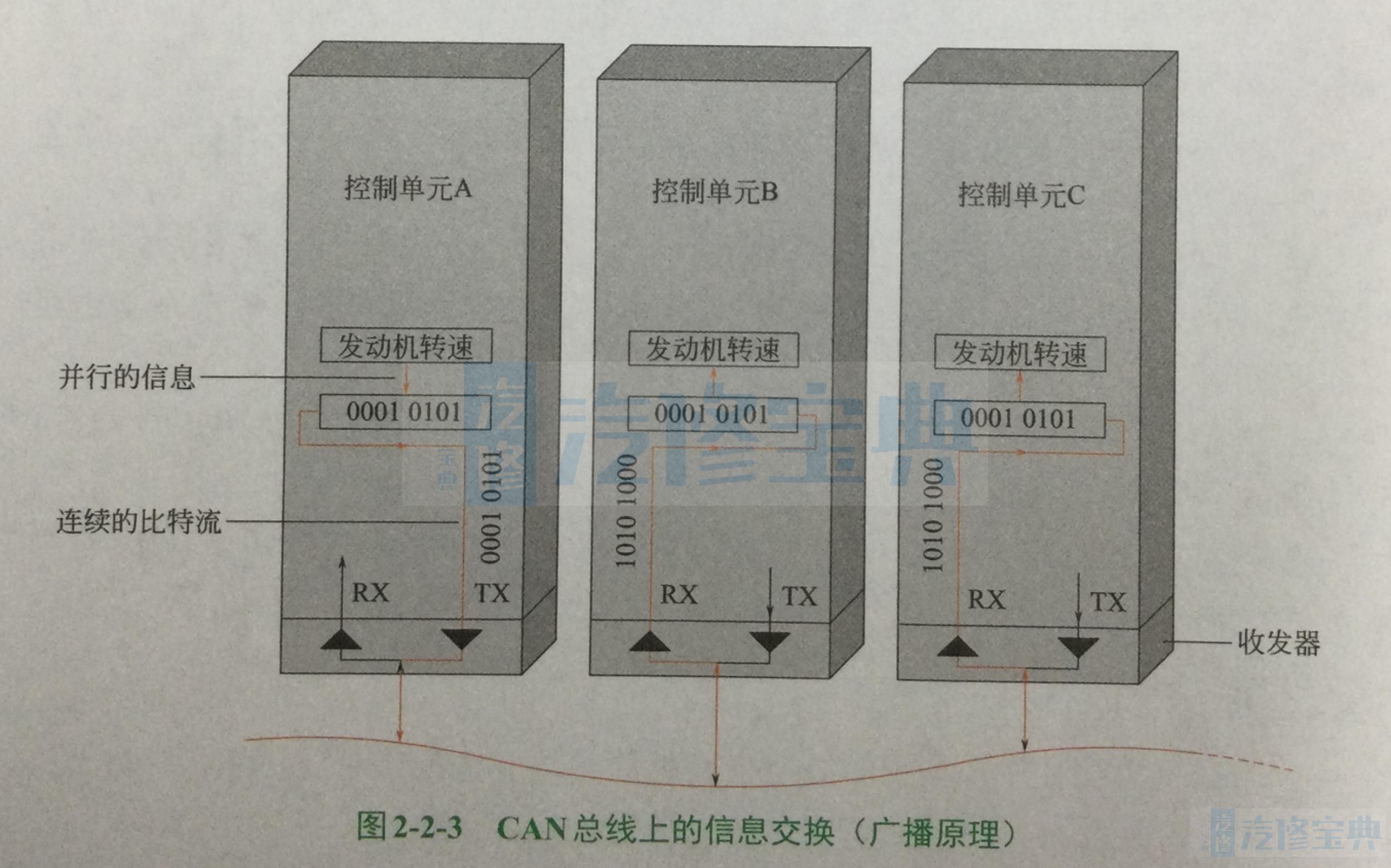
1.CAN总线的传输速率: 目前,CAN总线系统中的信号是采用数字方式经铜导线传输的,其最大稳定传输速率可达1000 kbit/s(1 Mbit/s)。 大众和奥迪公司将最大标准传输速率规定为500 kbit/s,并将CAN总线系统分为三个专门的系统。 驱动CAN总线(高速),亦称动力CAN总线,其标准传输速率为500 kbit/s,可基本满足实时要求,主要用于发动机、变速器、ABS、转向助力等汽车动力系统的数据传输。 舒适CAN总线(低速),其标准传输速率为100kbit/s,主要用于空调系统、中央门锁(车门)系统、座椅调节系统的数据传输。 信息CAN总线(低速),其标准传输速率为100 kbit/s,主要用于对时间要求不高的领域,如导航系统、组合音响系统、CD转换控制等。 2.信息的发送与接收: CAN数据总线在发送信息时,每个控制单元均可接收其他控制单元发送出的信息。在通信技术领域,也把该原理称为广播(图2-2-1~图2-2-3)。
3.CAN总线传输的数据类型:
CAN数据总线所传输的数据有4种类型:数据帧、远程帧、错误帧和过载帧。
(1)数据帧:
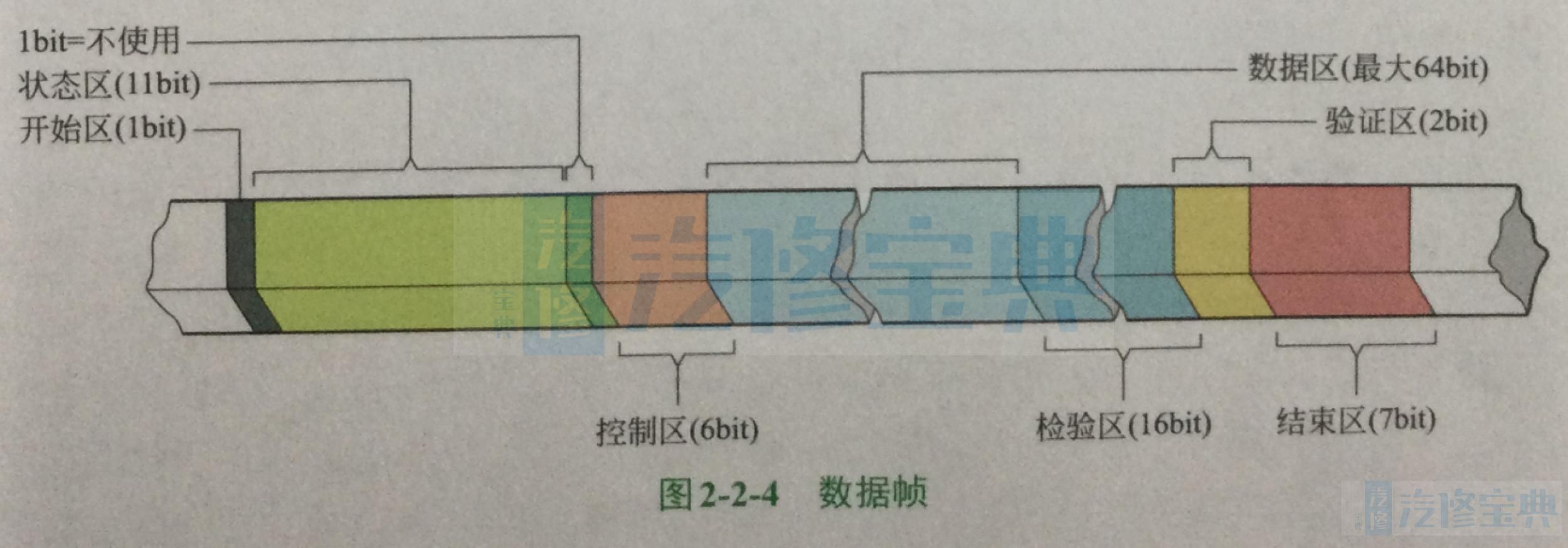
数据帧的每条完整信息由7个域构成,信息最大长度为108bit。在两条CAN导线上,所传输的数据内容是相同的,但是两条导线的电压状态相反(图2-2-4)。
开始域。开始域(长度为1bit)标志数据开始,CAN-High导线的电压大约为5V(具体数值视系统而定),CAN-Low导线的电压大约为0V。
②仲裁域。仲裁域(长度为11bit)用于确定所传数据的优先级。如果在同一时刻有两个控制单元都想发送数据,则优先级高的数据先行发出。
