1.防滑转的控制方式。 ASR通过适当减小发动机输出功率和对滑转的车轮实施制动等方式来控制驱动轮的滑转率。 (1)控制发动机输出功率。 当汽车在起步或行驶中出现两驱动车轮同时滑转时, ASR ECU立刻输出控制信号,通过减小节气门的开度、减少喷油时间、推迟点火时间等手段,适当地减小发动机的输出功率,以抑制驱动车轮的滑转,避免汽车牵引力和行驶稳定性下降。 (2)驱动轮制动控制。 当汽车在行驶中出现某驱动轮滑转或两个驱动轮同时滑转,但两边车轮的滑转率不一致时,ASR输出控制信号,对滑转车轮施以制动力,将两边驱动轮的滑转率控制在目标范围之内,以提高汽车在滑溜路面行驶时的起步和加速能力,确保汽车行驶的稳定性。这种控制方式的作用类似于差速锁,在一边驱动车轮陷于泥坑而部分或完全失去驱动能力时,对其施以制动后,可使另一边的驱动车轮发挥其驱动力,从而使汽车能驶离泥坑。当两边的驱动车轮都滑转,但滑转率不同时,则可对两边驱动车轮施以不同的制动力。 (3)发动机输出功率与驱动轮制动综合控制。 为了达到最理想的控制效果,采用发动机输出功率控制与驱动轮制动控制相结合的控制方式。汽车在行驶过程中,滑溜路面的情况千差万别,驱动力的状态也是变化不断,综合控制系统可根据发动机的工作状态和车轮滑转的实际情况采取相应的控制在两边车轮同时出现滑转、发动机转速较高、汽车行驶速度较高等情况下,ASR电子控制器优先选择发动机输出功率控制方式。如果减小发动机输出功率还未能使两边驱动轮滑转率控制在目标范围之内,则再辅以驱动轮制动控制在两边驱动轮滑转率不一致、发动机输出功率较小、汽车行驶速度不高的情况下,ASRECU则首选驱动轮制动控制方式。必要时,在对驱动车轮施以制动的同时,再辅以减小发动机输出功率控制,以便将两边的驱动轮滑转率控制在最佳的范围之内。
2.防滑转控制原理。
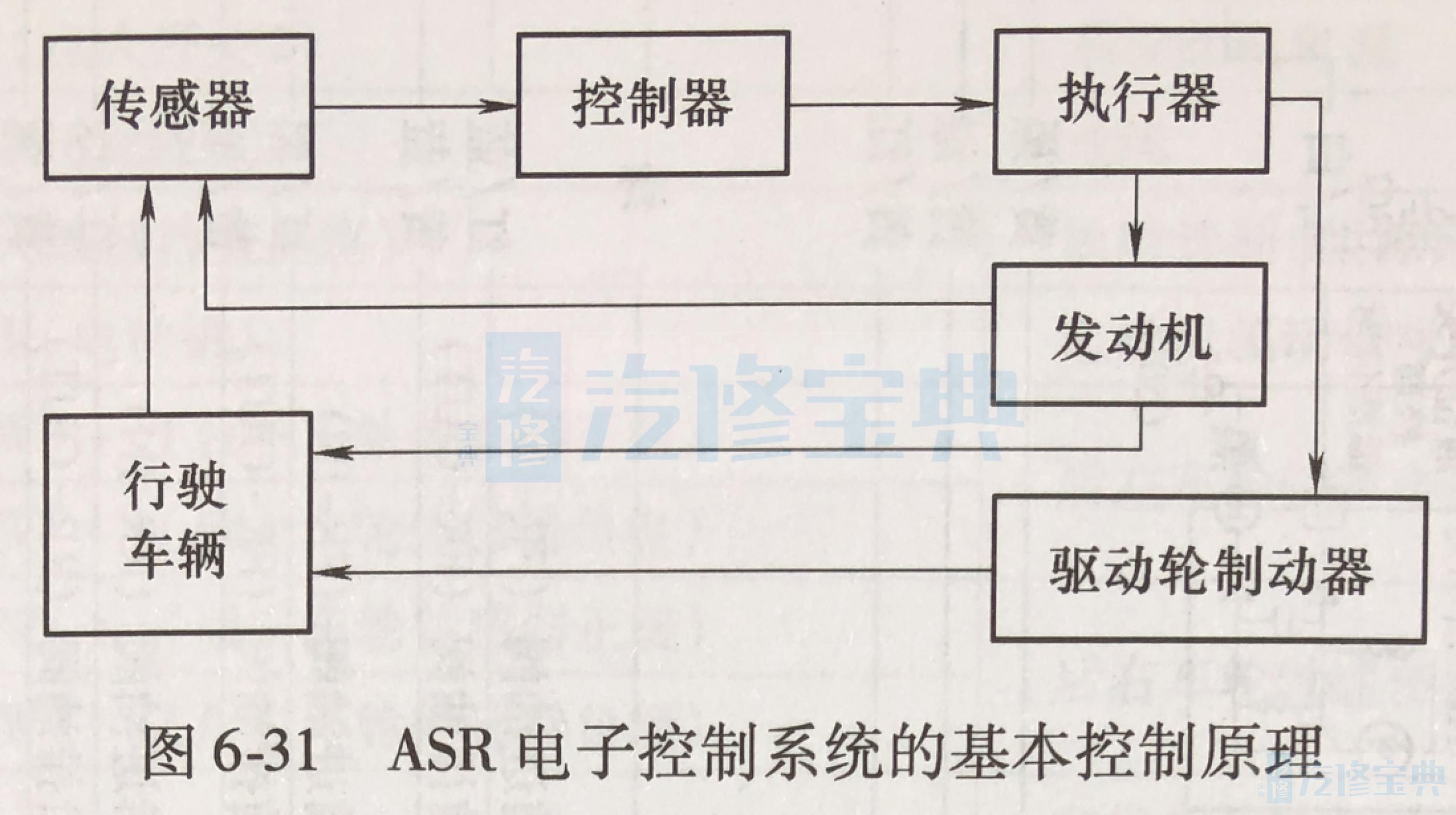
防滑转(ASR)电子控制系统的控制原理如图6-31所示。
汽车行驶时,车轮转速传感器将驱动车轮转速及非驱动轮转速转变为电信号,输送给ASR控制器。控制器根据车轮转速传感器的信号计算驱动车轮的滑转率,如果滑转率超出了目标范围,控制器再参考节气门位置传感器、发动机转速传感器及其他相关传感器的电信号,进行综合分析后确定控制方式,并输出控制信号,使相应的执行器动作,将驱动车轮的滑转率控制在目标范围之内。