③控制域。控制域(长度为6bit)用于显示数据区中的数据数量,以便让接收器(接收数据的控制单元)检验自己接收到的、来自发送器(发送数据的控制单元)的数据是否完整。
④数据域。数据与(长度不确定,视具体情况而定,最大长度为64bit)是信息的实质内容。
⑤安全域。安全域(长度为16bit)用于检验数据在传输中是否出现错误。
⑥应答域。应答域(长度为2bit)是数据接收器发给数据发送器的确认信号,表示接收器已经正确、完整地收到了发送器发送的数据。如果检测到在数据传输中出现错误,则接收器会迅速通知发送器,以便发送器重新发送该数据。
结束域。结束域(长度为7bit)标志着数据的结束。
(2)远程帧:
远程帧的功能是将数据请求从发送器传到接收器。通过发送远程帧,作为某数据接收器的控制单元会对不同的数据传送进行初始化设置。
远程帧由开始域、仲裁域、控制域、安全域、应答域和结束域6个不同的域组成。
(3)错误帧:
错误帧的功能是对所发送的数据进行错误检测、错误标定及错误自检。
错误帧由两个不同的域组成,第1个域为不同控制单元提供错误标志的叠加,第2个域是错误界定符。
错误标志包括主动错误标志和被动错误标志两种形式。
(4)过载帧:
接收器在电路尚未准备好或在间歇域期间检测到一个“显性”位时,会发送过载帧以延迟数据的传送。过载帧包括过载标志和过载界定符两个域。
(5)帧间空间:
数据帧或远程帧与其前面帧的隔离是通过帧间空间实现的,无论其前面的帧为何类型。
所不同的是过载帧与错误帧之前没有帧间空间,多个过载帧之间也不是由帧间空间隔离的。帧间空间包括间歇域和总线空闲域。如果“错误被动”的控制单元已作为前一数据的发送器时,则其帧间空间除了间歇域、总线空闲域外,还包括挂起传送域。间歇域包括3个“隐性”位,间歇期间所有的控制单元均不允许传送数据帧或远程帧,唯一要做的是标志一个过载条件。